
基于增益调度的倾转旋翼无人机模态转换飞行控制的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于增益调度的倾转旋翼无人机模态转换飞行控制的开题报告.docx
基于增益调度的倾转旋翼无人机模态转换飞行控制的开题报告一、研究背景近年来,随着无人机技术的不断发展,倾转旋翼无人机作为一种新型无人机深受研究者们的关注。倾转旋翼无人机可以实现垂直起降和水平飞行,并能够在低速飞行和飞行中转换模态,具有灵活性和适应性等优点,因此在实际应用中有着很广泛的应用。但是,转换过程中存在控制困难、动力匹配、结构设计等诸多问题亟待解决。本课题旨在基于增益调度的方法,探究倾转旋翼无人机的模态转换控制问题,在保证飞行安全的前提下,实现高效、稳定、平滑的模态转换,在实际应用中发挥出倾转旋翼无人

倾转旋翼无人机.pdf
本公开涉及一种倾转旋翼无人机,包括机身(10)、主翼(20)、旋翼组件(30)、贯穿于所述机身的倾转轴(40)以及驱动所述倾转轴转动的驱动机构,所述旋翼组件固定在所述倾转轴的两端并且包括桨叶(31)和驱动所述桨叶的第一电机(32),所述驱动机构包括固定在所述机身内的舵机(51)、连接在所述舵机的输出轴的第一皮带轮(52)以及套设在所述倾转轴外周的第二皮带轮(53),所述第一皮带轮和所述第二皮带轮之间通过皮带(54)传动。将旋翼组件设置在倾转轴的端部,只需在机身内部驱动倾转轴转动即可使得无人机在固定翼模式与
倾转旋翼无人机.pdf
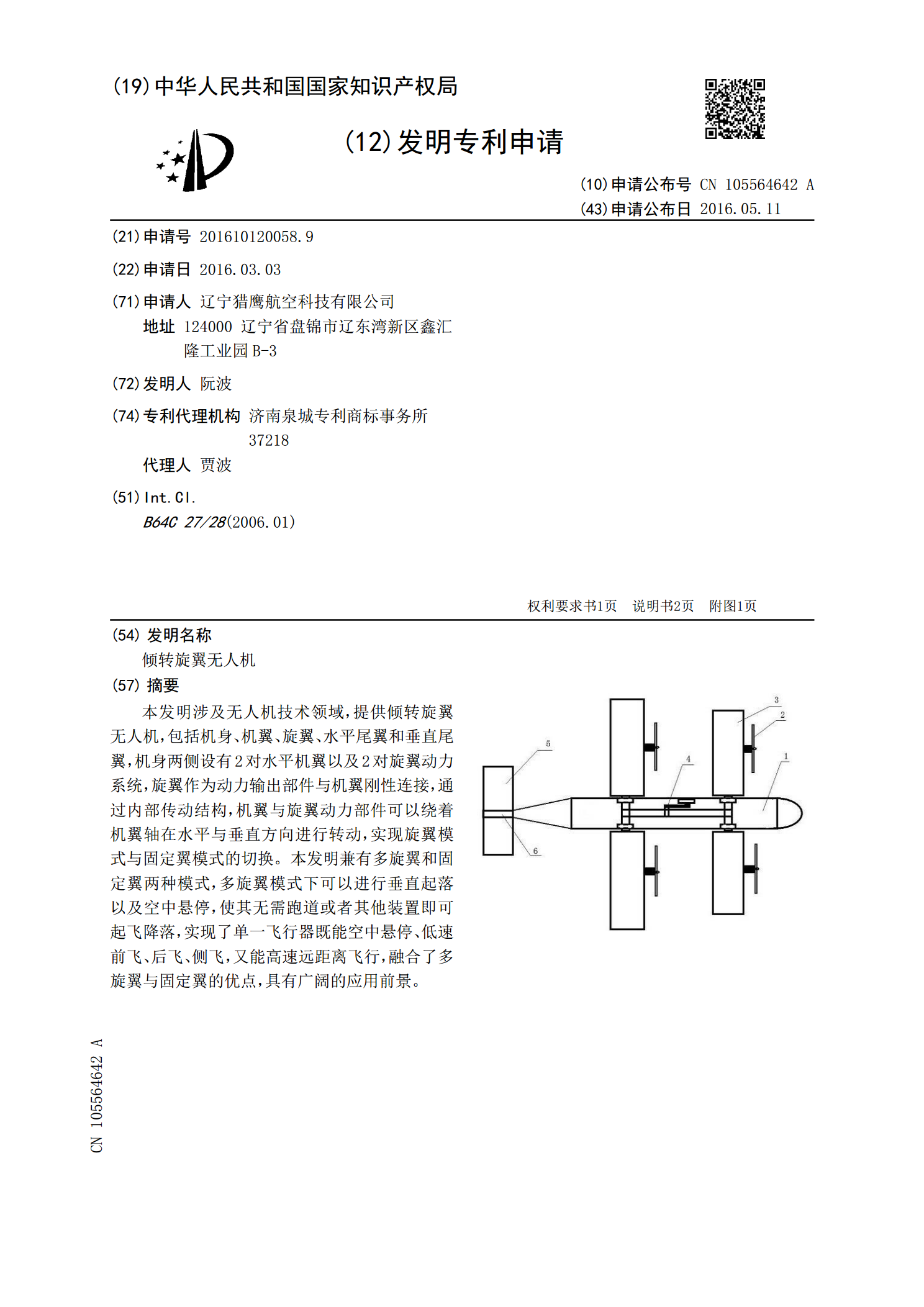
本发明涉及无人机技术领域,提供倾转旋翼无人机,包括机身、机翼、旋翼、水平尾翼和垂直尾翼,机身两侧设有2对水平机翼以及2对旋翼动力系统,旋翼作为动力输出部件与机翼刚性连接,通过内部传动结构,机翼与旋翼动力部件可以绕着机翼轴在水平与垂直方向进行转动,实现旋翼模式与固定翼模式的切换。本发明兼有多旋翼和固定翼两种模式,多旋翼模式下可以进行垂直起落以及空中悬停,使其无需跑道或者其他装置即可起飞降落,实现了单一飞行器既能空中悬停、低速前飞、后飞、侧飞,又能高速远距离飞行,融合了多旋翼与固定翼的优点,具有广阔的应用前景
载人倾转旋翼飞行滑板.pdf
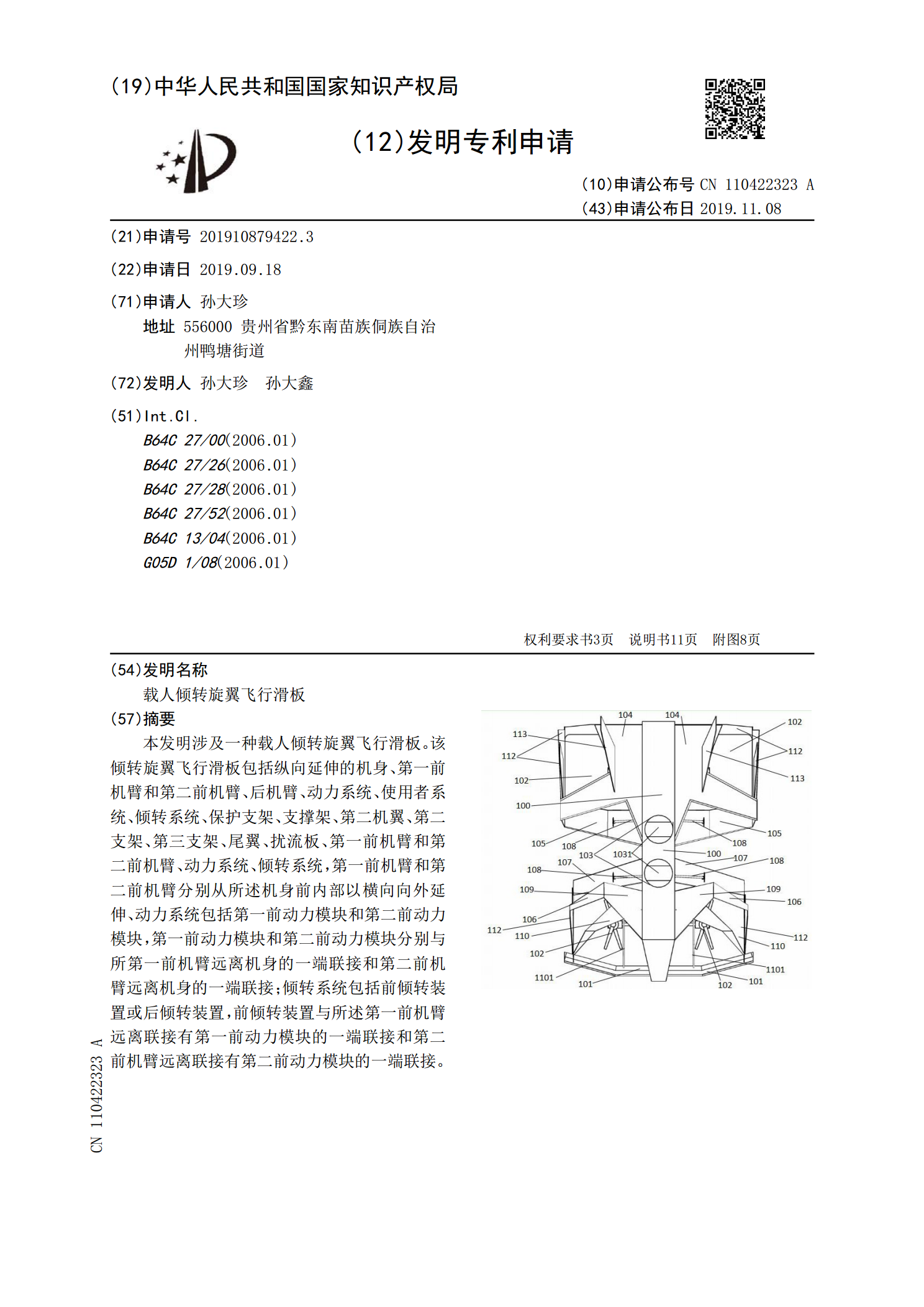
本发明涉及一种载人倾转旋翼飞行滑板。该倾转旋翼飞行滑板包括纵向延伸的机身、第一前机臂和第二前机臂、后机臂、动力系统、使用者系统、倾转系统、保护支架、支撑架、第二机翼、第二支架、第三支架、尾翼、扰流板、第一前机臂和第二前机臂、动力系统、倾转系统,第一前机臂和第二前机臂分别从所述机身前内部以横向向外延伸、动力系统包括第一前动力模块和第二前动力模块,第一前动力模块和第二前动力模块分别与所第一前机臂远离机身的一端联接和第二前机臂远离机身的一端联接;倾转系统包括前倾转装置或后倾转装置,前倾转装置与所述第一前机臂远离

倾转旋翼飞行器.pdf
本发明公开了倾转旋翼飞行器,包括机身和位于两侧的机翼,所述机翼上设有旋转机构,所述旋转机构包括可沿飞行器飞行方向调节桨距角的螺旋桨,所述机身内还设有与所述旋转机构传动连接的旋转动力机构,所述旋转机构包括外壳体,所述外壳体的开口处设有短舱壳体,所述短舱壳体一侧设有转动轴,所述转动轴上固定设有齿轮B,所述短舱壳体内设有电机B,所述电机B的输出端设有螺旋桨,所述电机B底部设有电机基座,所述电机B固定在电机基座上,所述电机基座一侧还设有电机C,所述短舱壳体上还设有电机固定腔,所述电机C安装在所述电机固定腔内。本发