
一种单旋翼轮足式多栖机器人.pdf

是飞****文章

1/6
2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种单旋翼轮足式多栖机器人.pdf
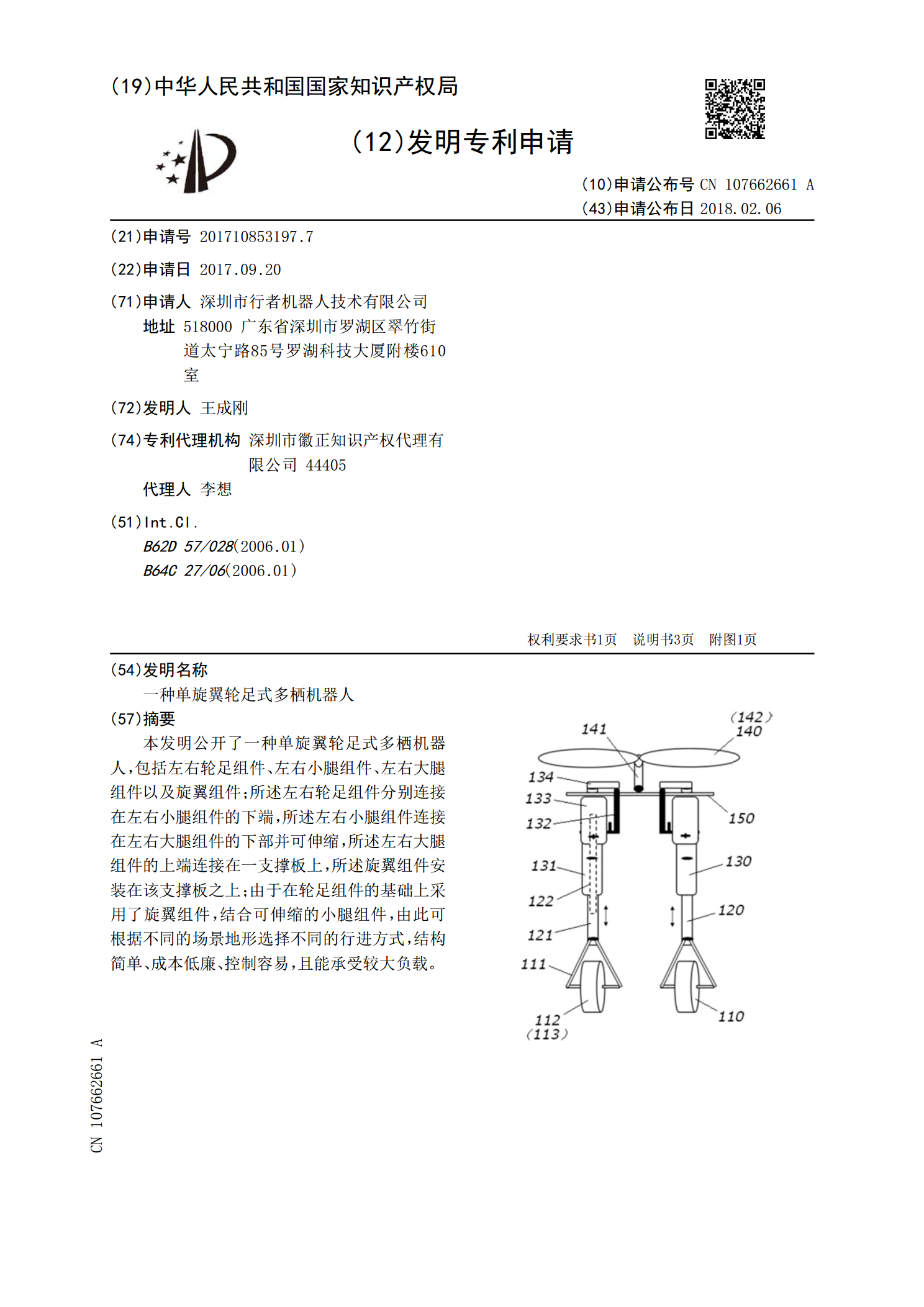
本发明公开了一种单旋翼轮足式多栖机器人,包括左右轮足组件、左右小腿组件、左右大腿组件以及旋翼组件;所述左右轮足组件分别连接在左右小腿组件的下端,所述左右小腿组件连接在左右大腿组件的下部并可伸缩,所述左右大腿组件的上端连接在一支撑板上,所述旋翼组件安装在该支撑板之上;由于在轮足组件的基础上采用了旋翼组件,结合可伸缩的小腿组件,由此可根据不同的场景地形选择不同的行进方式,结构简单、成本低廉、控制容易,且能承受较大负载。

一种多旋翼增压式飞行爬壁机器人.pdf
一种多旋翼增压式飞行爬壁机器人,包括主体及其上设置的多个旋翼装置,所述旋翼装置包括顶部旋翼机构与侧部旋翼机构,所述主体为框架式结构,主体的顶面上设置有顶部旋翼机构,主体的侧面上设置有侧部旋翼机构,主体的内部设置有设备箱,设备箱的顶部上设置有飞行控制器,飞行控制器与顶部旋翼机构、侧部旋翼机构进行电连接;所述主体的外凸角上连接有爬壁轮,爬壁轮、外凸角一一对应,且爬壁轮与飞行控制器进行电连接。本设计不仅适应能力较强,应用范围较广,而且设备融合度高,作业效率较高。
一种轮腿变换式的多足机器人.pdf
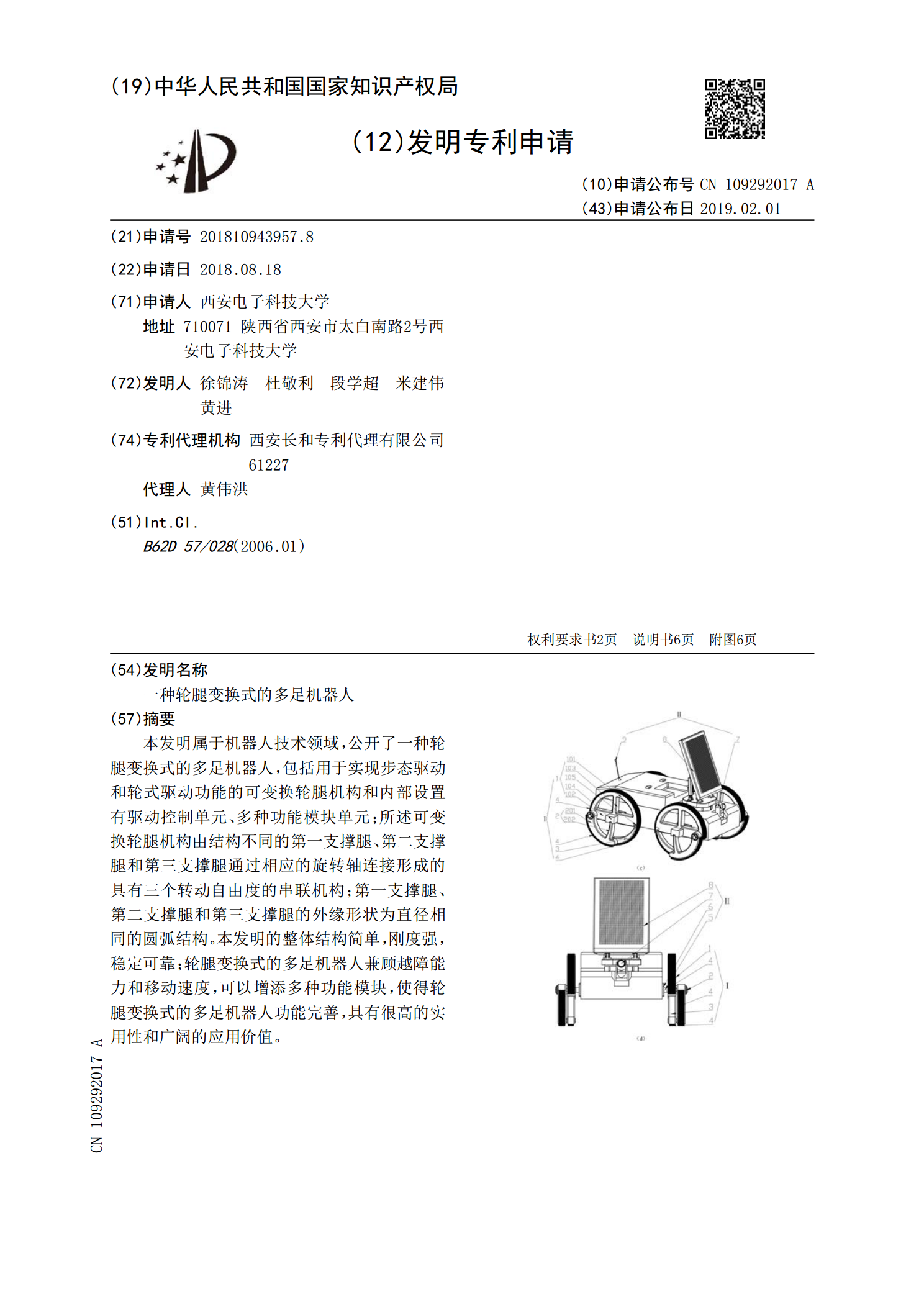
本发明属于机器人技术领域,公开了一种轮腿变换式的多足机器人,包括用于实现步态驱动和轮式驱动功能的可变换轮腿机构和内部设置有驱动控制单元、多种功能模块单元;所述可变换轮腿机构由结构不同的第一支撑腿、第二支撑腿和第三支撑腿通过相应的旋转轴连接形成的具有三个转动自由度的串联机构;第一支撑腿、第二支撑腿和第三支撑腿的外缘形状为直径相同的圆弧结构。本发明的整体结构简单,刚度强,稳定可靠;轮腿变换式的多足机器人兼顾越障能力和移动速度,可以增添多种功能模块,使得轮腿变换式的多足机器人功能完善,具有很高的实用性和广阔的应
一种多旋翼的便装式电机.pdf
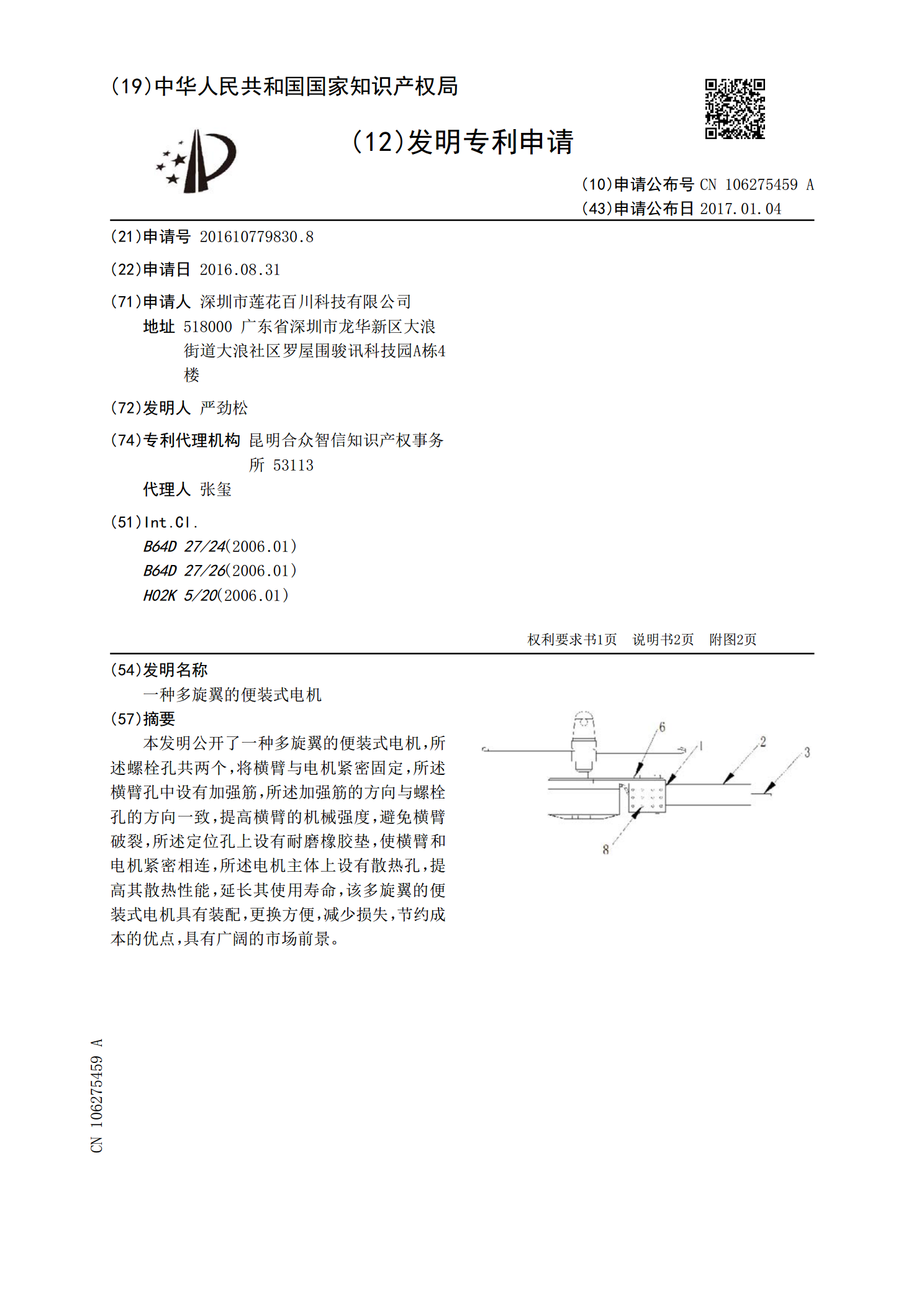
本发明公开了一种多旋翼的便装式电机,所述螺栓孔共两个,将横臂与电机紧密固定,所述横臂孔中设有加强筋,所述加强筋的方向与螺栓孔的方向一致,提高横臂的机械强度,避免横臂破裂,所述定位孔上设有耐磨橡胶垫,使横臂和电机紧密相连,所述电机主体上设有散热孔,提高其散热性能,延长其使用寿命,该多旋翼的便装式电机具有装配,更换方便,减少损失,节约成本的优点,具有广阔的市场前景。
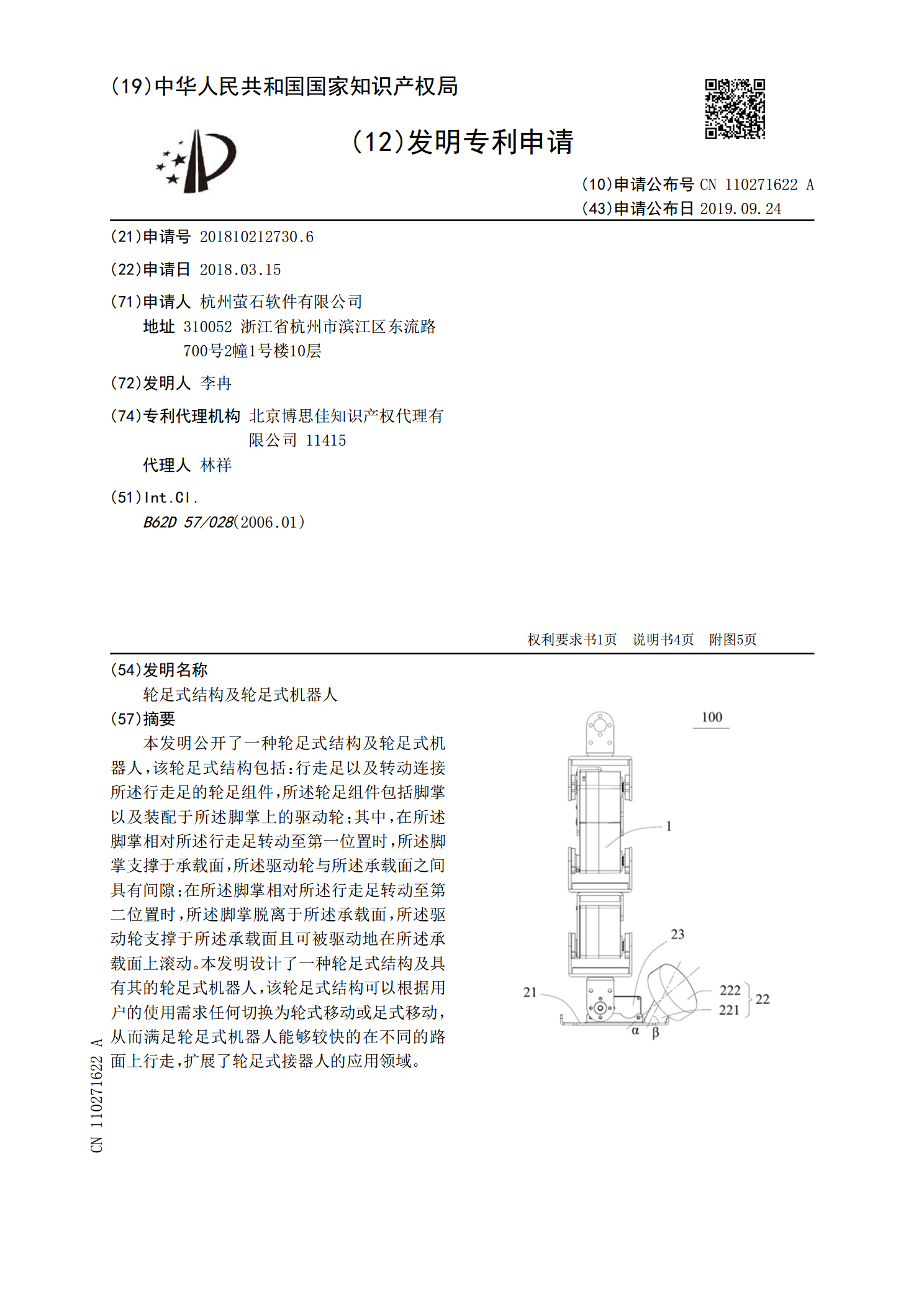
轮足式结构及轮足式机器人.pdf
本发明公开了一种轮足式结构及轮足式机器人,该轮足式结构包括:行走足以及转动连接所述行走足的轮足组件,所述轮足组件包括脚掌以及装配于所述脚掌上的驱动轮;其中,在所述脚掌相对所述行走足转动至第一位置时,所述脚掌支撑于承载面,所述驱动轮与所述承载面之间具有间隙;在所述脚掌相对所述行走足转动至第二位置时,所述脚掌脱离于所述承载面,所述驱动轮支撑于所述承载面且可被驱动地在所述承载面上滚动。本发明设计了一种轮足式结构及具有其的轮足式机器人,该轮足式结构可以根据用户的使用需求任何切换为轮式移动或足式移动,从而满足轮足式