
自移动机器人.pdf

Ch****75

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自移动机器人.pdf
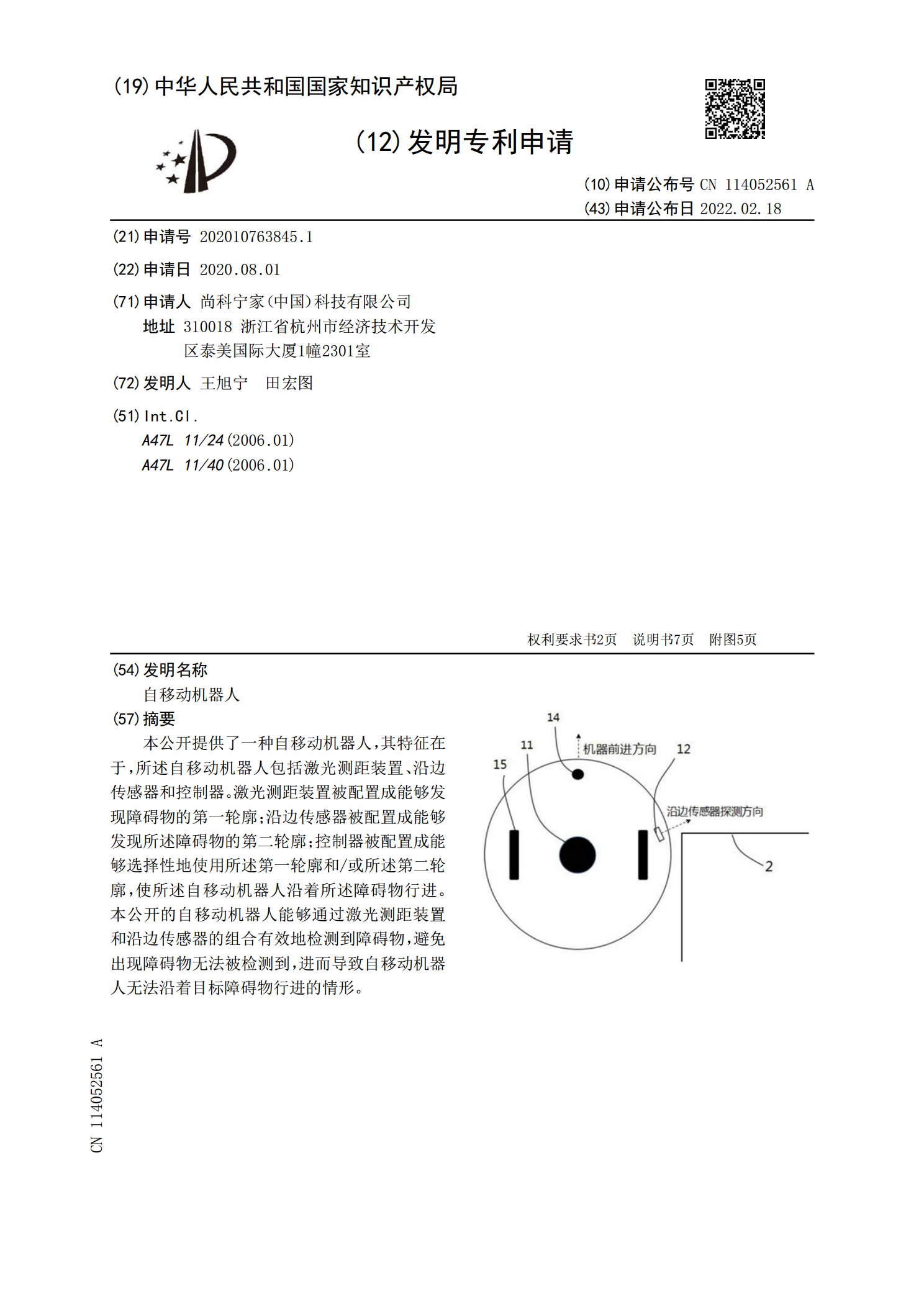
本公开提供了一种自移动机器人,其特征在于,所述自移动机器人包括激光测距装置、沿边传感器和控制器。激光测距装置被配置成能够发现障碍物的第一轮廓;沿边传感器被配置成能够发现所述障碍物的第二轮廓;控制器被配置成能够选择性地使用所述第一轮廓和/或所述第二轮廓,使所述自移动机器人沿着所述障碍物行进。本公开的自移动机器人能够通过激光测距装置和沿边传感器的组合有效地检测到障碍物,避免出现障碍物无法被检测到,进而导致自移动机器人无法沿着目标障碍物行进的情形。
自移动机器人.pdf
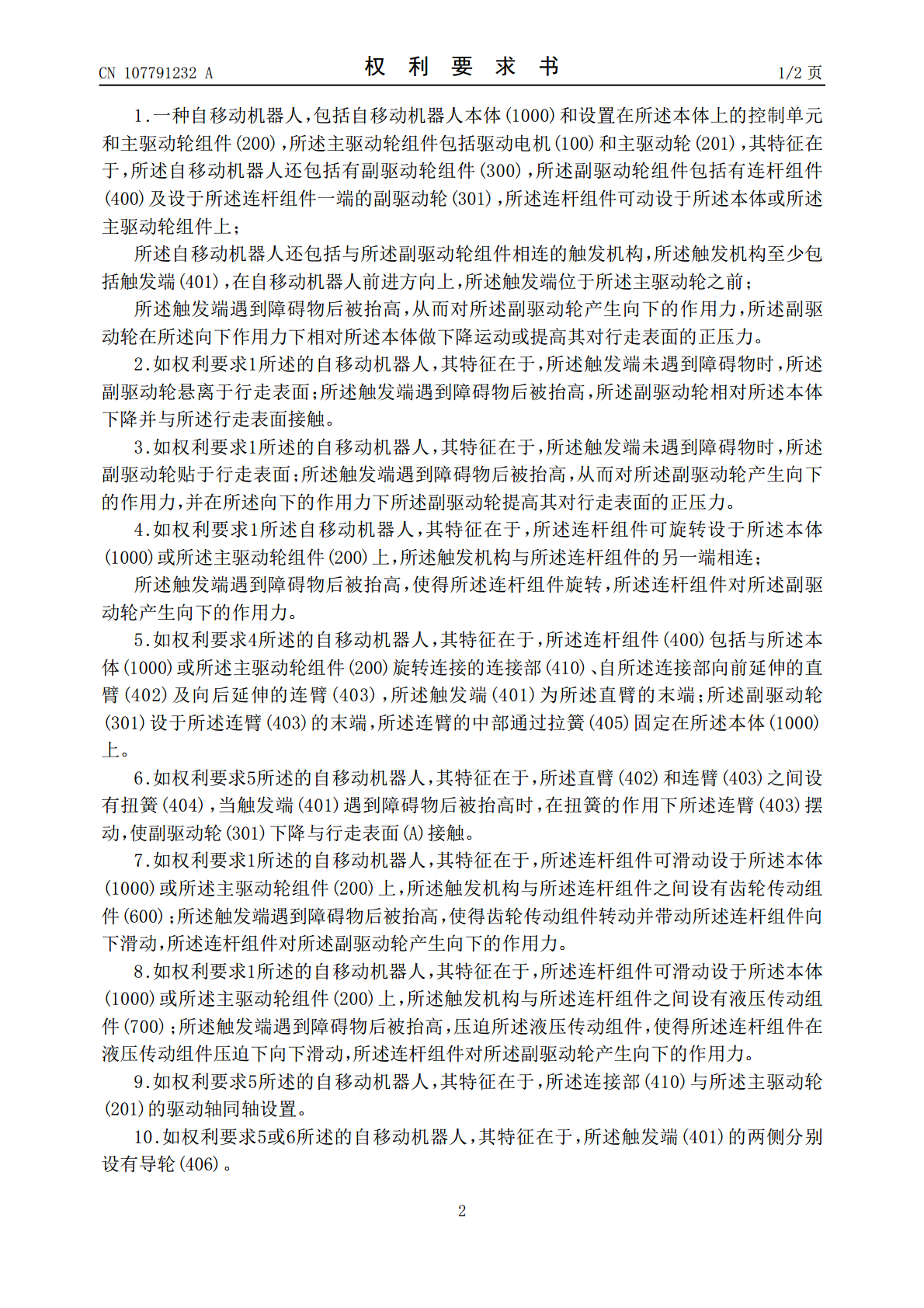
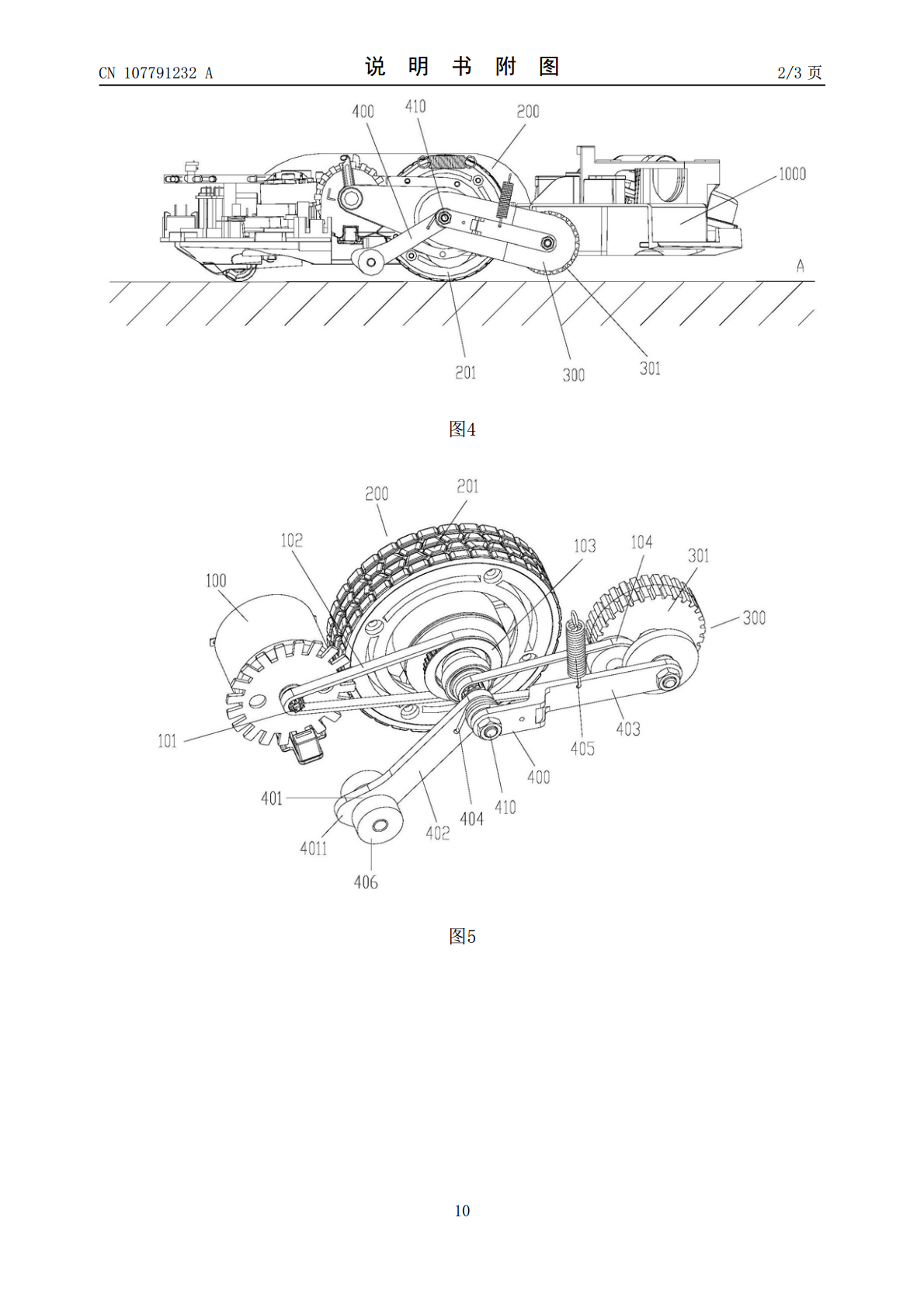
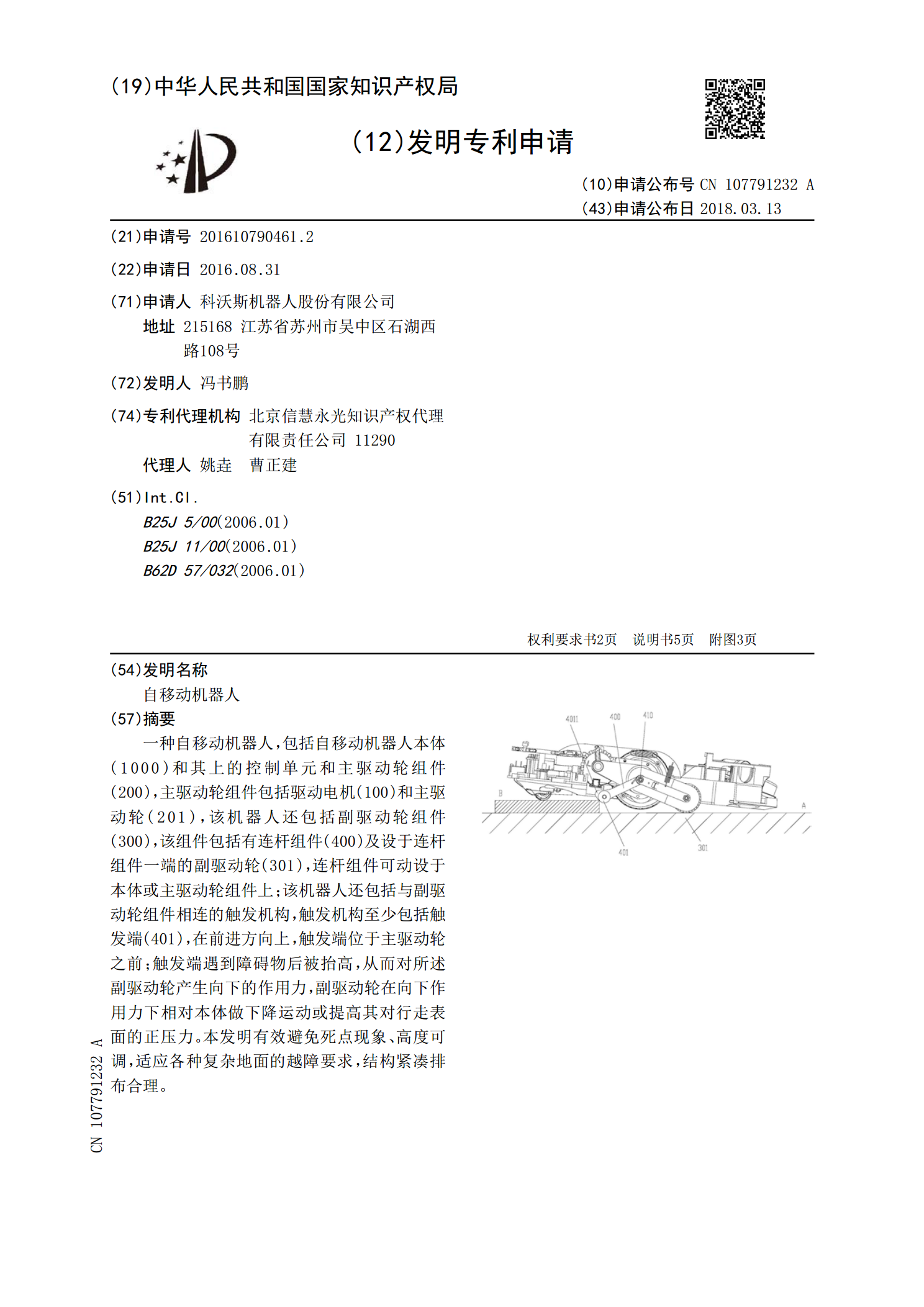
一种自移动机器人,包括自移动机器人本体(1000)和其上的控制单元和主驱动轮组件(200),主驱动轮组件包括驱动电机(100)和主驱动轮(201),该机器人还包括副驱动轮组件(300),该组件包括有连杆组件(400)及设于连杆组件一端的副驱动轮(301),连杆组件可动设于本体或主驱动轮组件上;该机器人还包括与副驱动轮组件相连的触发机构,触发机构至少包括触发端(401),在前进方向上,触发端位于主驱动轮之前;触发端遇到障碍物后被抬高,从而对所述副驱动轮产生向下的作用力,副驱动轮在向下作用力下相对本体做下降运
自移动机器人行走装置、自移动机器人及其行走方法.pdf
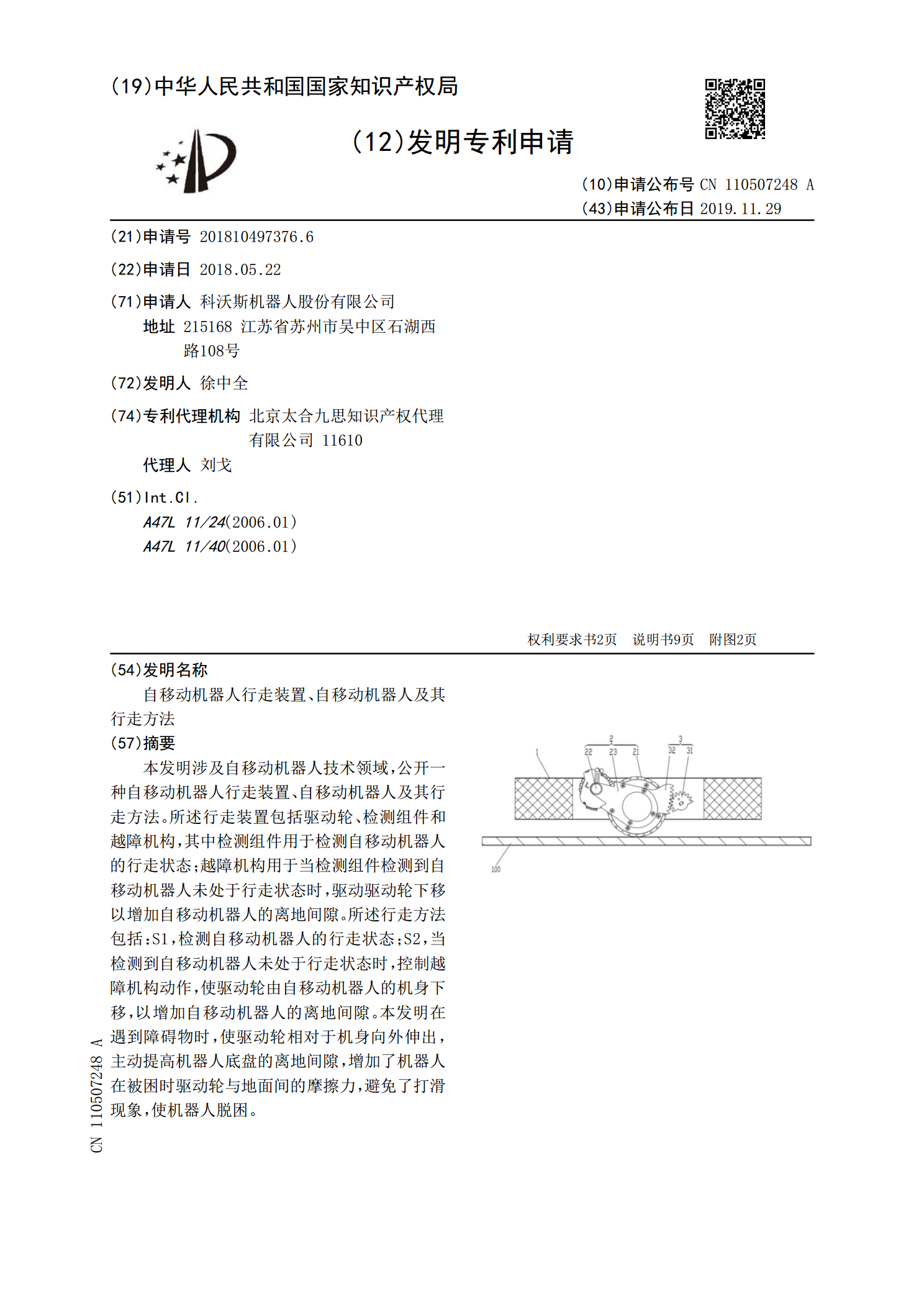
本发明涉及自移动机器人技术领域,公开一种自移动机器人行走装置、自移动机器人及其行走方法。所述行走装置包括驱动轮、检测组件和越障机构,其中检测组件用于检测自移动机器人的行走状态;越障机构用于当检测组件检测到自移动机器人未处于行走状态时,驱动驱动轮下移以增加自移动机器人的离地间隙。所述行走方法包括:S1,检测自移动机器人的行走状态;S2,当检测到自移动机器人未处于行走状态时,控制越障机构动作,使驱动轮由自移动机器人的机身下移,以增加自移动机器人的离地间隙。本发明在遇到障碍物时,使驱动轮相对于机身向外伸出,主动
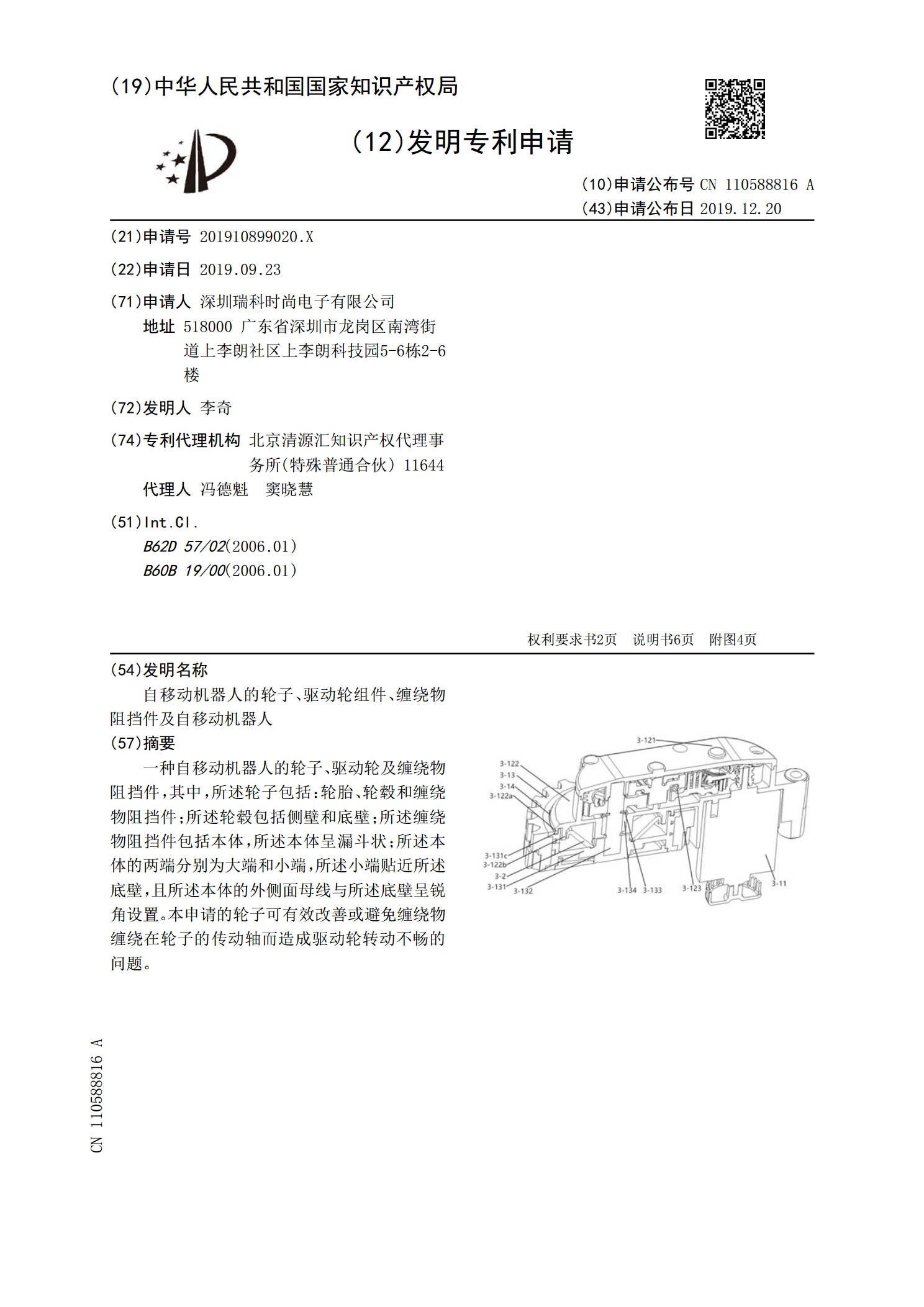
自移动机器人的轮子、驱动轮组件、缠绕物阻挡件及自移动机器人.pdf
一种自移动机器人的轮子、驱动轮及缠绕物阻挡件,其中,所述轮子包括:轮胎、轮毂和缠绕物阻挡件;所述轮毂包括侧壁和底壁;所述缠绕物阻挡件包括本体,所述本体呈漏斗状;所述本体的两端分别为大端和小端,所述小端贴近所述底壁,且所述本体的外侧面母线与所述底壁呈锐角设置。本申请的轮子可有效改善或避免缠绕物缠绕在轮子的传动轴而造成驱动轮转动不畅的问题。
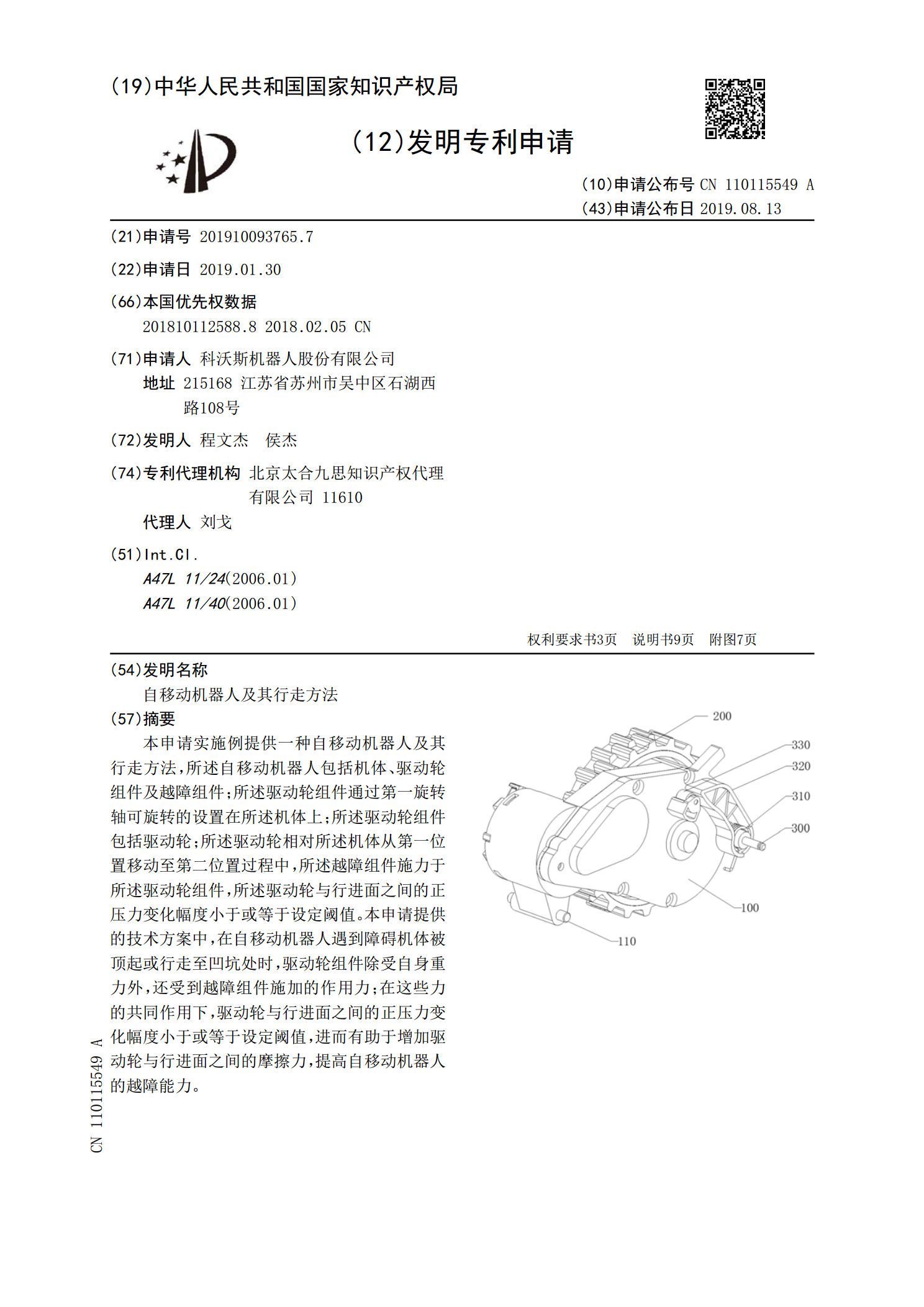
自移动机器人及其行走方法.pdf
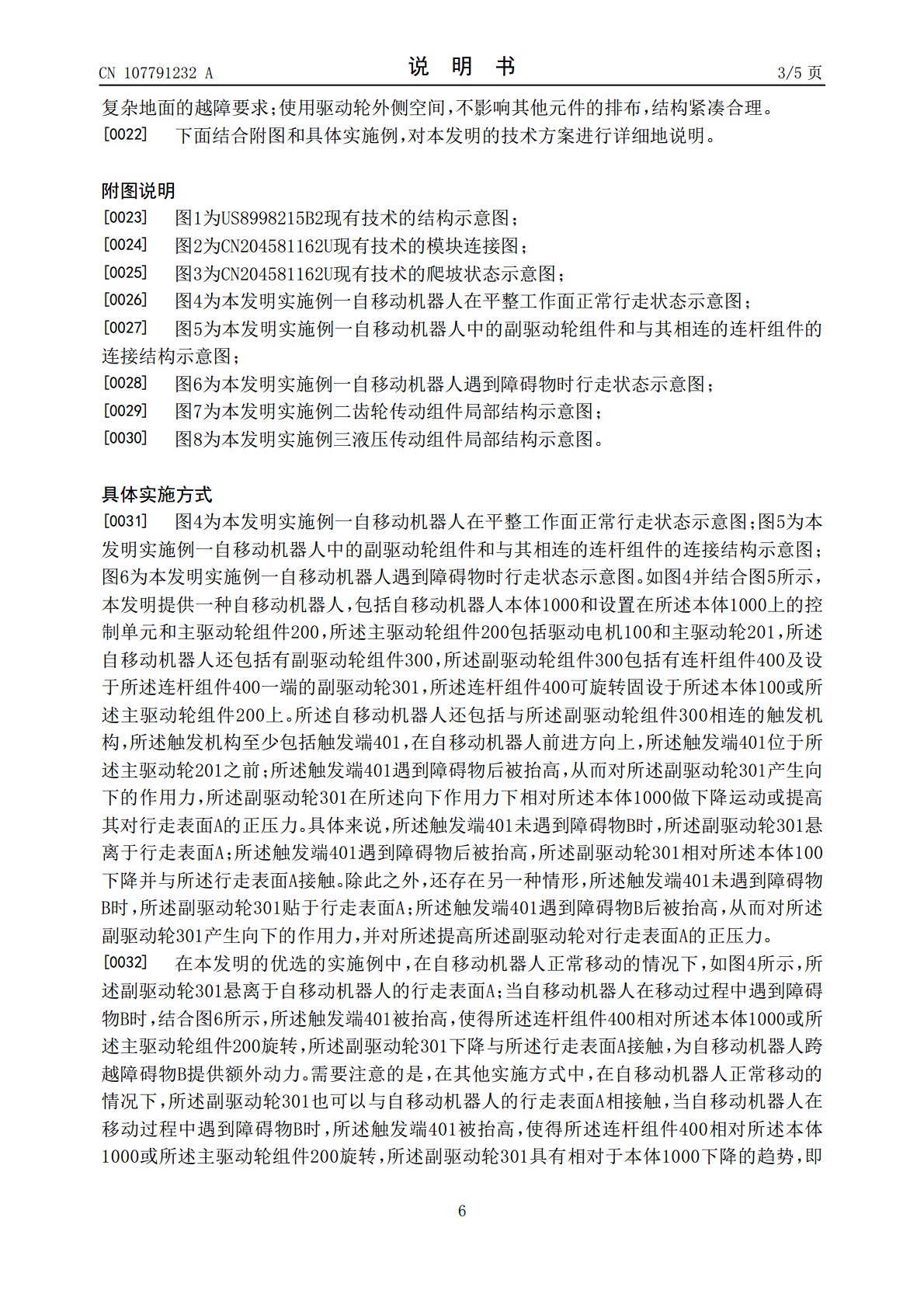
本申请实施例提供一种自移动机器人及其行走方法,所述自移动机器人包括机体、驱动轮组件及越障组件;所述驱动轮组件通过第一旋转轴可旋转的设置在所述机体上;所述驱动轮组件包括驱动轮;所述驱动轮相对所述机体从第一位置移动至第二位置过程中,所述越障组件施力于所述驱动轮组件,所述驱动轮与行进面之间的正压力变化幅度小于或等于设定阈值。本申请提供的技术方案中,在自移动机器人遇到障碍机体被顶起或行走至凹坑处时,驱动轮组件除受自身重力外,还受到越障组件施加的作用力;在这些力的共同作用下,驱动轮与行进面之间的正压力变化幅度小于或