
倾转旋翼无人机.pdf

Ma****57


1/5

2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

倾转旋翼无人机.pdf
本公开涉及一种倾转旋翼无人机,包括机身(10)、主翼(20)、旋翼组件(30)、贯穿于所述机身的倾转轴(40)以及驱动所述倾转轴转动的驱动机构,所述旋翼组件固定在所述倾转轴的两端并且包括桨叶(31)和驱动所述桨叶的第一电机(32),所述驱动机构包括固定在所述机身内的舵机(51)、连接在所述舵机的输出轴的第一皮带轮(52)以及套设在所述倾转轴外周的第二皮带轮(53),所述第一皮带轮和所述第二皮带轮之间通过皮带(54)传动。将旋翼组件设置在倾转轴的端部,只需在机身内部驱动倾转轴转动即可使得无人机在固定翼模式与
倾转旋翼无人机.pdf
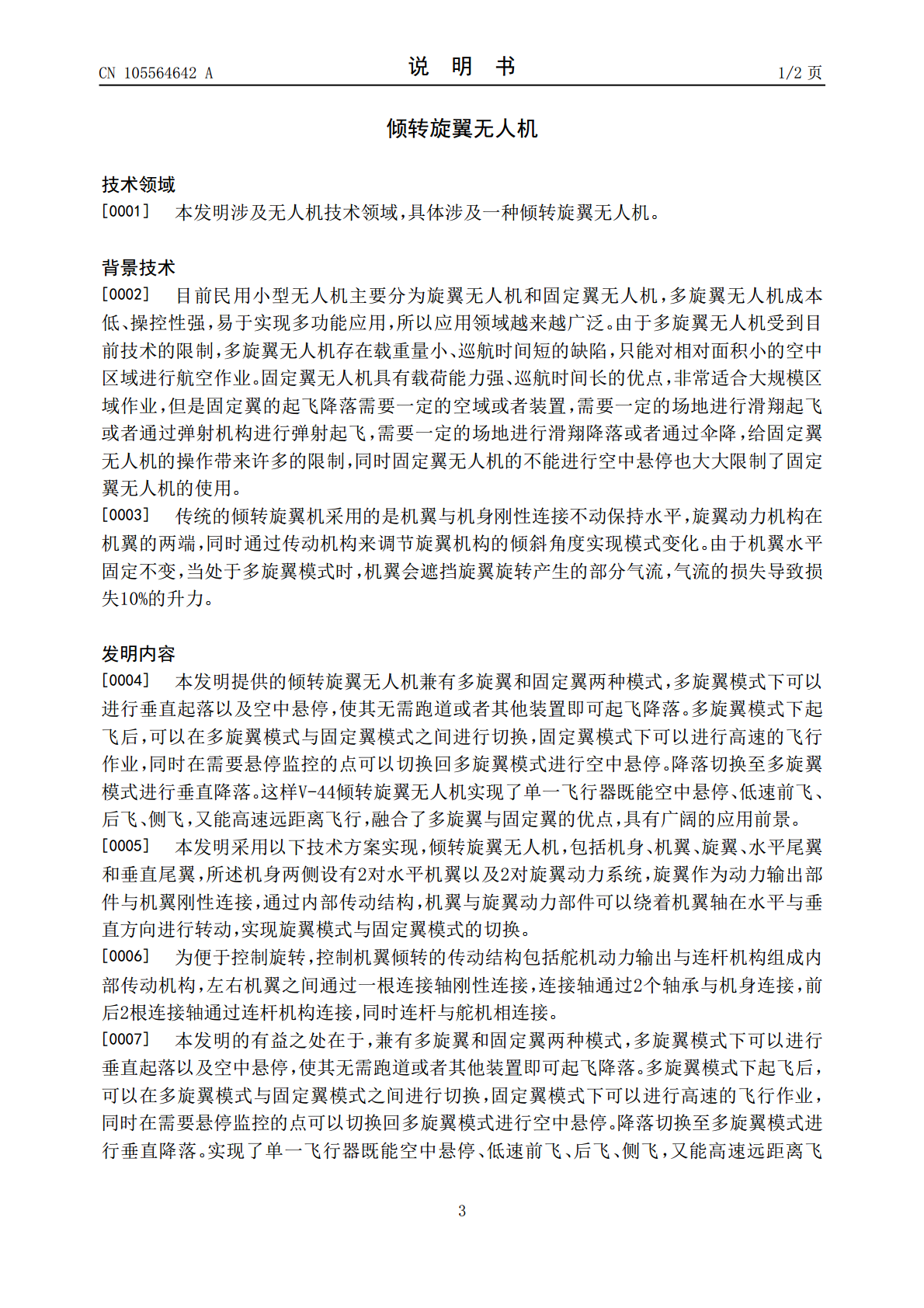
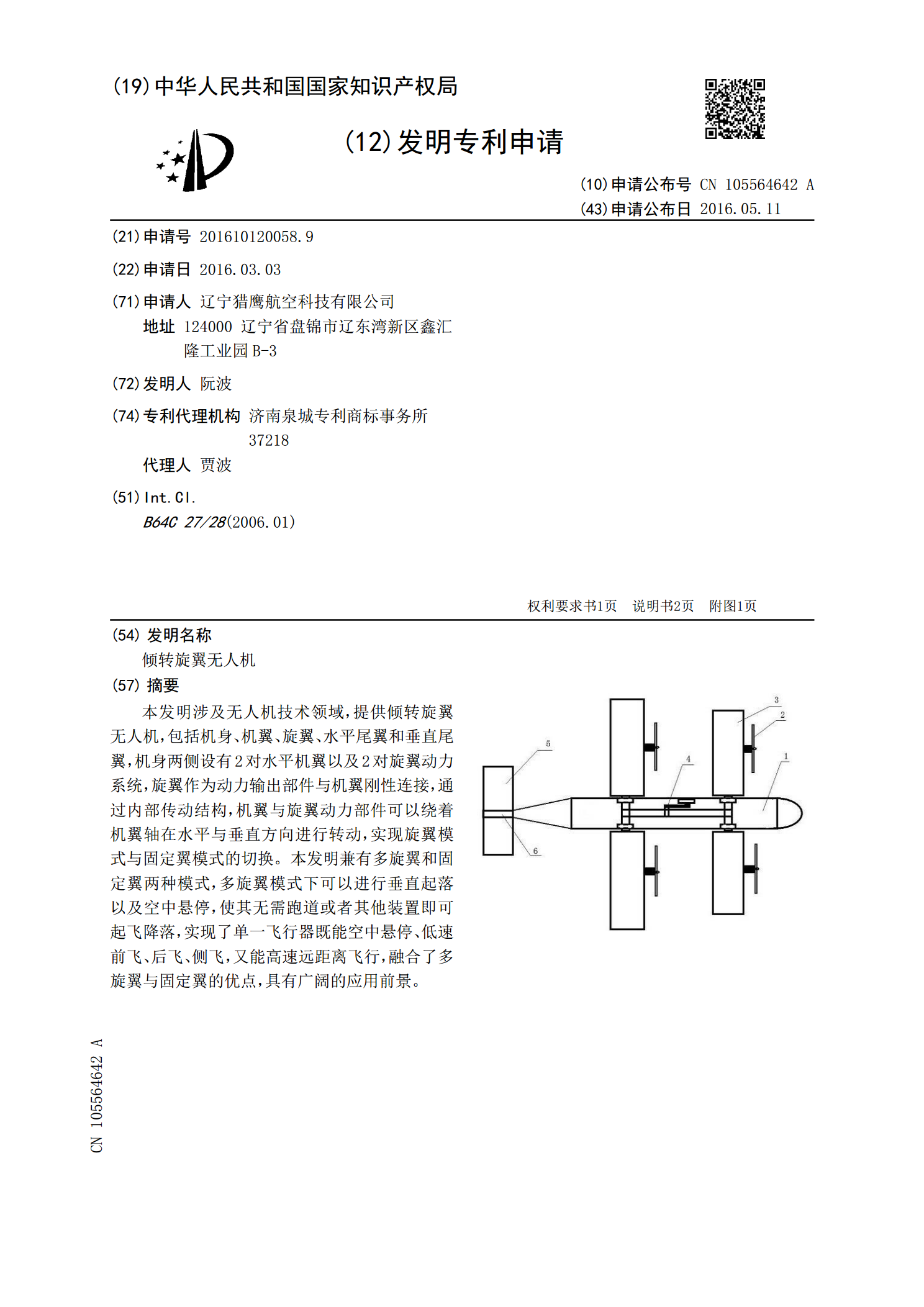
本发明涉及无人机技术领域,提供倾转旋翼无人机,包括机身、机翼、旋翼、水平尾翼和垂直尾翼,机身两侧设有2对水平机翼以及2对旋翼动力系统,旋翼作为动力输出部件与机翼刚性连接,通过内部传动结构,机翼与旋翼动力部件可以绕着机翼轴在水平与垂直方向进行转动,实现旋翼模式与固定翼模式的切换。本发明兼有多旋翼和固定翼两种模式,多旋翼模式下可以进行垂直起落以及空中悬停,使其无需跑道或者其他装置即可起飞降落,实现了单一飞行器既能空中悬停、低速前飞、后飞、侧飞,又能高速远距离飞行,融合了多旋翼与固定翼的优点,具有广阔的应用前景
串列翼倾转旋翼无人机.pdf
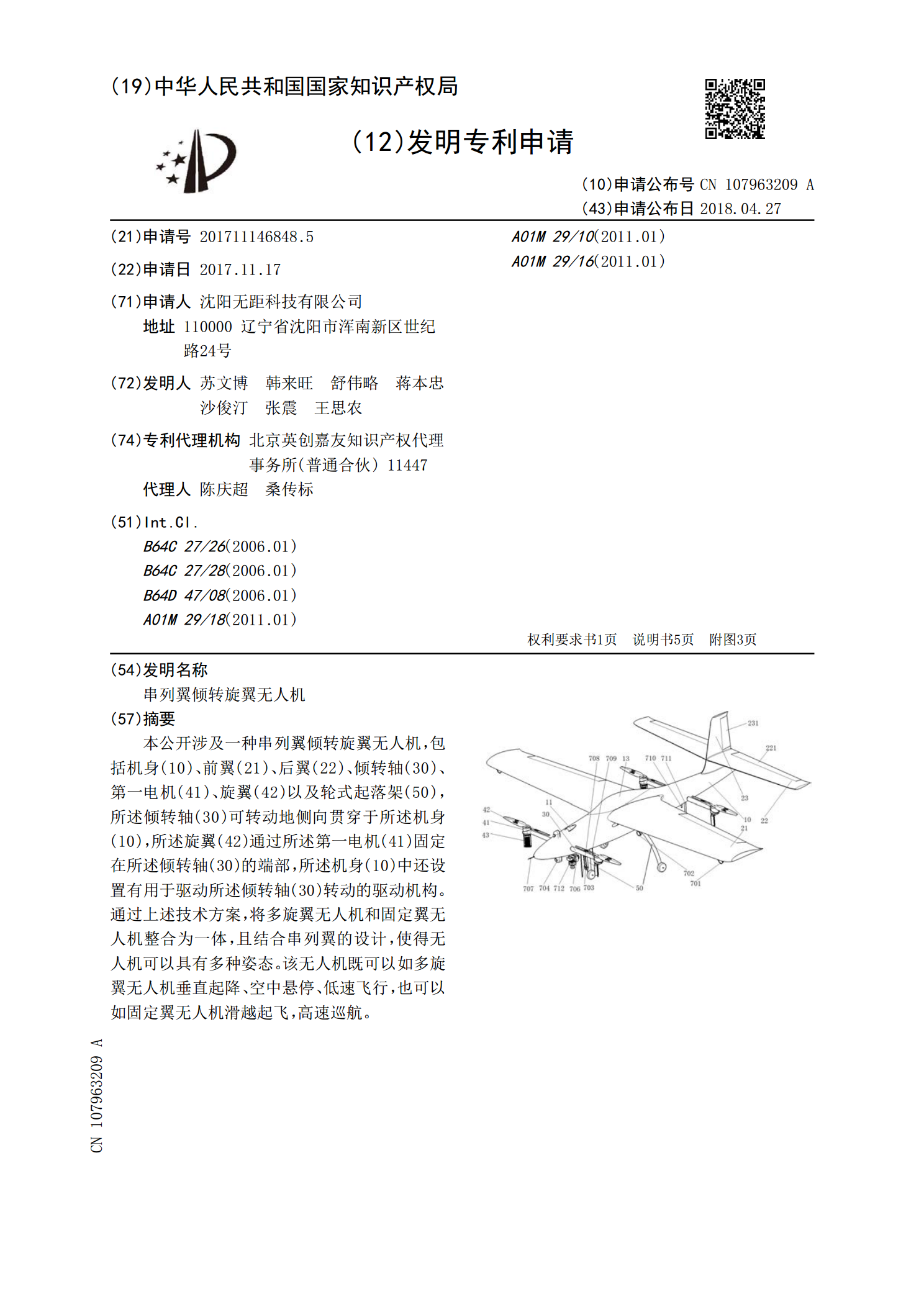
本公开涉及一种串列翼倾转旋翼无人机,包括机身(10)、前翼(21)、后翼(22)、倾转轴(30)、第一电机(41)、旋翼(42)以及轮式起落架(50),所述倾转轴(30)可转动地侧向贯穿于所述机身(10),所述旋翼(42)通过所述第一电机(41)固定在所述倾转轴(30)的端部,所述机身(10)中还设置有用于驱动所述倾转轴(30)转动的驱动机构。通过上述技术方案,将多旋翼无人机和固定翼无人机整合为一体,且结合串列翼的设计,使得无人机可以具有多种姿态。该无人机既可以如多旋翼无人机垂直起降、空中悬停、低速飞行,

电动倾转旋翼无人机.pdf
一种电动倾转旋翼无人机,中央开有旋翼涵道的机身的涵道上连有旋翼旋转轴,旋翼旋转轴的中心内设有定位碳板架,定位碳板架的上、下端分别安装有动力电机,两个动力电机通过齿轮分别对应连接上旋翼和下旋翼,上旋翼和下旋翼的旋转轴同轴固定在定位碳板架的中心。本发明的技术效果是:1、可以有效克服传统的左右两个倾转旋翼容易导致升力不均而产生的飞机侧翻的问题;2、保证旋翼倾转时飞机飞行模态转换的稳定性;3、可以通过四个飞机姿态控制舵的灵活组合和旋翼转速的调节很方便的控制飞机在悬停和飞行状态时的姿态。

一种倾转旋翼无人机.pdf
本发明公开了一种倾转旋翼无人机,前机身的后端与后机身的前端可拆卸连接,前机身的上侧可拆卸连接有中央机翼,中央机翼的两端分别转动连接有外机翼,外机翼中设置有驱动电机,驱动电机的输出轴设置有螺旋桨,外机翼内设置有倾转舵机,倾转舵机的转轴通过第一摆动组件与中央机翼连接,倾转舵机带动两个外机翼在水平转动状态和竖直转动状态之间切换,后机身背离前机身的一端设置有两个全动平尾;倾转舵机的转轴水平设置。目的在于解决现有技术中固定翼飞行方式与旋翼飞行方式无法共存在同一无人机上的问题。技术效果:既能垂直起降也能水平高速直飞,