
一种四轮独立转向-独立驱动车辆轨迹跟踪方法和系统.pdf

邻家****ng

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种四轮独立转向-独立驱动车辆轨迹跟踪方法和系统.pdf
本发明提供一种四轮独立转向‑独立驱动车辆轨迹跟踪方法和系统。该方法包括:在目标轨迹上选择同时满足前探距离约束和径向距离约束的点作为前探点,其中,所述径向距离约束是径向距离系数和横向误差之间的乘积,所述横向误差是所述目标轨迹上与车身基准点之间的最短距离;根据所述前探点和车身当前的位置关系,拟合出一条经过所述前探点和车身基准点的圆弧轨迹并计算圆弧轨迹的半径;根据设定车速和所述圆弧轨迹半径计算出车身基准点处的角速度;根据车身基准点处的角速度和线速度获得车轮的转速控制量和转角控制量以控制车辆沿所述目标轨迹行进。本
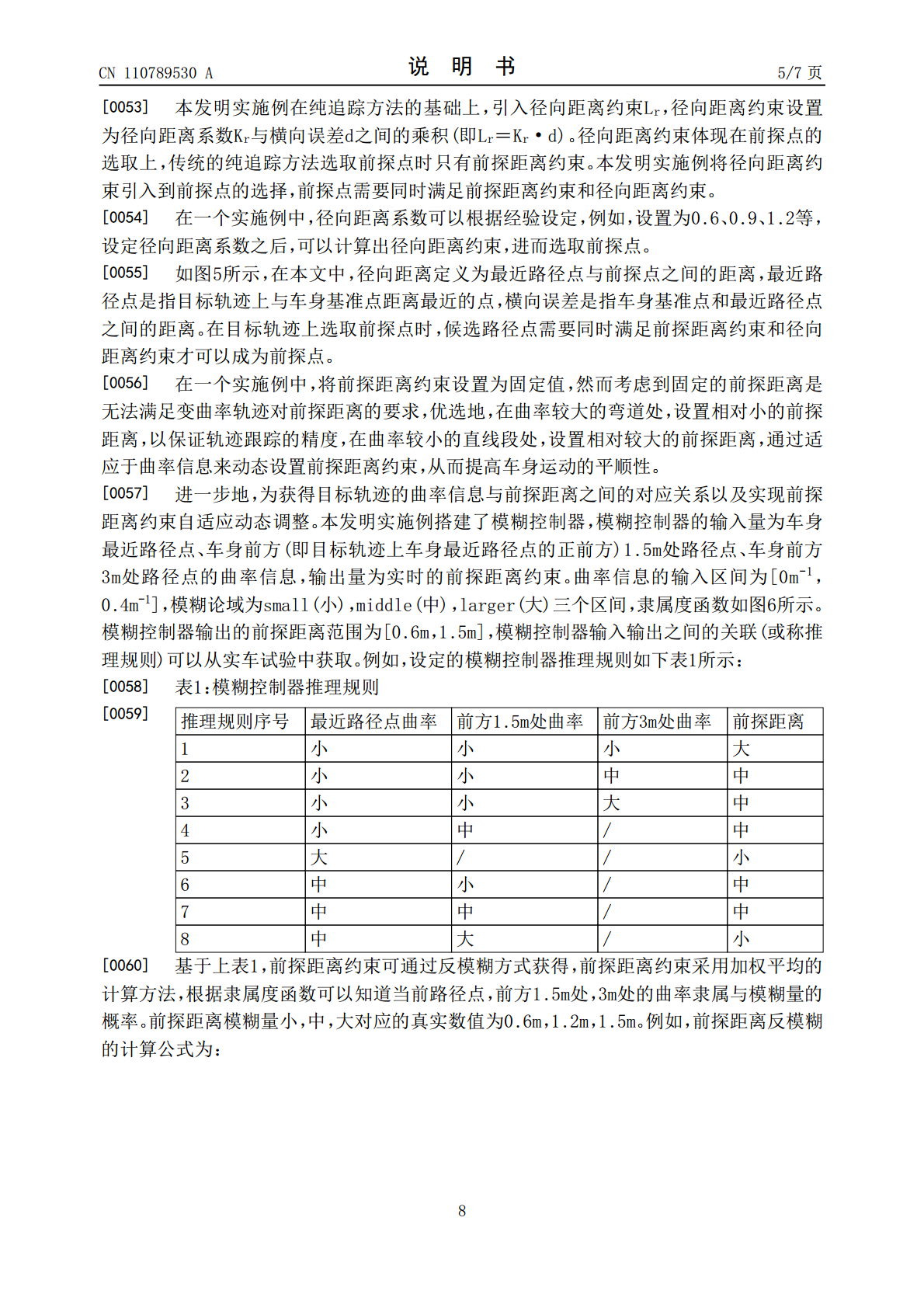
六轮独立驱动独立转向机器人复杂地形轨迹跟踪控制方法.pdf
一种六轮独立驱动独立转向机器人复杂地形轨迹跟踪控制方法,包括以下步骤:S1建立空间坐标系和机器人的运动学模型;S2分析机器人的航向角偏差,使机器人朝向与轨迹起始点朝向一致;S3计算得到输出的控制量信息;S4进行首次轨迹跟踪控制;S5将机器人单轮实际移动速度、轮胎受力情况和机器人质心与轨迹的偏移量作为反馈量发送至控制器,进行优化控制;S6将质心与轨迹偏移量和单轮移动速度与理论速度的偏差输入至优化模块;S7将计算后的单轮移动速度和转向角度发送至单轮控制器;S8机器人位置更新,实现机器人的轨迹跟踪控制。该方法通

独立驱动、转向和悬架系统.pdf
本发明提供了一种独立驱动、转向和悬架系统,其包括:轮内电机,其用于驱动车轮旋转;轮毂单元,其用于支撑车轮和所述轮内电机旋转;第一转向节,其用于支撑所述轮毂单元,并可绕由第一主销形成的第一主销轴线转动;弹簧减震器,其用于支撑车轮上下跳动;下横臂,其用于车轮上下跳动时导向;第二转向节,其用于支撑所述第一主销,并可绕由弹簧减震器上支点和下横臂球铰形成的第二主销轴线转动;第一转向执行器,其用于驱动所述第一转向节转动;以及第二转向执行器,其用于驱动所述第二转向节转动。

单轴独立驱动铰接转向车辆差动协同转向系统及其控制方法.pdf
本发明公开了单轴独立驱动铰接转向车辆差动协同转向系统,通过与铰接转向车辆原有的液压转向系统相互配合,能有效的提高铰接转向车辆的转向灵活性,降低转向能耗。本发明还公开了单轴独立驱动铰接转向车辆差动协同转向系统的控制方法,根据方向盘角速度采用比例控制器计算出合适的差动转矩施加到驱动轴左右两侧驱动轮上,使一侧驱动轮转矩增加的同时另一侧驱动轮转矩减小,从而形成一个直接横摆力矩,与液压转向系统协同作用实现车辆转向。从而达到减少转向时间,降低液压转向系统能耗的目的。
一种车辆独立转向系统的实现方法.pdf
本发明提供一种车辆独立转向系统的实现方法,该系统包括设置于车辆下方的多个可独立转向的轮组、驱动轮组转向的转向装置、用于检测轮组实际转向角度的角度传感器、驱动轮组行驶的行驶驱动装置、用于协调控制轮组转角和行驶驱动的计算机,所述转向装置驱动轮组进行顺时针转向和逆时针转向的极限角度相对于中位是非对称的。本发明通过转向装置实现轮组转向能力相对于中位的非对称性,以及轮组的独立转向,并通过计算机对轮组转角和行驶方向的协调控制,使车辆具有了更大的转角范围,在基本不增加硬件成本的基础上大幅提高了车辆的转向灵活性。