
单轴独立驱动铰接转向车辆差动协同转向系统及其控制方法.pdf

和裕****az

1/10
2/10
3/10
4/10
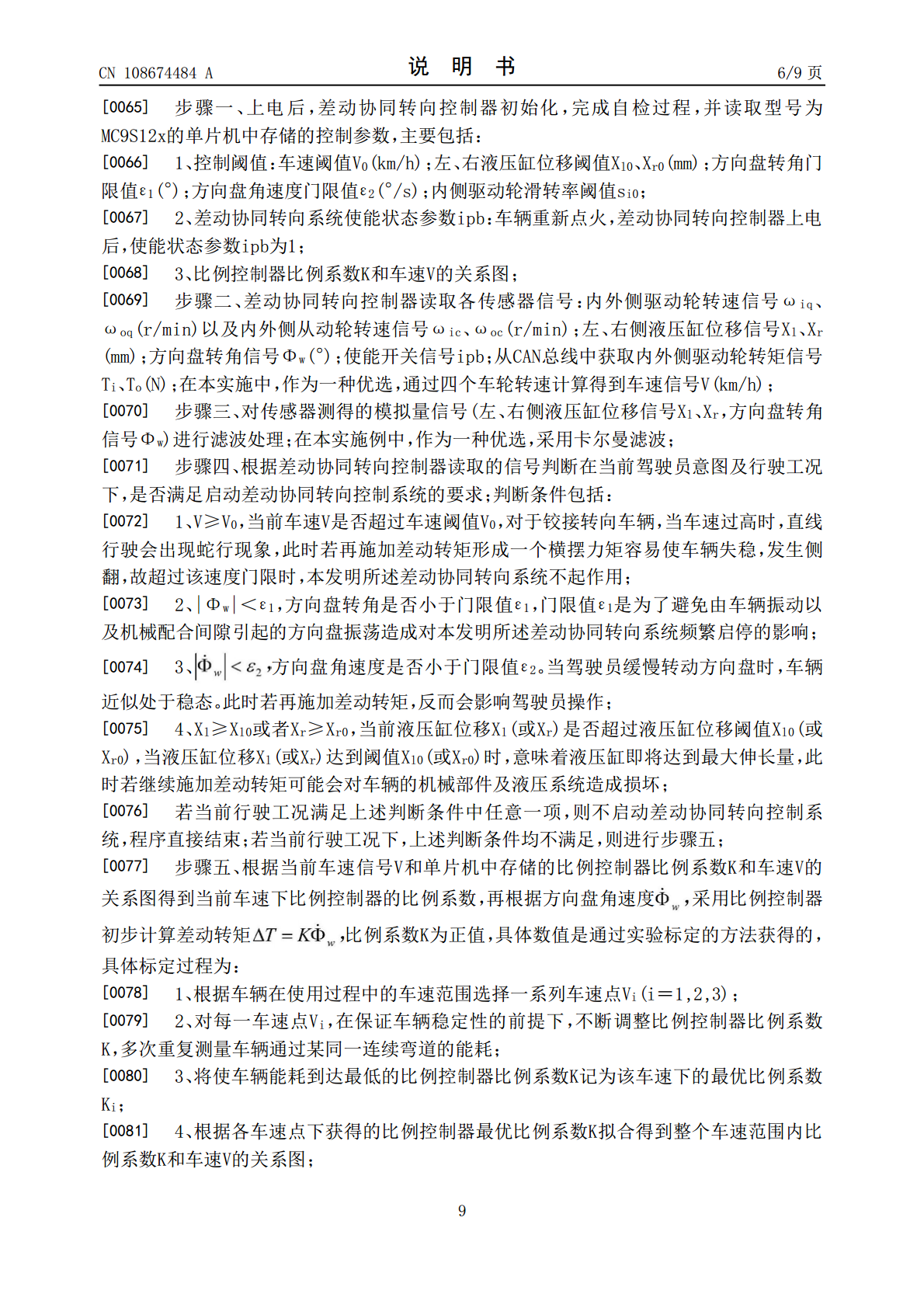
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单轴独立驱动铰接转向车辆差动协同转向系统及其控制方法.pdf
本发明公开了单轴独立驱动铰接转向车辆差动协同转向系统,通过与铰接转向车辆原有的液压转向系统相互配合,能有效的提高铰接转向车辆的转向灵活性,降低转向能耗。本发明还公开了单轴独立驱动铰接转向车辆差动协同转向系统的控制方法,根据方向盘角速度采用比例控制器计算出合适的差动转矩施加到驱动轴左右两侧驱动轮上,使一侧驱动轮转矩增加的同时另一侧驱动轮转矩减小,从而形成一个直接横摆力矩,与液压转向系统协同作用实现车辆转向。从而达到减少转向时间,降低液压转向系统能耗的目的。
一种兼具铰接转向和转向梯形转向的全轮独立驱动铰接车辆差动协同转向系统及其控制方法.pdf
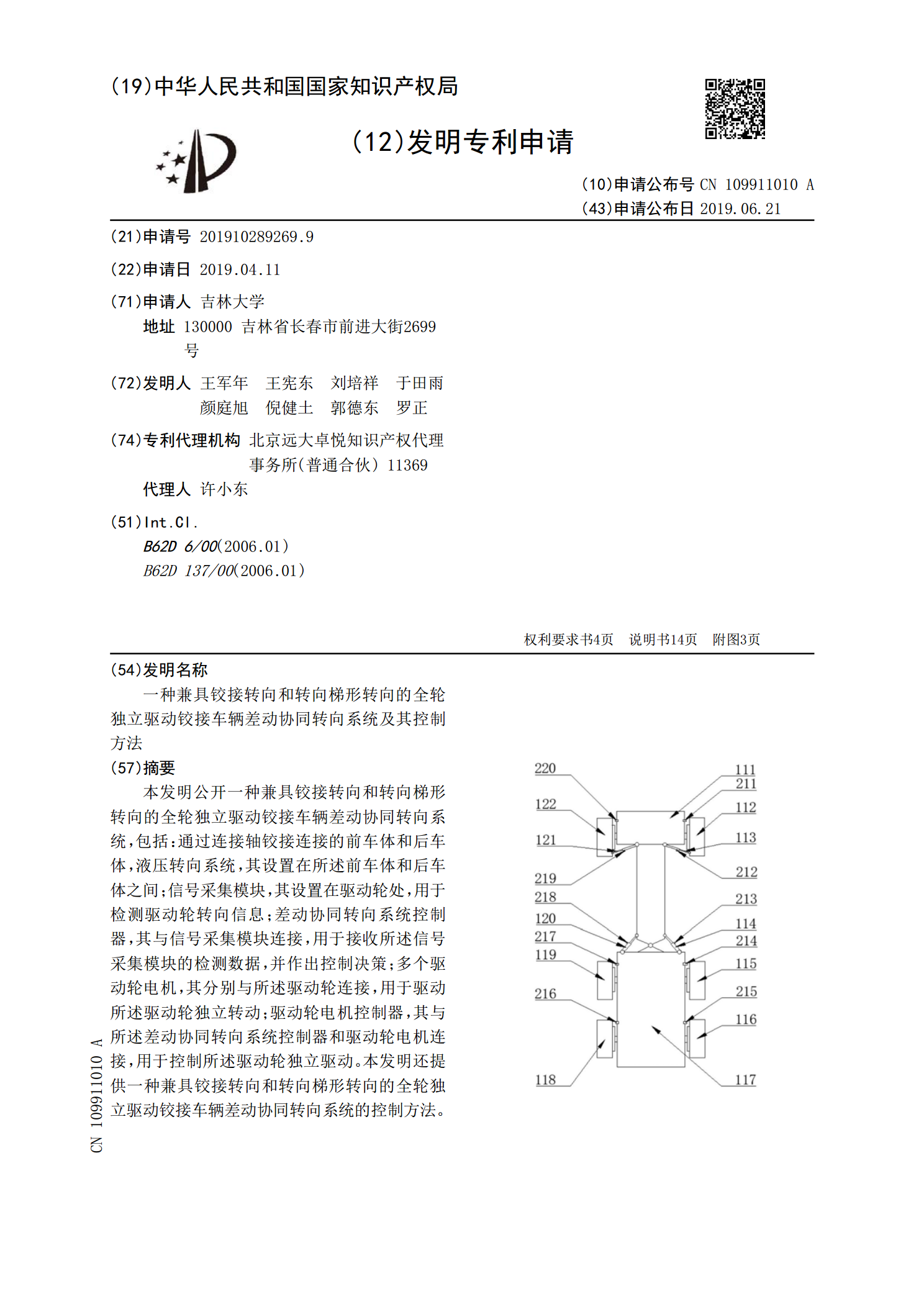
本发明公开一种兼具铰接转向和转向梯形转向的全轮独立驱动铰接车辆差动协同转向系统,包括:通过连接轴铰接连接的前车体和后车体,液压转向系统,其设置在所述前车体和后车体之间;信号采集模块,其设置在驱动轮处,用于检测驱动轮转向信息;差动协同转向系统控制器,其与信号采集模块连接,用于接收所述信号采集模块的检测数据,并作出控制决策;多个驱动轮电机,其分别与所述驱动轮连接,用于驱动所述驱动轮独立转动;驱动轮电机控制器,其与所述差动协同转向系统控制器和驱动轮电机连接,用于控制所述驱动轮独立驱动。本发明还提供一种兼具铰接转

电动轮前轴独立驱动汽车差动协同主动转向系统及其控制方法.pdf
本发明公开了一种电动轮前轴独立驱动汽车差动协同主动转向系统,包括:转向齿条,其设置在左转向轮和右转向轮之间,能够产生横向位移,并拉动所述左转向轮和所述右转向轮转向;行星齿轮机构,其包括:第一输入端、第二输入端和输出端,其中所述输出端连接所述转向齿条,能够驱动所述转向齿条产生横向位移;转角耦合电机,其输出轴连接所述第一输入端;转向盘输入轴,其连接所述第二输入端;其中,所述的行星齿轮机构能够实现转向盘输入轴的输入转角和转角耦合电机的输入转角之间的耦合;左轮边独立驱动系统和右轮边独立驱动系统,实现车辆的驱动并提
用于轮式独立驱动车辆的线控差动转向系统及其控制方法.pdf
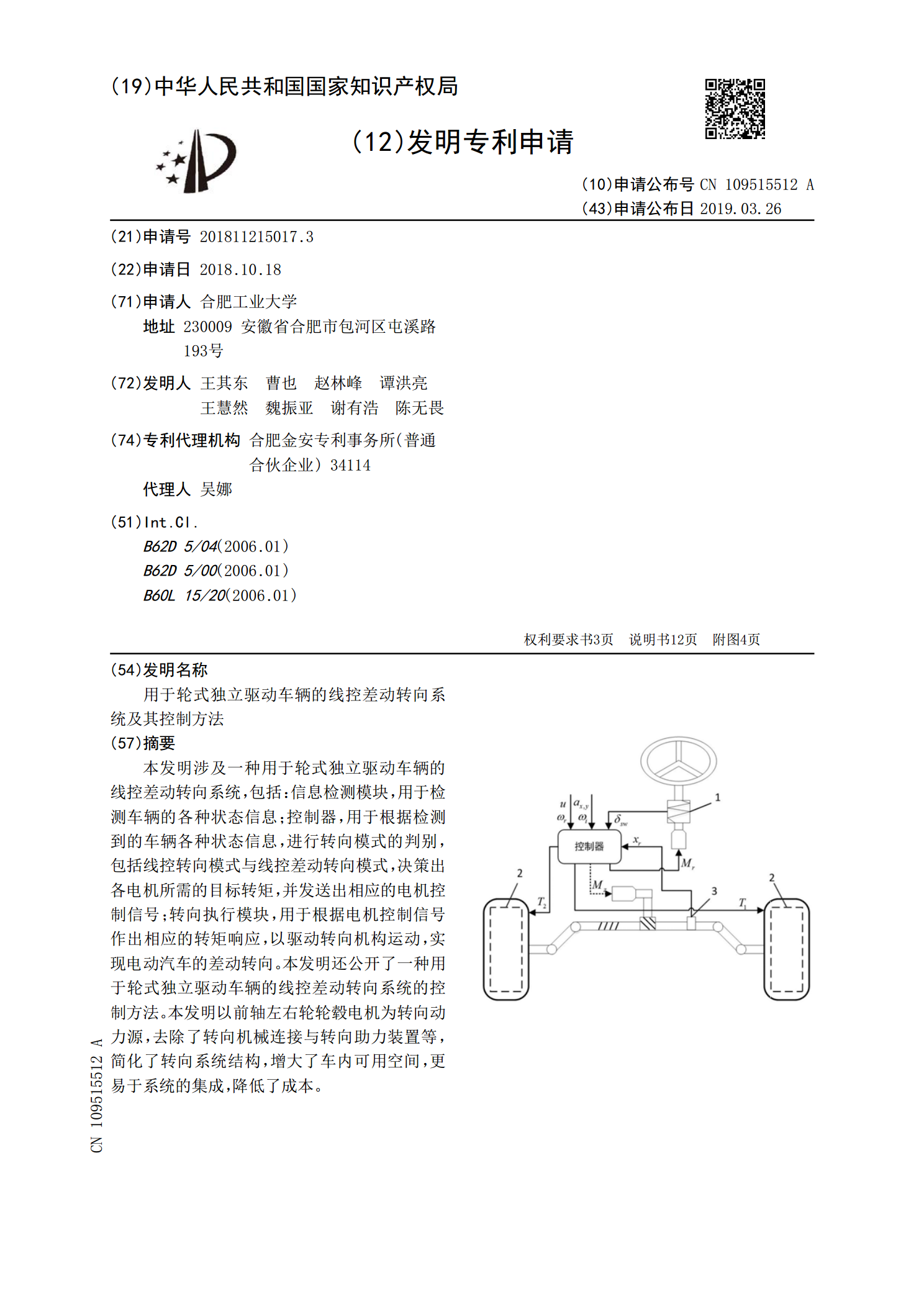
本发明涉及一种用于轮式独立驱动车辆的线控差动转向系统,包括:信息检测模块,用于检测车辆的各种状态信息;控制器,用于根据检测到的车辆各种状态信息,进行转向模式的判别,包括线控转向模式与线控差动转向模式,决策出各电机所需的目标转矩,并发送出相应的电机控制信号;转向执行模块,用于根据电机控制信号作出相应的转矩响应,以驱动转向机构运动,实现电动汽车的差动转向。本发明还公开了一种用于轮式独立驱动车辆的线控差动转向系统的控制方法。本发明以前轴左右轮轮毂电机为转向动力源,去除了转向机械连接与转向助力装置等,简化了转向系
一种分布驱动铰接车的独立差动转向方法.pdf
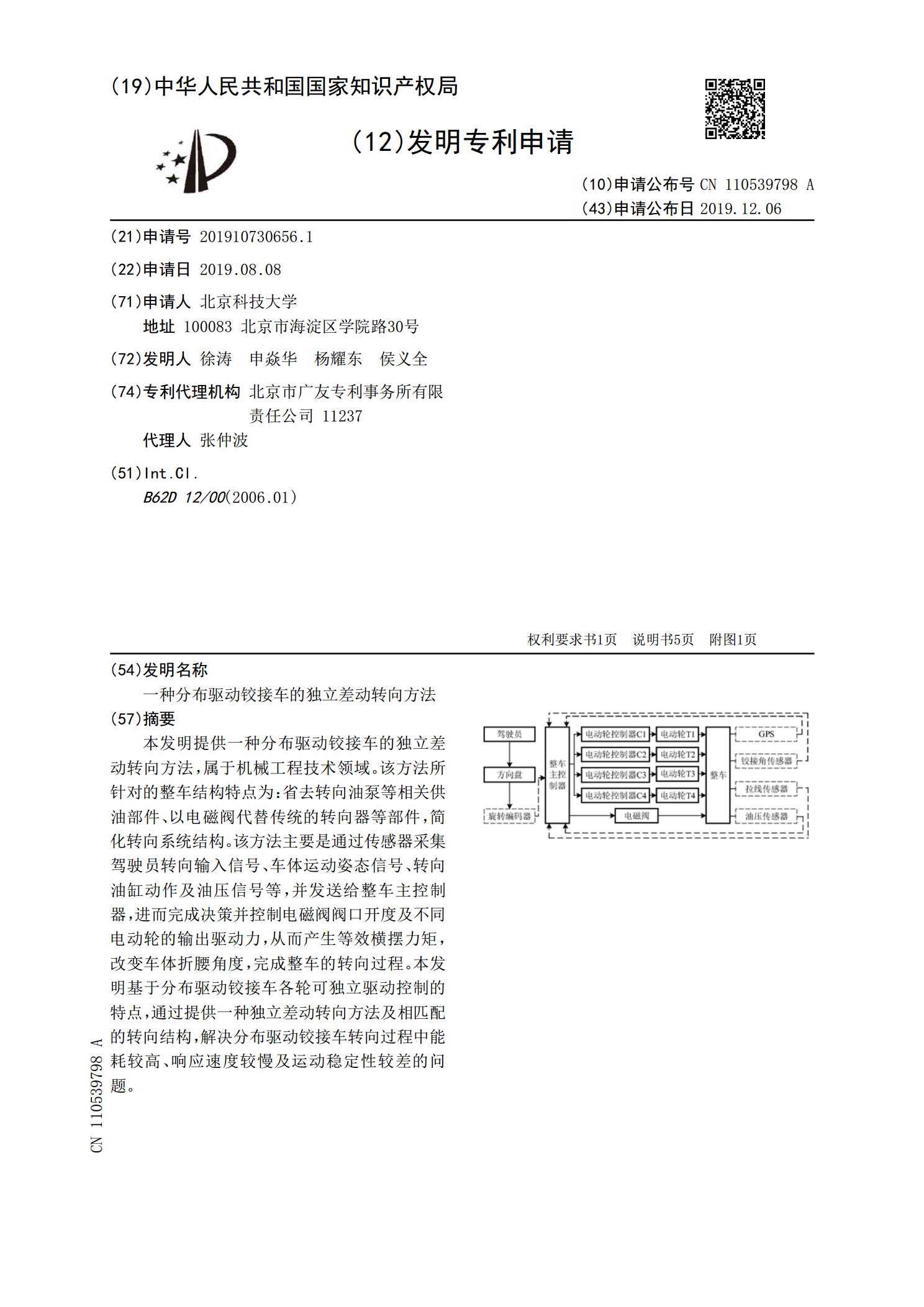
本发明提供一种分布驱动铰接车的独立差动转向方法,属于机械工程技术领域。该方法所针对的整车结构特点为:省去转向油泵等相关供油部件、以电磁阀代替传统的转向器等部件,简化转向系统结构。该方法主要是通过传感器采集驾驶员转向输入信号、车体运动姿态信号、转向油缸动作及油压信号等,并发送给整车主控制器,进而完成决策并控制电磁阀阀口开度及不同电动轮的输出驱动力,从而产生等效横摆力矩,改变车体折腰角度,完成整车的转向过程。本发明基于分布驱动铰接车各轮可独立驱动控制的特点,通过提供一种独立差动转向方法及相匹配的转向结构,解决