
一种车辆独立转向系统的实现方法.pdf

朋兴****en


1/9

2/9

3/9

4/9

5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种车辆独立转向系统的实现方法.pdf
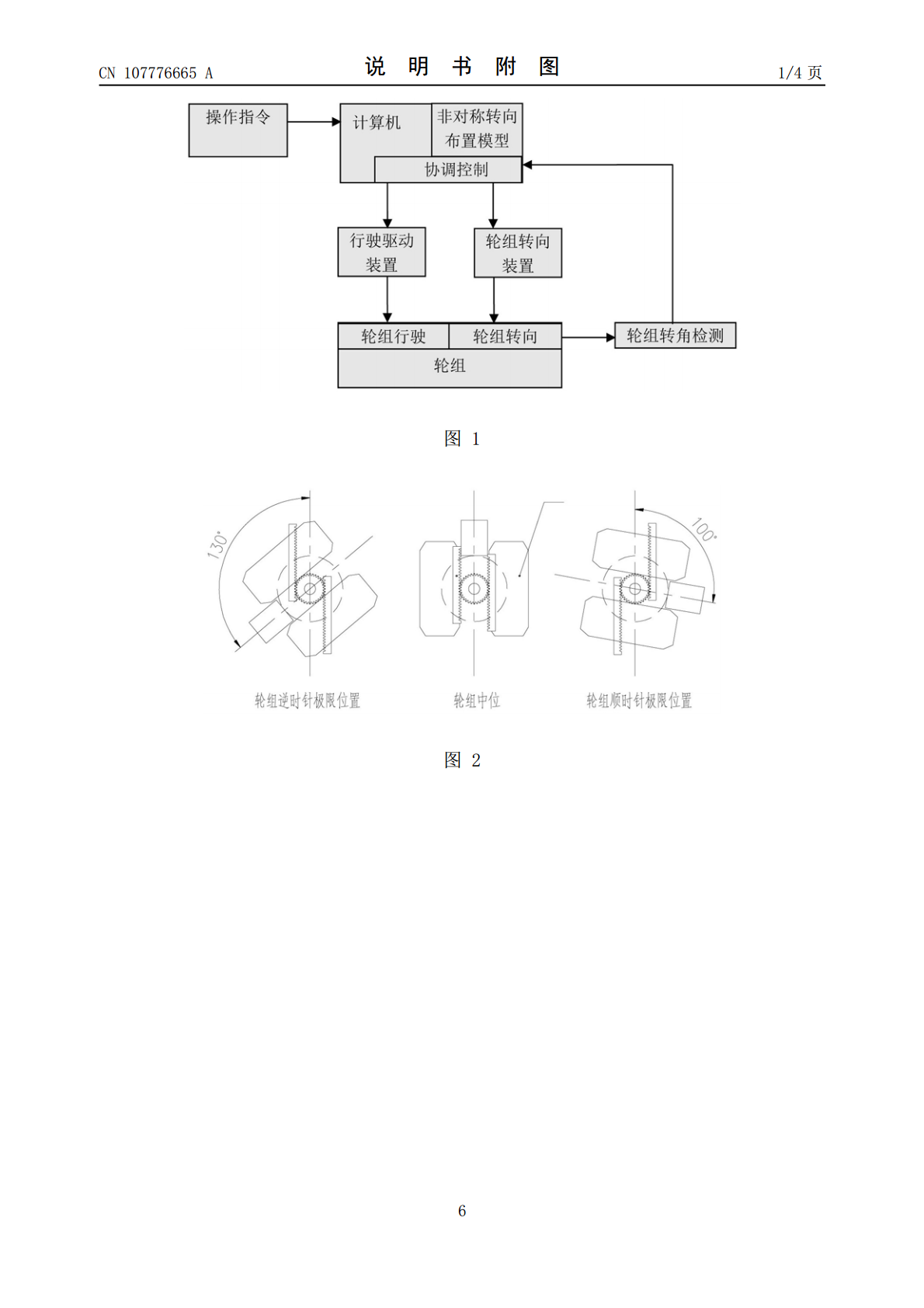
本发明提供一种车辆独立转向系统的实现方法,该系统包括设置于车辆下方的多个可独立转向的轮组、驱动轮组转向的转向装置、用于检测轮组实际转向角度的角度传感器、驱动轮组行驶的行驶驱动装置、用于协调控制轮组转角和行驶驱动的计算机,所述转向装置驱动轮组进行顺时针转向和逆时针转向的极限角度相对于中位是非对称的。本发明通过转向装置实现轮组转向能力相对于中位的非对称性,以及轮组的独立转向,并通过计算机对轮组转角和行驶方向的协调控制,使车辆具有了更大的转角范围,在基本不增加硬件成本的基础上大幅提高了车辆的转向灵活性。

一种四轮独立转向-独立驱动车辆轨迹跟踪方法和系统.pdf
本发明提供一种四轮独立转向‑独立驱动车辆轨迹跟踪方法和系统。该方法包括:在目标轨迹上选择同时满足前探距离约束和径向距离约束的点作为前探点,其中,所述径向距离约束是径向距离系数和横向误差之间的乘积,所述横向误差是所述目标轨迹上与车身基准点之间的最短距离;根据所述前探点和车身当前的位置关系,拟合出一条经过所述前探点和车身基准点的圆弧轨迹并计算圆弧轨迹的半径;根据设定车速和所述圆弧轨迹半径计算出车身基准点处的角速度;根据车身基准点处的角速度和线速度获得车轮的转速控制量和转角控制量以控制车辆沿所述目标轨迹行进。本

一种车辆转向系统和转向方法.pdf
一种车辆转向系统和转向方法,转向系统包括:前轮转向装置,后轮转向装置,转向域控制器以及车辆控制器,车辆控制器用于向转向域控制器输出零半径转向指令或四轮转向指令,当输出零半径转向指令时,转向域控制器可控制两个前轮转动传动组件和两个后轮转动传动组件均输出不同转向的旋转运动,当输出四轮转向指令时,转向域控制器可控制两个前轮转动传动组件均输出相同转向的旋转运动,控制两个后轮转动传动组件均输出相同转向的旋转运动。本车辆转向系统能够实现零半径转向模式或者四轮转向模式等多模式、多功能的转向功能,以提高车辆行驶安全性。
一种车辆的转向控制方法、转向控制系统及车辆.pdf
本发明提供了一种车辆的转向控制方法、转向控制系统及车辆,涉及车辆底盘技术领域。本发明先获取各节车厢的转向工况;然后针对处于直线工况的第一目标车厢,根据车辆开始转向时该节车厢的轴线与预设的二维坐标系中X轴之间的初始夹角、以及该节车厢的横向角速度,确定该节车厢的轴线与X轴之间的当前夹角;最后根据当前夹角计算该节车厢中从动轴的第一目标车轮转向角,并控制该从动轴按照第一目标车轮转向角转向。本发明通过控制该节车厢中从动轴的每一时刻的第一目标车轮转向角,实现了同一车厢中从动轴跟随驱动轴的轨迹进行转弯,避免出现多车厢车

单轴独立驱动铰接转向车辆差动协同转向系统及其控制方法.pdf
本发明公开了单轴独立驱动铰接转向车辆差动协同转向系统,通过与铰接转向车辆原有的液压转向系统相互配合,能有效的提高铰接转向车辆的转向灵活性,降低转向能耗。本发明还公开了单轴独立驱动铰接转向车辆差动协同转向系统的控制方法,根据方向盘角速度采用比例控制器计算出合适的差动转矩施加到驱动轴左右两侧驱动轮上,使一侧驱动轮转矩增加的同时另一侧驱动轮转矩减小,从而形成一个直接横摆力矩,与液压转向系统协同作用实现车辆转向。从而达到减少转向时间,降低液压转向系统能耗的目的。