
一种智能搬运机器人.pdf

Ro****44


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能搬运机器人.pdf
本发明公开一种智能搬运机器人,包括底座、后罩壳、机械臂、摆臂运动机构、翻转运动机构、垂直运动机构、水平移动机构、旋转运动机构,旋转运动机构上连接有由其带动旋转的旋转支架,旋转支架上安装有射频阅读器及机械手爪,射频阅读器与PLC控制器电连接,机械手爪包括手爪座、移动板及驱动移动板的驱动装置,移动板的两侧设置有齿,驱动装置由PLC控制器控制,并安装在旋转支架上,手爪座通过连接杆与旋转支架连接,且手爪座上位于移动板的两侧均设置有转轴,转轴上连接有手爪及与移动板上的齿相啮合的齿轮。本发明通过增设射频阅读器,可有效
一种搬运智能机器人.pdf
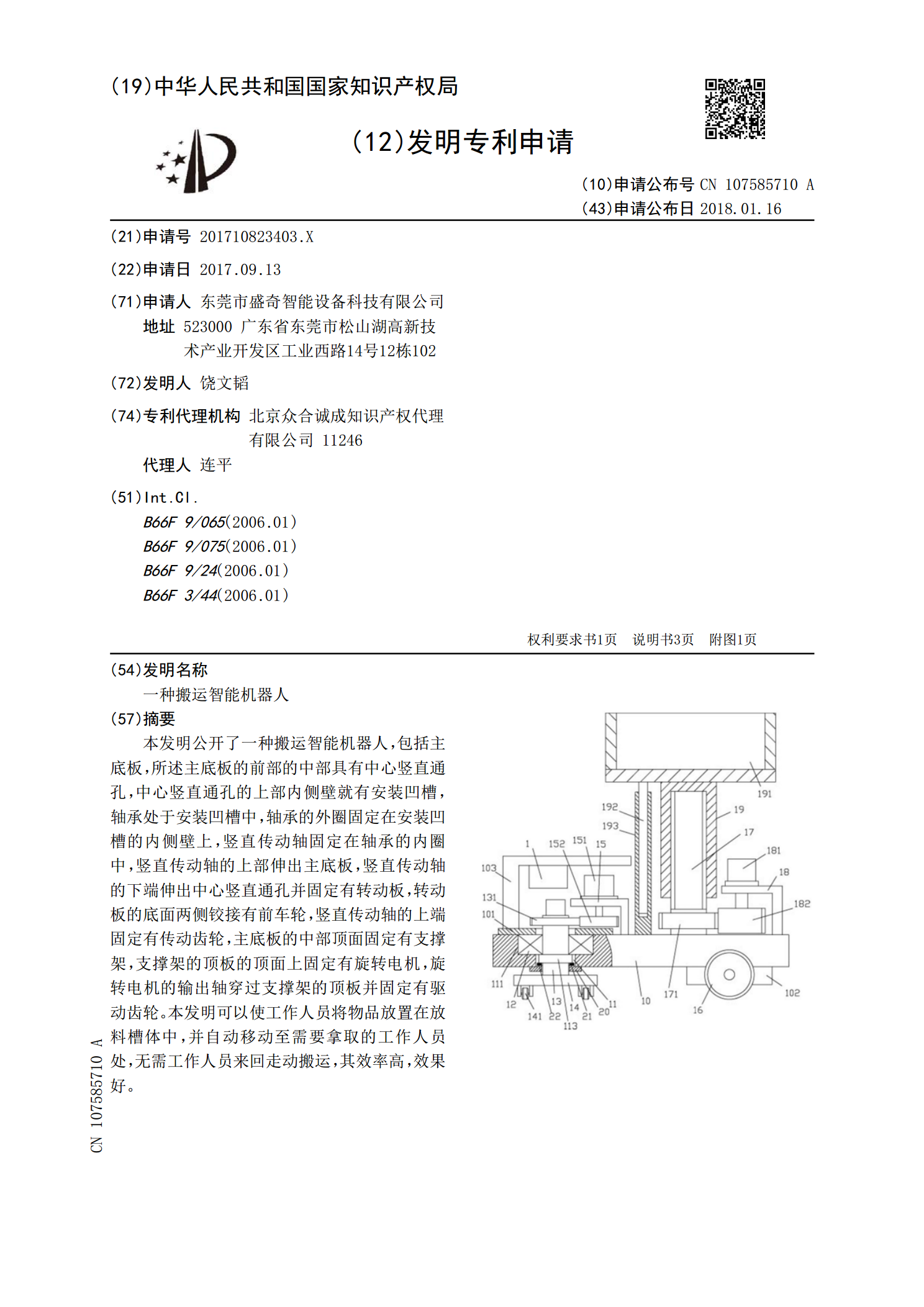
本发明公开了一种搬运智能机器人,包括主底板,所述主底板的前部的中部具有中心竖直通孔,中心竖直通孔的上部内侧壁就有安装凹槽,轴承处于安装凹槽中,轴承的外圈固定在安装凹槽的内侧壁上,竖直传动轴固定在轴承的内圈中,竖直传动轴的上部伸出主底板,竖直传动轴的下端伸出中心竖直通孔并固定有转动板,转动板的底面两侧铰接有前车轮,竖直传动轴的上端固定有传动齿轮,主底板的中部顶面固定有支撑架,支撑架的顶板的顶面上固定有旋转电机,旋转电机的输出轴穿过支撑架的顶板并固定有驱动齿轮。本发明可以使工作人员将物品放置在放料槽体中,并自
一种智能搬运机器人.pdf
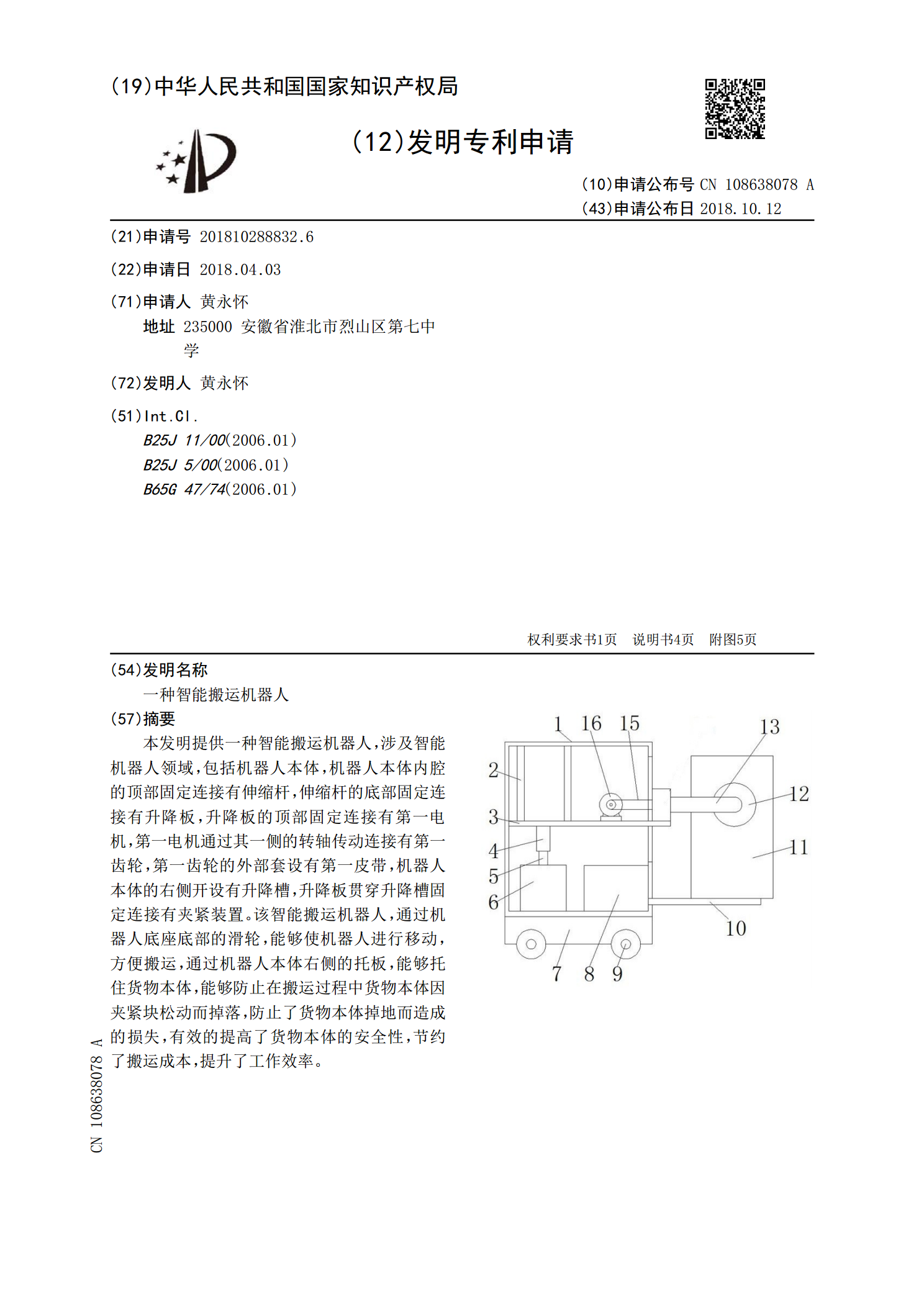
本发明提供一种智能搬运机器人,涉及智能机器人领域,包括机器人本体,机器人本体内腔的顶部固定连接有伸缩杆,伸缩杆的底部固定连接有升降板,升降板的顶部固定连接有第一电机,第一电机通过其一侧的转轴传动连接有第一齿轮,第一齿轮的外部套设有第一皮带,机器人本体的右侧开设有升降槽,升降板贯穿升降槽固定连接有夹紧装置。该智能搬运机器人,通过机器人底座底部的滑轮,能够使机器人进行移动,方便搬运,通过机器人本体右侧的托板,能够托住货物本体,能够防止在搬运过程中货物本体因夹紧块松动而掉落,防止了货物本体掉地而造成的损失,有效

一种智能搬运机器人.pdf
本发明公开了一种智能搬运机器人,包括搬运机器人本体,所述搬运机器人本体的下端设置有移动轮,且搬运机器人本体下端靠近移动轮的内侧位置处设置有智能控制箱,所述搬运机器人本体的上端设置有撑物平台,所述智能控制箱的前表面嵌入设置有控制面板,本发明设置了第一夹板和第二夹板,能够将撑物平台上的物体夹装固定,使搬运机器人移动更加平稳,设置了摄像头,能够监控搬运机器人工作时的状态,便于工作人员控制操作,设置了吸尘器,能够除去撑物平台上的尘屑,避免撑物平台上尘屑过多,影响搬运机器人和被搬运物体美观的问题,设置第二伸缩杆,实

一种智能搬运机器人.pdf
本发明公开了一种智能搬运机器人,涉及搬运机器人技术领域,包括机体、设于机体上的顶板以及设于机体底部的导轮,顶板上连接有安置台,安置台通过转轴转动连接在顶板上,安置台的形状与顶板的形状相同,机体内设有用于带动转轴定角度旋转的驱动机构,驱动机构包括同轴心固定在转轴上的从动盘以及设于机体内的主动件,主动件与从动盘适配,机体内开设有容纳槽,顶板滑移连接在容纳槽中,容纳槽中还设有用于驱动顶板在垂直方向上滑移的升降件,它能够在搬运工件的过程中较为精确地对准下一道工序的设备所处的方位,且花费时间较少,精准度高,提高自动