
智能轮椅及其转向控制方法.pdf

猫巷****晓容


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能轮椅及其转向控制方法.pdf
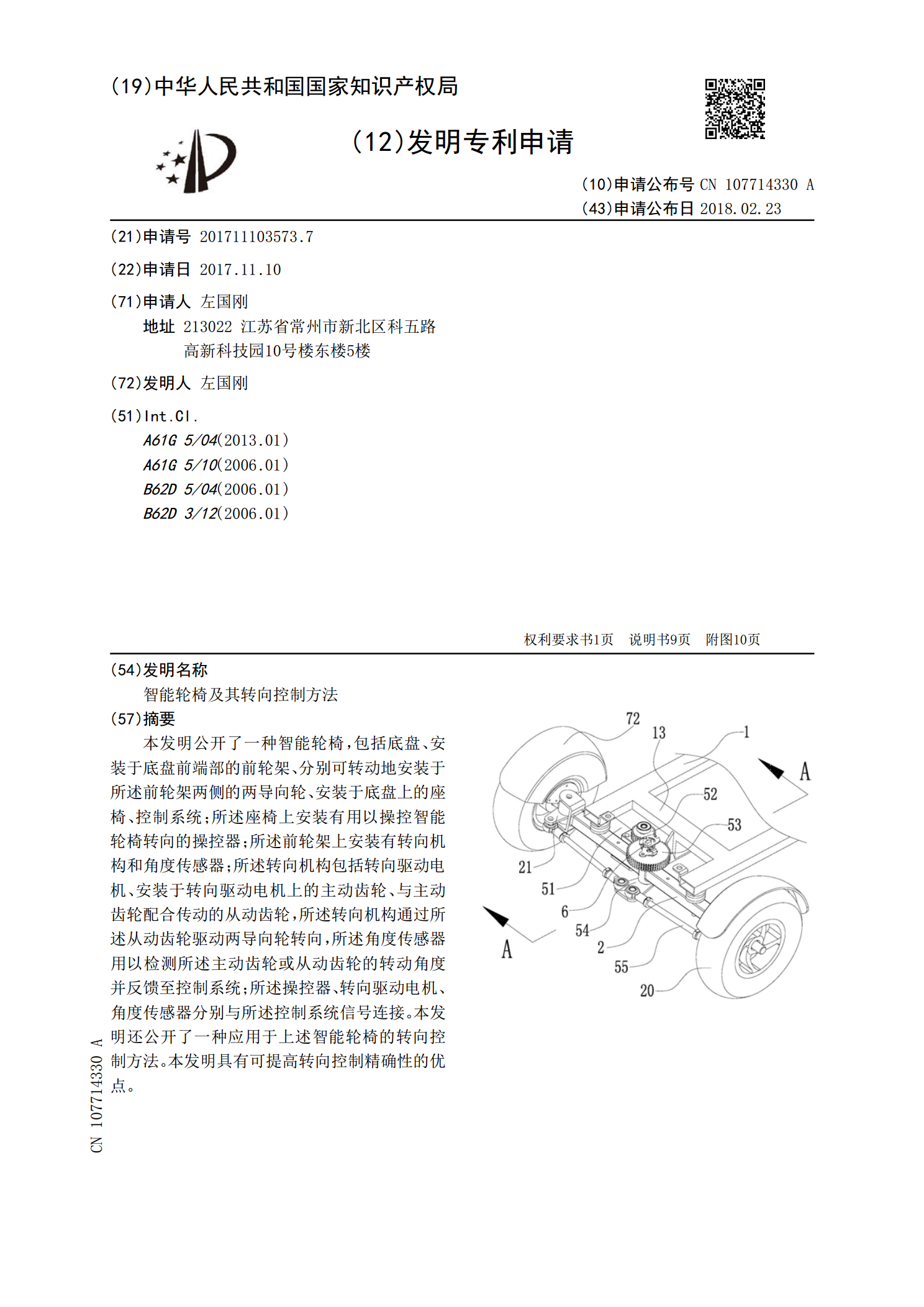
本发明公开了一种智能轮椅,包括底盘、安装于底盘前端部的前轮架、分别可转动地安装于所述前轮架两侧的两导向轮、安装于底盘上的座椅、控制系统;所述座椅上安装有用以操控智能轮椅转向的操控器;所述前轮架上安装有转向机构和角度传感器;所述转向机构包括转向驱动电机、安装于转向驱动电机上的主动齿轮、与主动齿轮配合传动的从动齿轮,所述转向机构通过所述从动齿轮驱动两导向轮转向,所述角度传感器用以检测所述主动齿轮或从动齿轮的转动角度并反馈至控制系统;所述操控器、转向驱动电机、角度传感器分别与所述控制系统信号连接。本发明还公开了

智能安全轮椅及其智能安全控制方法.pdf
本发明公开了一种智能安全轮椅,由双闭环控制系统控制驱动轮转速,以实现对速度的精确控制,同时提供使用者操纵杆控制和自主导航2种控制方式,自动避障及实时检测用户身体状况是否发生异常并采取相应保护措施的智能安全轮椅,以给老年人、残障人士的出行提供便捷与安全保障。与传统轮椅相比,该智能安全轮椅能够检测用户的身体状态,当判断用户身体状况异常时,及时发出警报,停止电机动作,安全性高,特别适合老年人以及残障人士使用。
智能轮椅及智能轮椅的控制方法.pdf
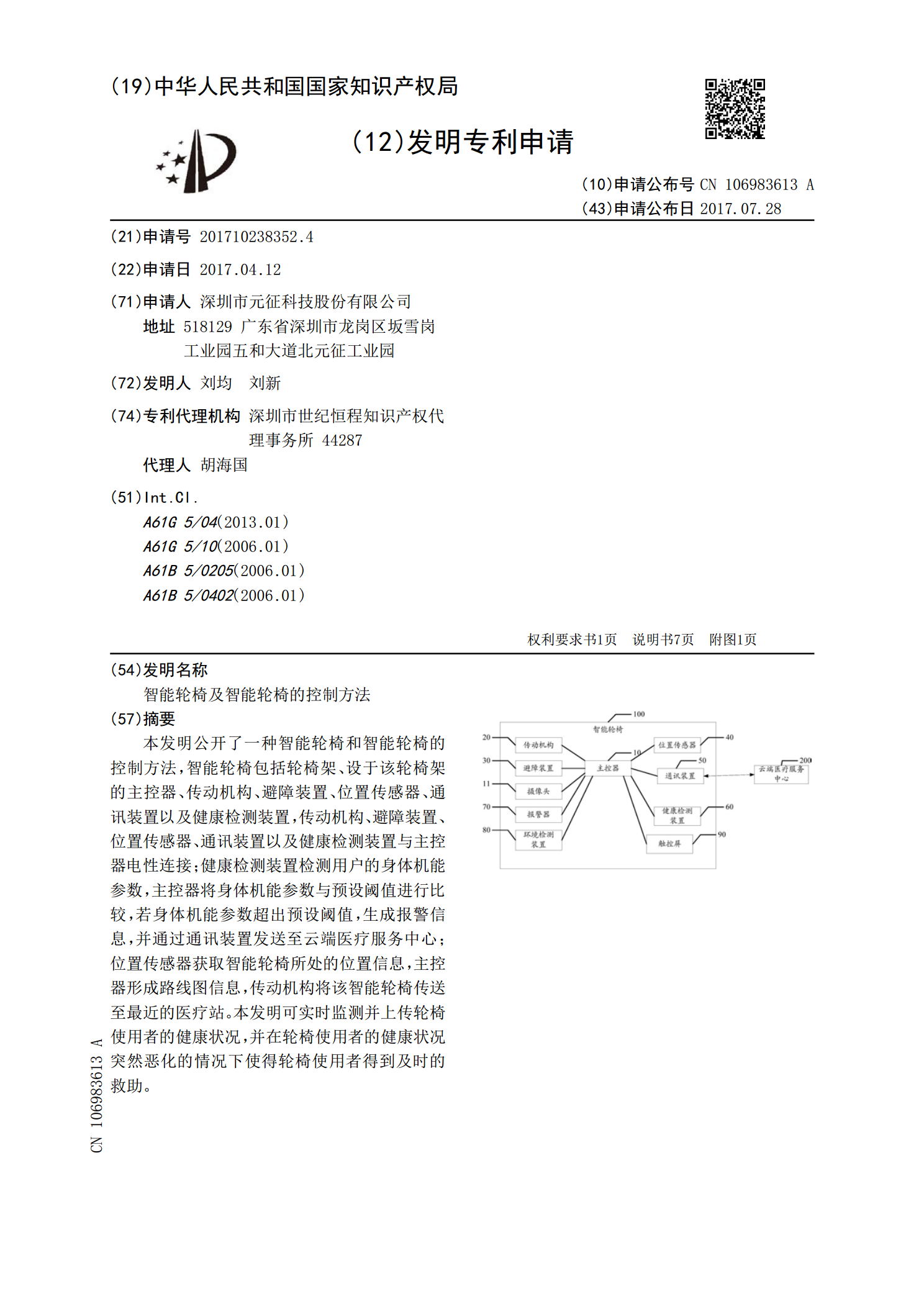
本发明公开了一种智能轮椅和智能轮椅的控制方法,智能轮椅包括轮椅架、设于该轮椅架的主控器、传动机构、避障装置、位置传感器、通讯装置以及健康检测装置,传动机构、避障装置、位置传感器、通讯装置以及健康检测装置与主控器电性连接;健康检测装置检测用户的身体机能参数,主控器将身体机能参数与预设阈值进行比较,若身体机能参数超出预设阈值,生成报警信息,并通过通讯装置发送至云端医疗服务中心;位置传感器获取智能轮椅所处的位置信息,主控器形成路线图信息,传动机构将该智能轮椅传送至最近的医疗站。本发明可实时监测并上传轮椅使用者的
一种智能轮椅及其控制方法.pdf
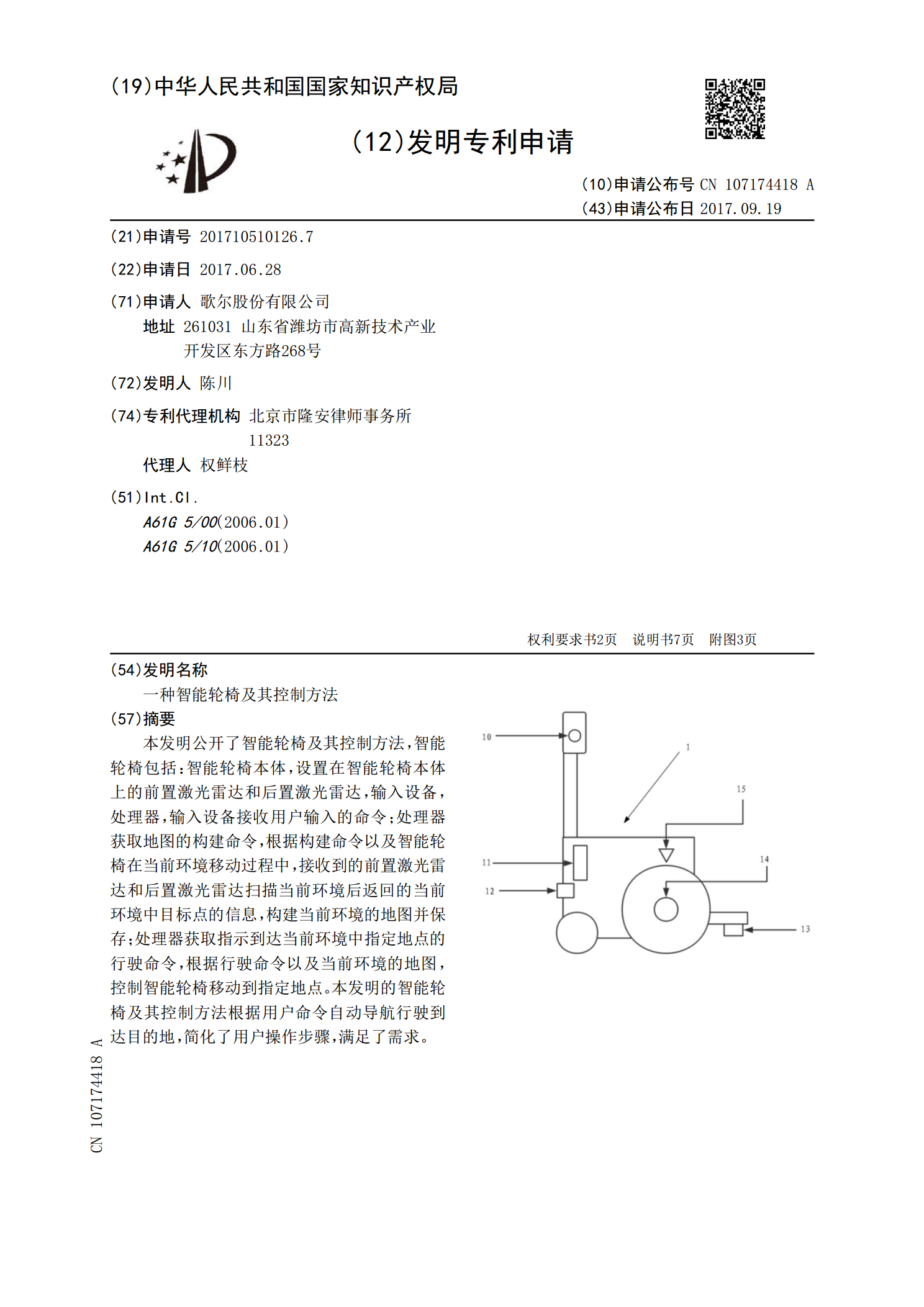
本发明公开了智能轮椅及其控制方法,智能轮椅包括:智能轮椅本体,设置在智能轮椅本体上的前置激光雷达和后置激光雷达,输入设备,处理器,输入设备接收用户输入的命令;处理器获取地图的构建命令,根据构建命令以及智能轮椅在当前环境移动过程中,接收到的前置激光雷达和后置激光雷达扫描当前环境后返回的当前环境中目标点的信息,构建当前环境的地图并保存;处理器获取指示到达当前环境中指定地点的行驶命令,根据行驶命令以及当前环境的地图,控制智能轮椅移动到指定地点。本发明的智能轮椅及其控制方法根据用户命令自动导航行驶到达目的地,简化

电动轮椅及其转向控制装置.pdf
本发明公开了一种电动轮椅及其转向控制装置,该电动轮椅包括支架、走行装置、座椅装置以及转向控制装置,支架包括前支架、后支架、主支架和座椅支架,走行装置包括一对前轮和一后轮,转向控制装置包括:闭合的具有一定强度的柔性连接件及对柔性连接件支撑和导向的三对导轮;柔性连接件缠绕并套设于后轮的转轴以带动后轮转向;从转轴延伸出的柔性连接件向前向外延伸至第一导轮,后向前至第二导轮;再向后至第三导轮,与第二导轮同轴心的连接有操作手柄,以通过操作操作手柄以带动柔性连接件沿缠绕于第二导轮;从第三导轮延伸出的柔性连接件水平延伸至