
一种舵机、旋转角度零点设置方法和装置.pdf

猫巷****傲柏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种舵机、旋转角度零点设置方法和装置.pdf
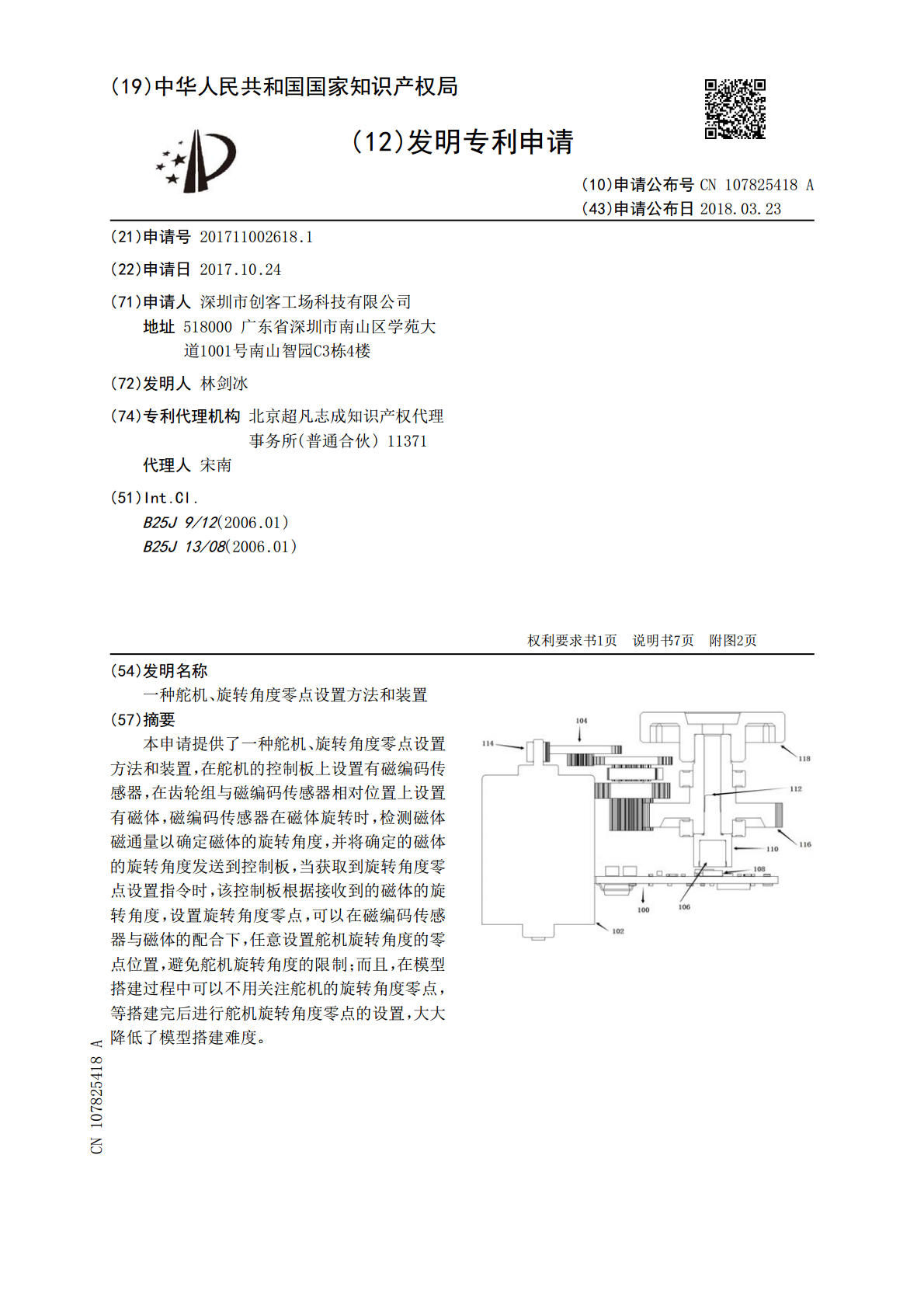
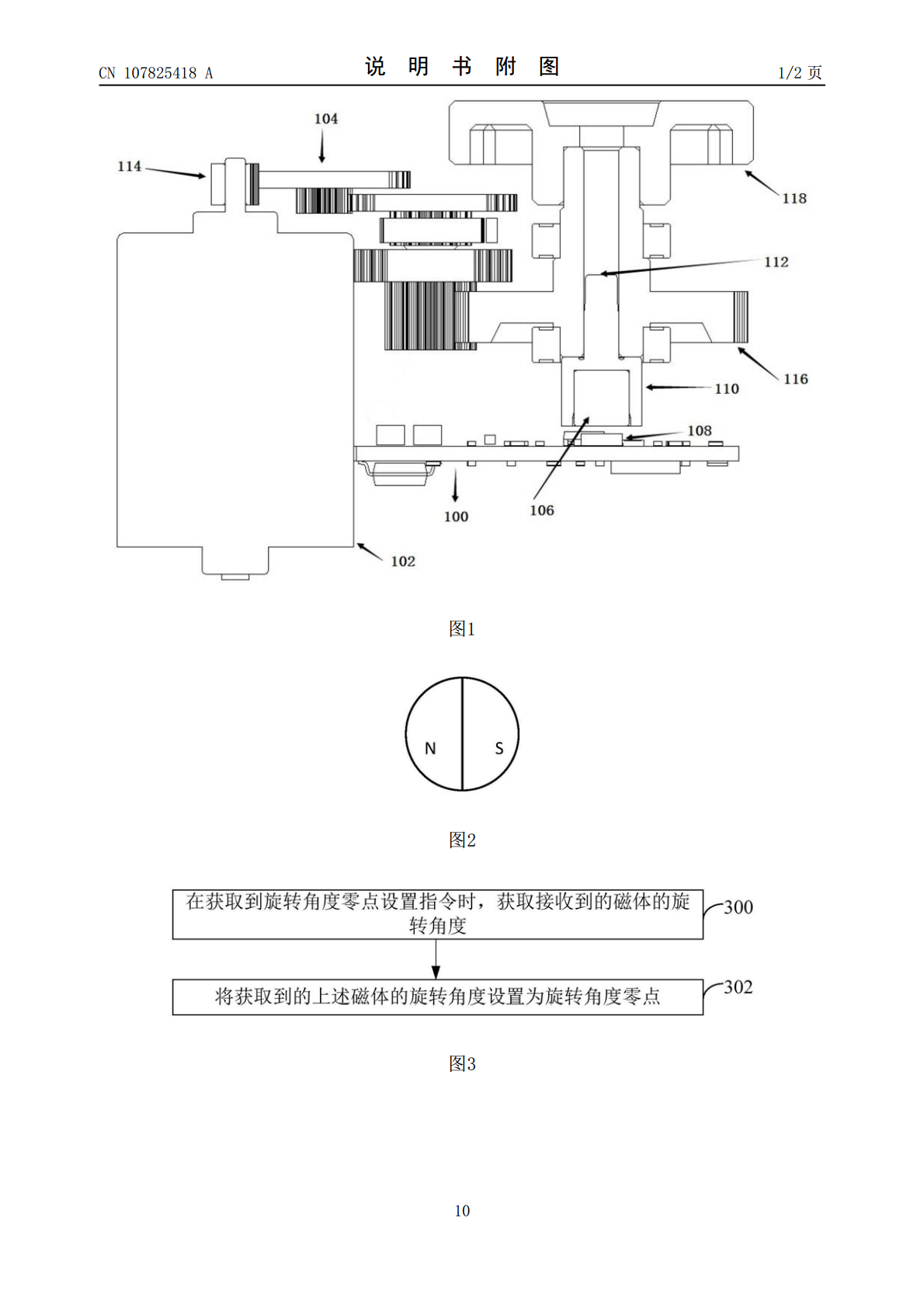
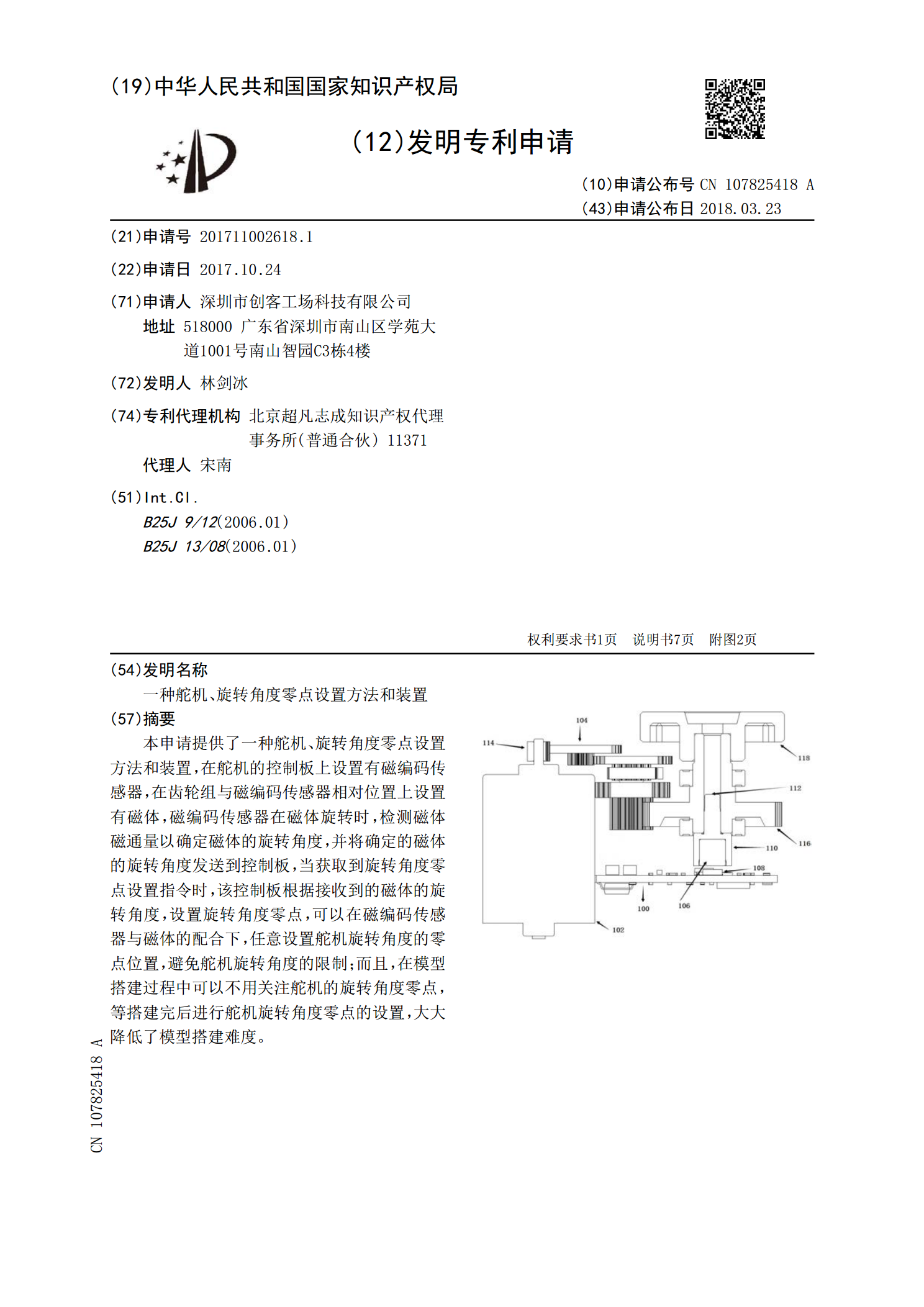
本申请提供了一种舵机、旋转角度零点设置方法和装置,在舵机的控制板上设置有磁编码传感器,在齿轮组与磁编码传感器相对位置上设置有磁体,磁编码传感器在磁体旋转时,检测磁体磁通量以确定磁体的旋转角度,并将确定的磁体的旋转角度发送到控制板,当获取到旋转角度零点设置指令时,该控制板根据接收到的磁体的旋转角度,设置旋转角度零点,可以在磁编码传感器与磁体的配合下,任意设置舵机旋转角度的零点位置,避免舵机旋转角度的限制;而且,在模型搭建过程中可以不用关注舵机的旋转角度零点,等搭建完后进行舵机旋转角度零点的设置,大大降低了模

一种舵机运行状态设置方法及装置.pdf
本发明实施例提供一种舵机运行状态设置方法,包括如下内容:获取状态设置数据;对状态设置数据进行识别;根据识别结果运行相应的状态。本发明实施例还提供一种舵机运行状态设置装置。本发明可以在不改变原有舵机控制方式和性能的基础上,根据需要自主选择设置舵机功能或运行状态,以实现用户对相应功能的需求,突破了原有舵机选择的局限性,使得用户使用方便,进而有效提高了用户体验。

一种角度旋转装置.pdf
本发明公开了一种角度旋转装置,包括主机、显示屏、桌面,包括底座、支撑座、旋转轴、固定架、第一齿轮、电机座、伺服电机、控制终端、第二齿轮、调节开关,底座位于桌面顶部,支撑座位于底座顶部,二者螺纹相连,旋转轴位于支撑座上端,二者转动相连,固定架位于旋转轴侧壁,二者焊接相连,第一齿轮位于旋转轴右端侧壁中心处,二者紧配相连,电机座位于底座顶部右端,二者螺纹相连,伺服电机位于电机座顶部中心处,二者螺纹相连,控制终端位于主机内部,二者螺纹相连,第二齿轮位于伺服电机正面中心处,二者紧配相连,调节开关位于桌面顶部。该装置
一种舵机的功能检测装置和方法.pdf
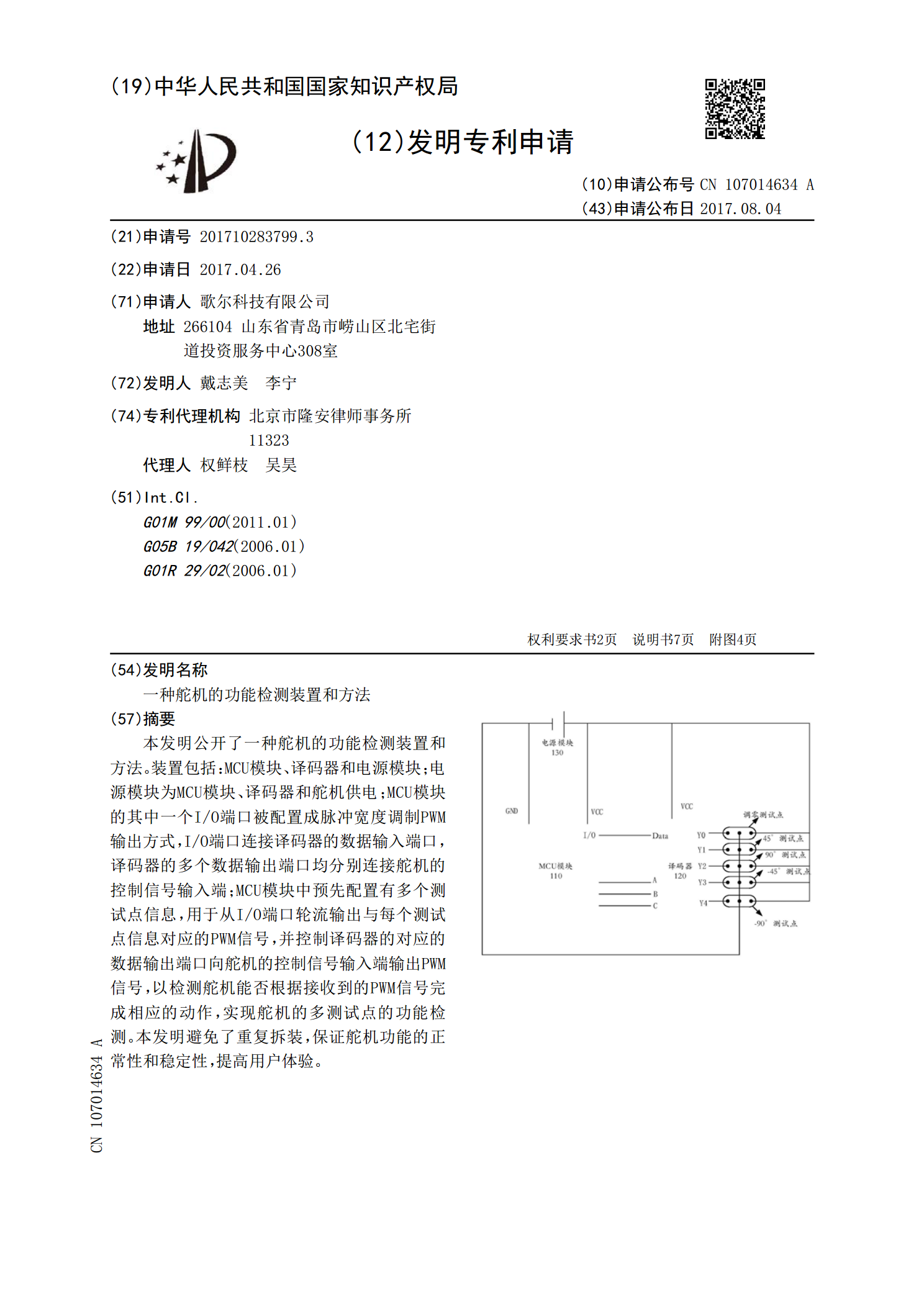
本发明公开了一种舵机的功能检测装置和方法。装置包括:MCU模块、译码器和电源模块;电源模块为MCU模块、译码器和舵机供电;MCU模块的其中一个I/O端口被配置成脉冲宽度调制PWM输出方式,I/O端口连接译码器的数据输入端口,译码器的多个数据输出端口均分别连接舵机的控制信号输入端;MCU模块中预先配置有多个测试点信息,用于从I/O端口轮流输出与每个测试点信息对应的PWM信号,并控制译码器的对应的数据输出端口向舵机的控制信号输入端输出PWM信号,以检测舵机能否根据接收到的PWM信号完成相应的动作,实现舵机的多
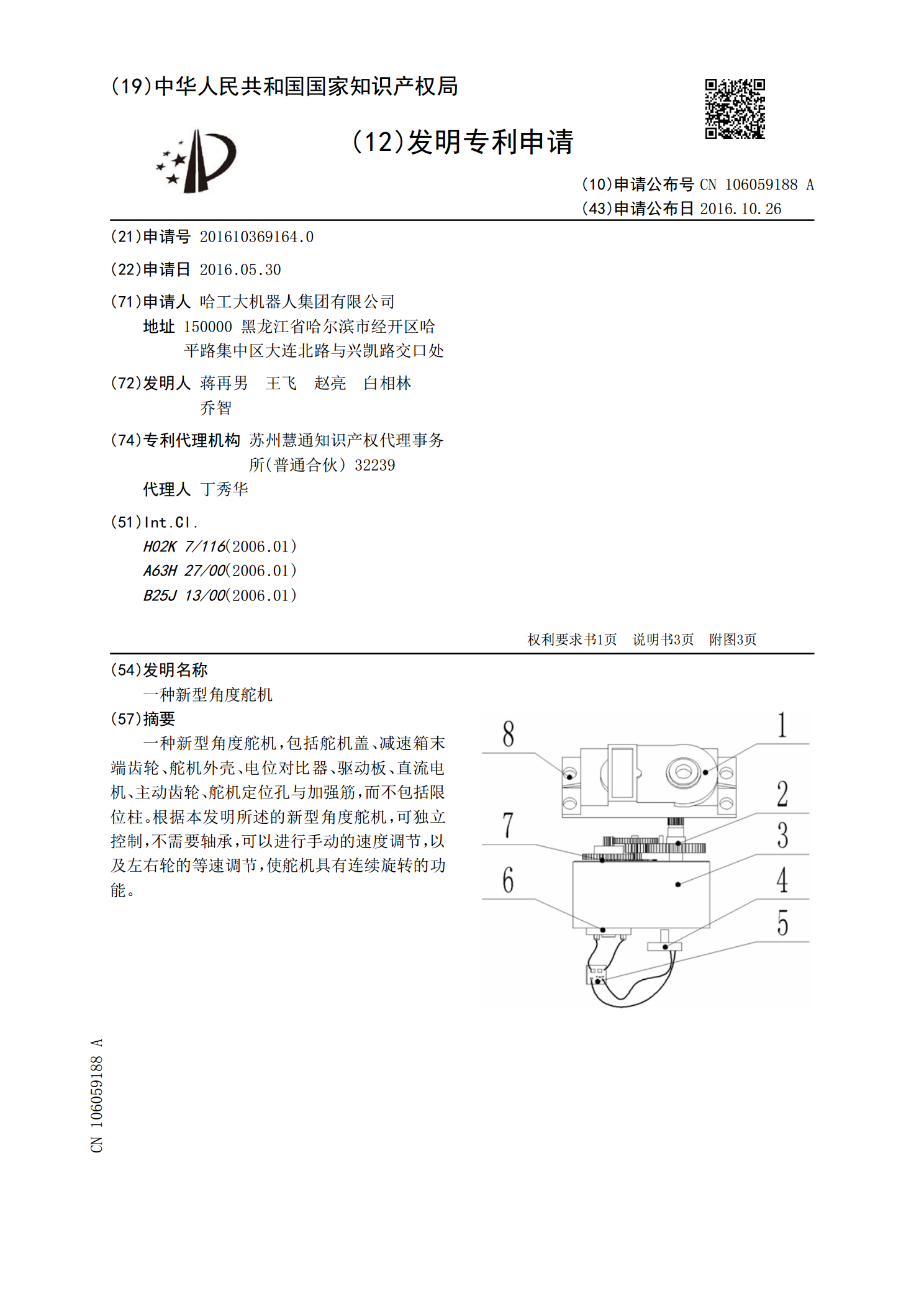
一种新型角度舵机.pdf
一种新型角度舵机,包括舵机盖、减速箱末端齿轮、舵机外壳、电位对比器、驱动板、直流电机、主动齿轮、舵机定位孔与加强筋,而不包括限位柱。根据本发明所述的新型角度舵机,可独立控制,不需要轴承,可以进行手动的速度调节,以及左右轮的等速调节,使舵机具有连续旋转的功能。