
车轮独立驱动式车辆的驱动控制装置.pdf

高格****gu


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车轮独立驱动式车辆的驱动控制装置.pdf
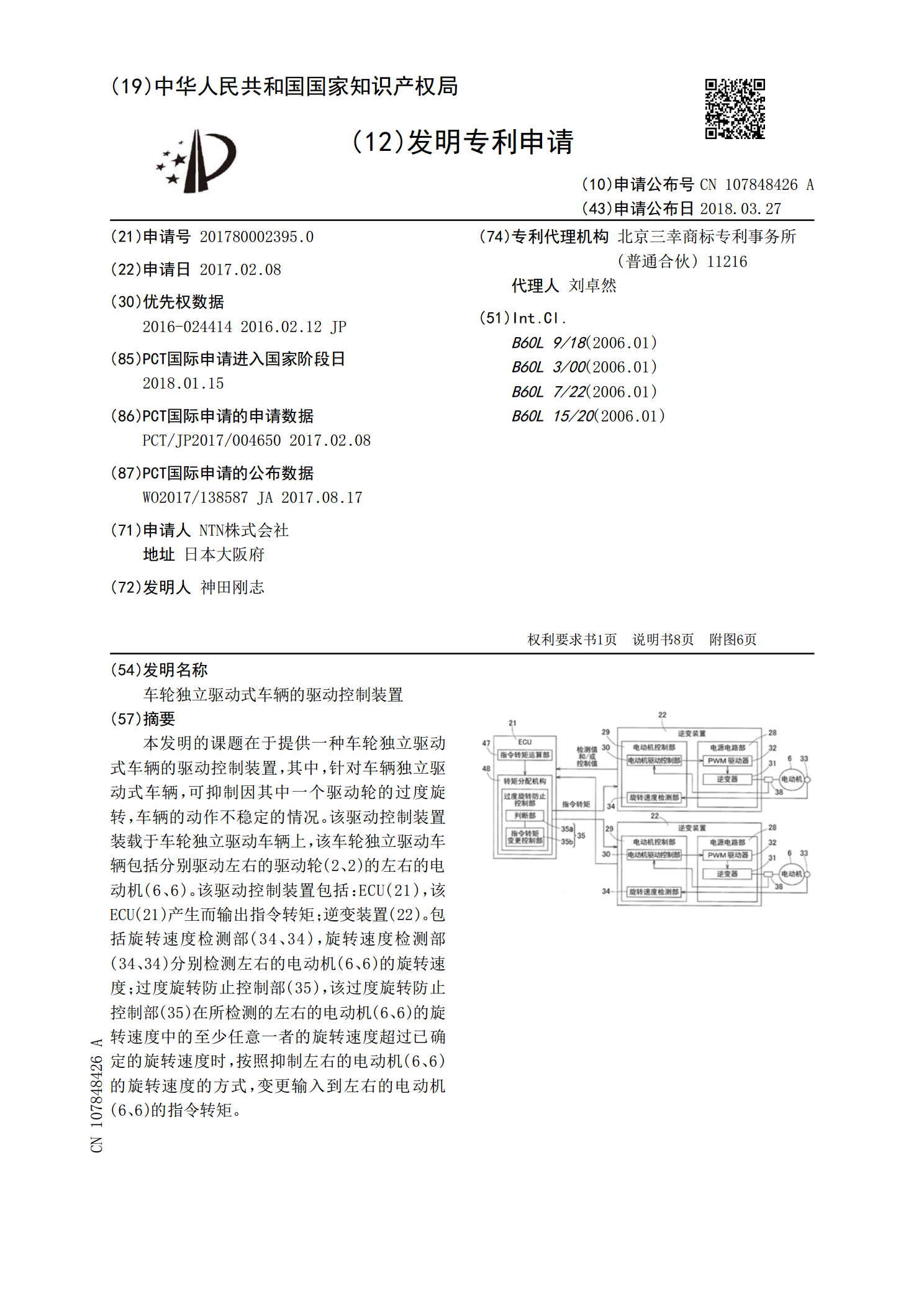
本发明的课题在于提供一种车轮独立驱动式车辆的驱动控制装置,其中,针对车辆独立驱动式车辆,可抑制因其中一个驱动轮的过度旋转,车辆的动作不稳定的情况。该驱动控制装置装载于车轮独立驱动车辆上,该车轮独立驱动车辆包括分别驱动左右的驱动轮(2、2)的左右的电动机(6、6)。该驱动控制装置包括:ECU(21),该ECU(21)产生而输出指令转矩;逆变装置(22)。包括旋转速度检测部(34、34),旋转速度检测部(34、34)分别检测左右的电动机(6、6)的旋转速度;过度旋转防止控制部(35),该过度旋转防止控制部(3

车辆的车轮驱动装置.pdf
本发明涉及一种用于驱动车辆车轮的车轮驱动装置,包括:用于产生驱动力矩的驱动电机;用于提高驱动力矩的传动机构;以及带有至少一个活节的、用于将提高的驱动力矩传递到车轮上的万向轴,在该车轮驱动装置中,驱动电机构造为包围着万向轴。

分布式独立电驱动的轻型履带车辆车轮传动装置.pdf
本发明属于履带车辆驱动装置技术领域,具体涉及一种特别适用于分布式独立电驱动的轻型高速履带车辆的的车轮传动装置,包括驱动电机、减速装置、半轴、传动套、制动盘连接毂套、制动卡钳组件、车身、传动套支撑座、密封件、锁紧螺母、外轴承、内轴承、轮毂组件,本发明相对于传统的履带车传动装置的设计,采用结构与受力分离的设计思想,传动套负责承担路面冲击引起的弯矩与其他作用力,驱动转矩由半轴承担,同时对于制动盘连接毂套的结构设计,提出了新颖的一体式多功能结构设计方法,使整个车轮传动装置结构简洁,可靠性高。

车轮驱动装置和具备该车轮驱动装置的电动车辆.pdf
本发明涉及车轮驱动装置和具备该车轮驱动装置的电动车辆。不受电动机的个体差异、使用环境的影响,能够从低速区域至高速区域高效地驱动电动机并能获得良好的车辆特性。两轮电动车(1)包括车轮驱动装置(10)。车轮驱动装置(10)包括驱动车轮(2)的车轮驱动用电动机(100)、改变车轮驱动用电动机(100)的间隙长度gap的间隙变更装置(200)、和控制车轮驱动用电动机(100)和间隙变更装置(200)的电动机控制单元(300)。电动机控制单元(300)根据加速器开度信号、转速n、q轴电流指令值Iq*、电源

用于能电驱动的车辆的用来驱动车轮的驱动装置.pdf
本发明提出了一种用于能电驱动的车辆的用来驱动车轮(7)的驱动装置(11),其包括电机(12)和变速器单元,其中,变速器单元具有圆柱齿轮变速器(14)和行星齿轮变速器(13),它们在牵引运行中的动力流方向上观察以行星齿轮变速器(13)-圆柱齿轮变速器(14)的顺序布置在电机(12)的输出侧。