
一种基于弹性元件刚度切换机制的踝关节外骨骼.pdf

含秀****66

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于弹性元件刚度切换机制的踝关节外骨骼.pdf
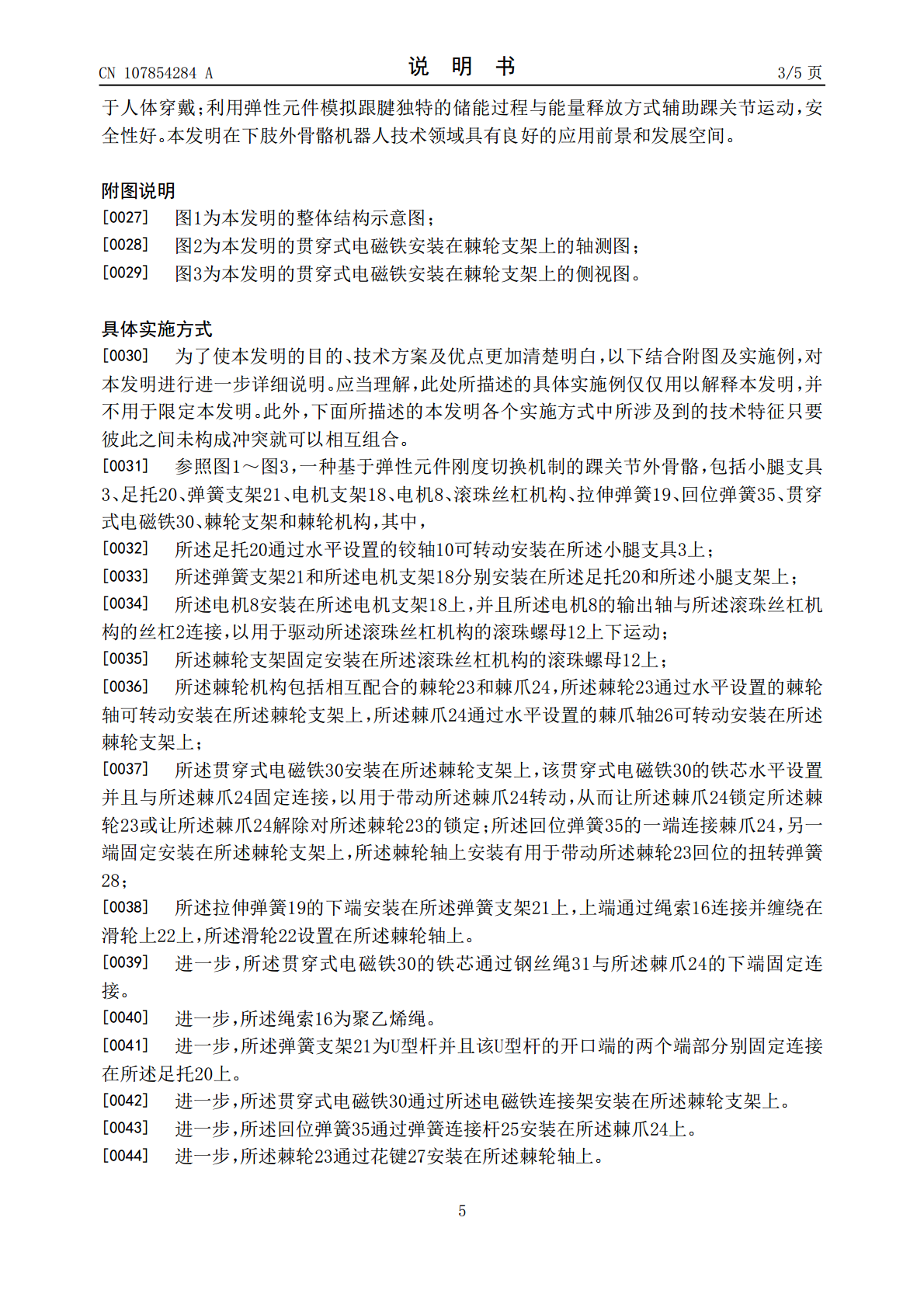
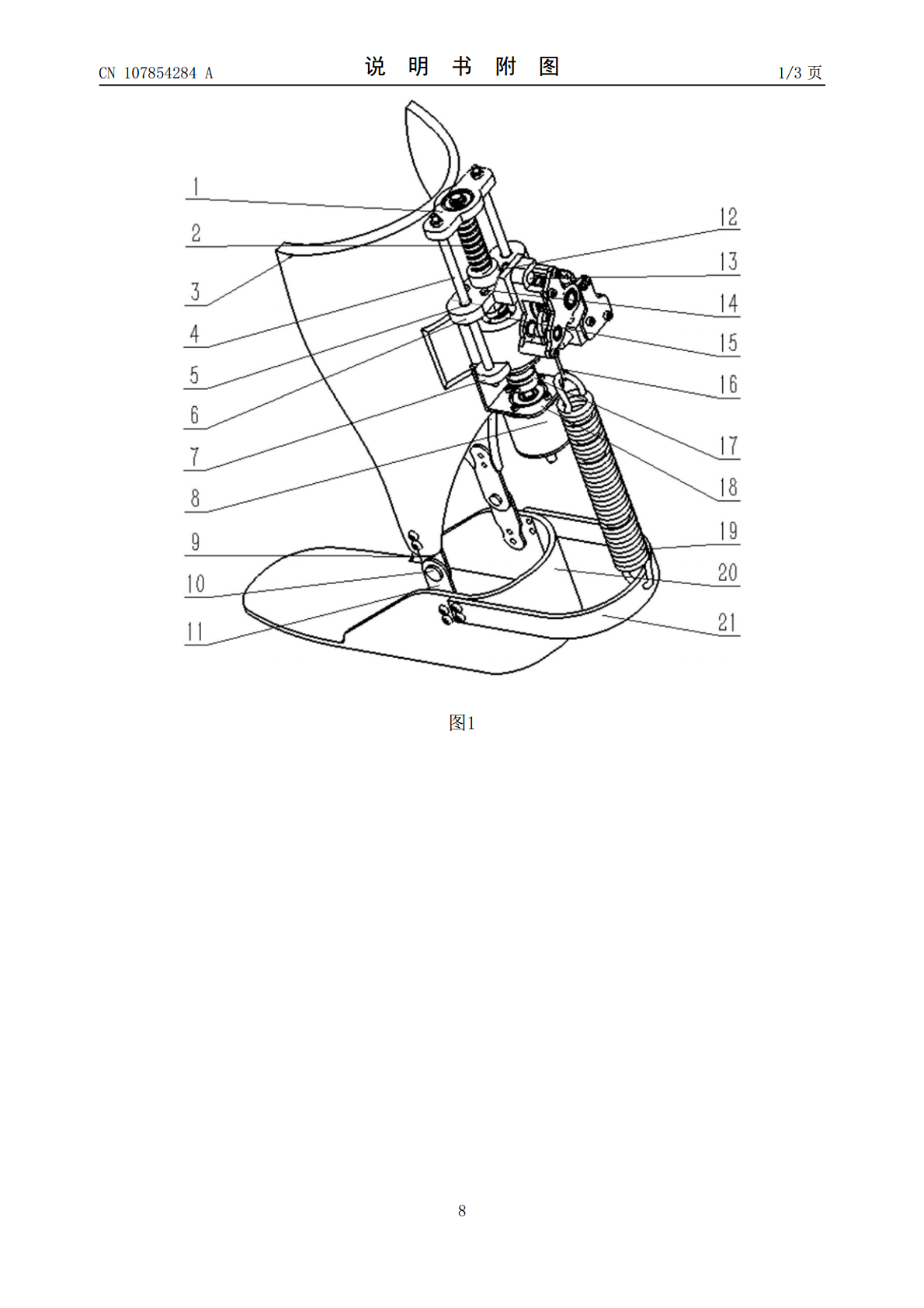
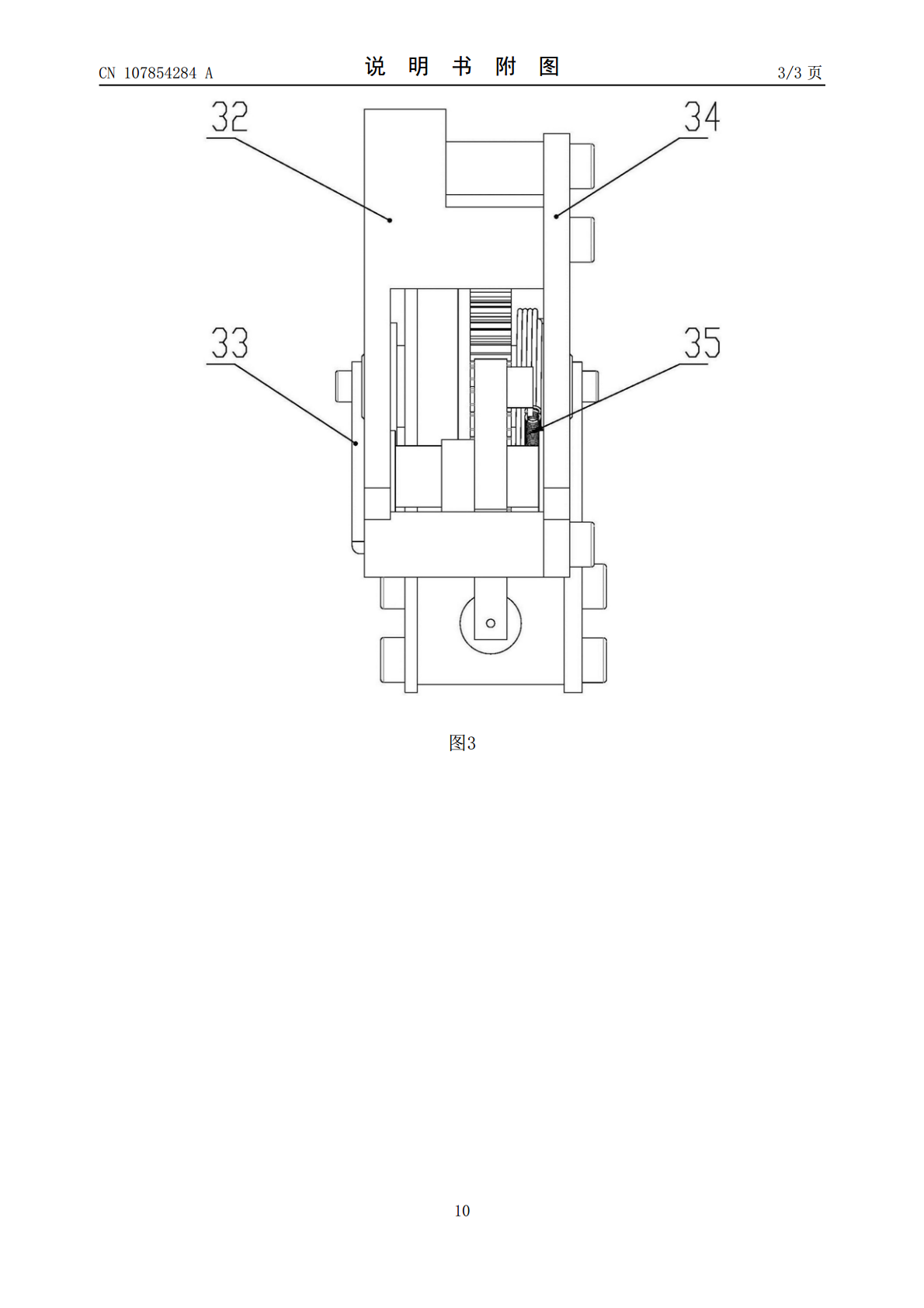
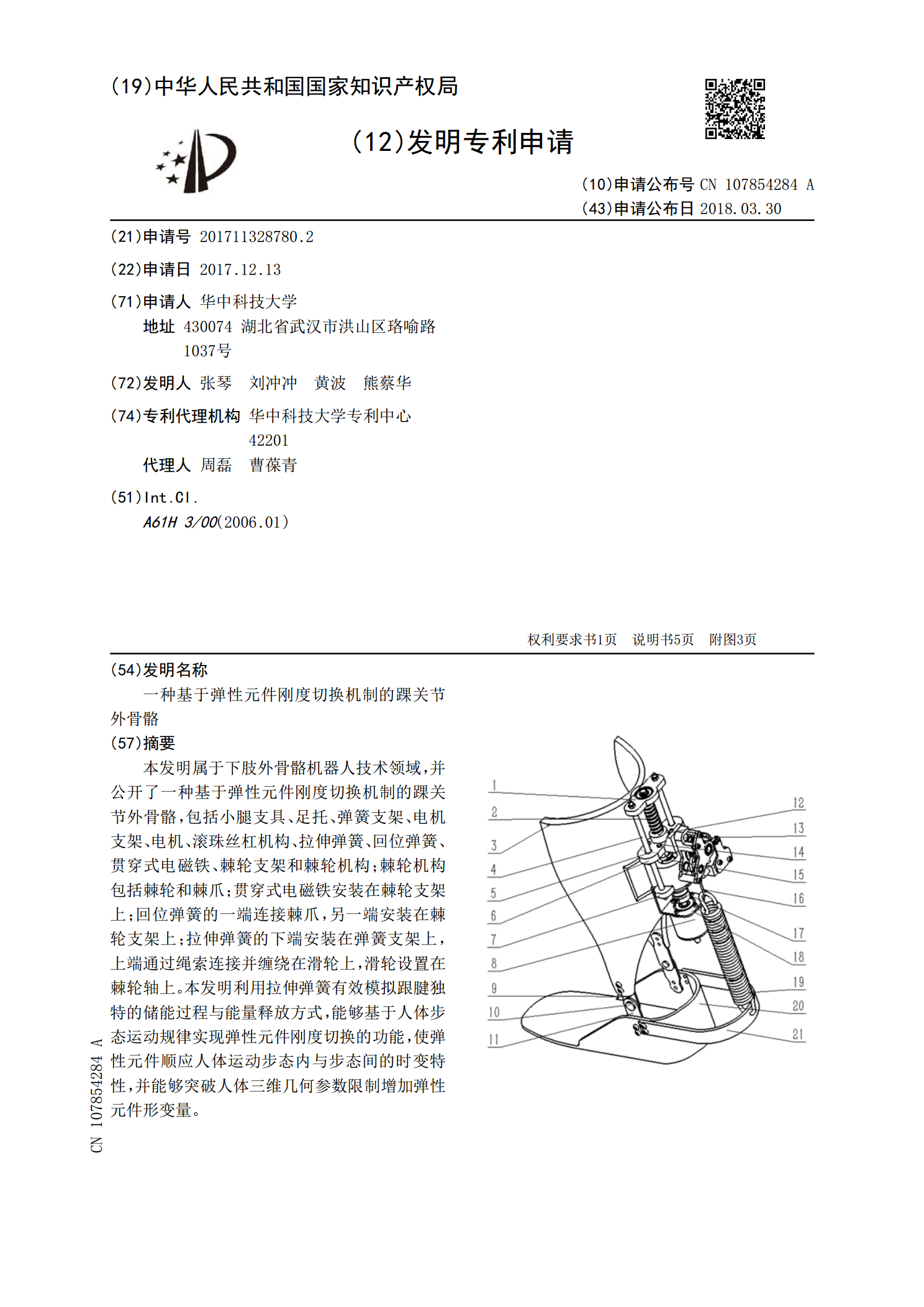
本发明属于下肢外骨骼机器人技术领域,并公开了一种基于弹性元件刚度切换机制的踝关节外骨骼,包括小腿支具、足托、弹簧支架、电机支架、电机、滚珠丝杠机构、拉伸弹簧、回位弹簧、贯穿式电磁铁、棘轮支架和棘轮机构;棘轮机构包括棘轮和棘爪;贯穿式电磁铁安装在棘轮支架上;回位弹簧的一端连接棘爪,另一端安装在棘轮支架上;拉伸弹簧的下端安装在弹簧支架上,上端通过绳索连接并缠绕在滑轮上,滑轮设置在棘轮轴上。本发明利用拉伸弹簧有效模拟跟腱独特的储能过程与能量释放方式,能够基于人体步态运动规律实现弹性元件刚度切换的功能,使弹性元件
一种踝关节外骨骼.pdf
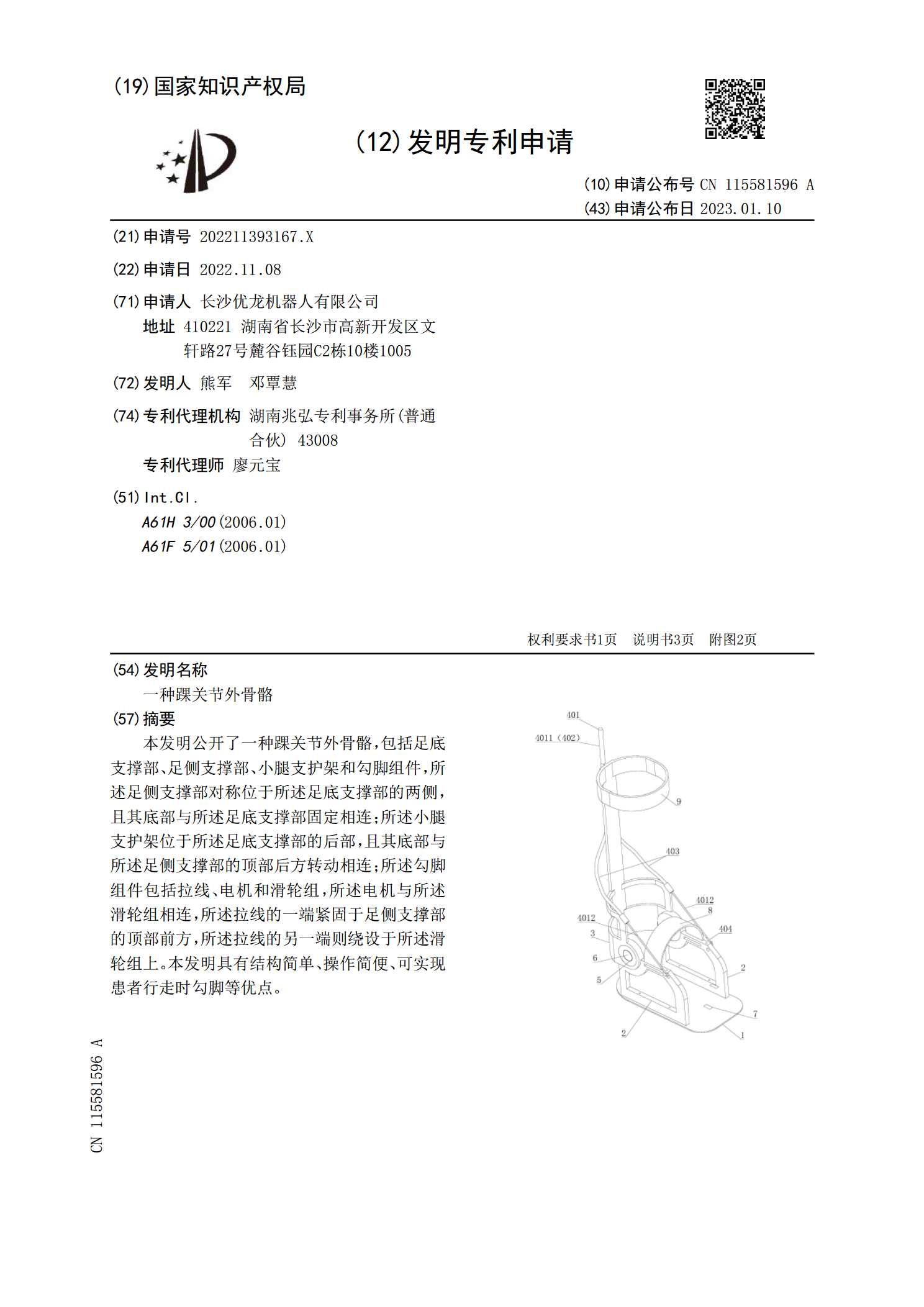
本发明公开了一种踝关节外骨骼,包括足底支撑部、足侧支撑部、小腿支护架和勾脚组件,所述足侧支撑部对称位于所述足底支撑部的两侧,且其底部与所述足底支撑部固定相连;所述小腿支护架位于所述足底支撑部的后部,且其底部与所述足侧支撑部的顶部后方转动相连;所述勾脚组件包括拉线、电机和滑轮组,所述电机与所述滑轮组相连,所述拉线的一端紧固于足侧支撑部的顶部前方,所述拉线的另一端则绕设于所述滑轮组上。本发明具有结构简单、操作简便、可实现患者行走时勾脚等优点。
一种基于弹性元件的可变刚度被动柔顺关节.pdf
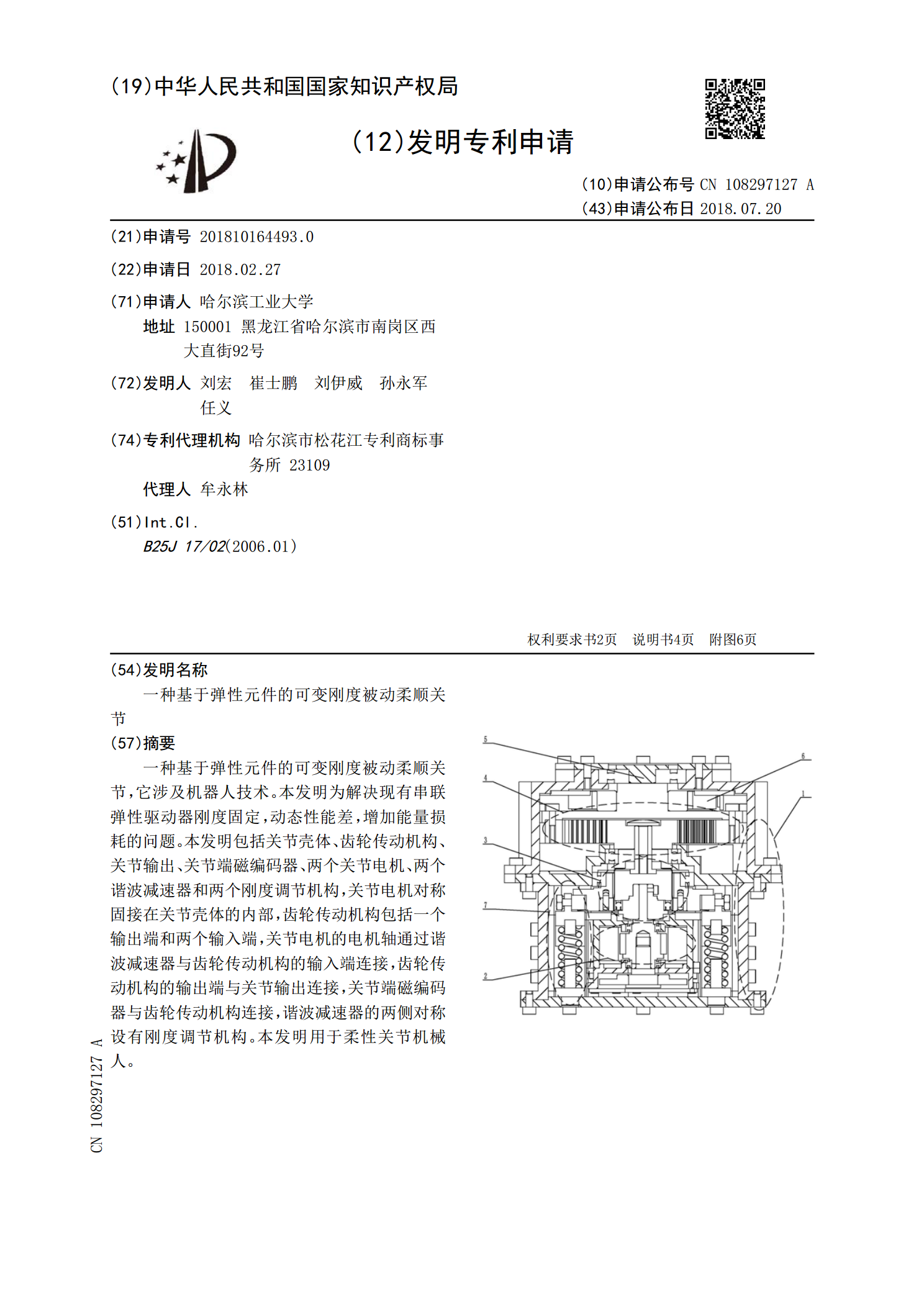
一种基于弹性元件的可变刚度被动柔顺关节,它涉及机器人技术。本发明为解决现有串联弹性驱动器刚度固定,动态性能差,增加能量损耗的问题。本发明包括关节壳体、齿轮传动机构、关节输出、关节端磁编码器、两个关节电机、两个谐波减速器和两个刚度调节机构,关节电机对称固接在关节壳体的内部,齿轮传动机构包括一个输出端和两个输入端,关节电机的电机轴通过谐波减速器与齿轮传动机构的输入端连接,齿轮传动机构的输出端与关节输出连接,关节端磁编码器与齿轮传动机构连接,谐波减速器的两侧对称设有刚度调节机构。本发明用于柔性关节机械人。

一种基于变刚度弹簧的柔性下肢外骨骼.pdf
本发明属于下肢外骨骼机器人领域,公开了一种基于变刚度弹簧的柔性下肢外骨骼,其通过设置n‑1个尼龙细绳和n个弹簧元件,第i尼龙细绳两端分别相对于第i弹簧元件的两端固定,且第i尼龙细绳预留一指定的松弛预留量,以限制第i弹簧元件的最大拉伸长度,i=1、2、…n‑1,实现运动过程中的刚度变化,运动到不同阶段时不同的尼龙细绳绷直,从而使相应的弹簧元件不能继续拉伸,改变弹簧元件的总刚度,有效地储存能量,但是尼龙细绳不限制弹簧元件的回复,从而使得弹簧元件能在回复时提供助力,最终达到减小人体在行走、蹲起过程中代谢消耗的目
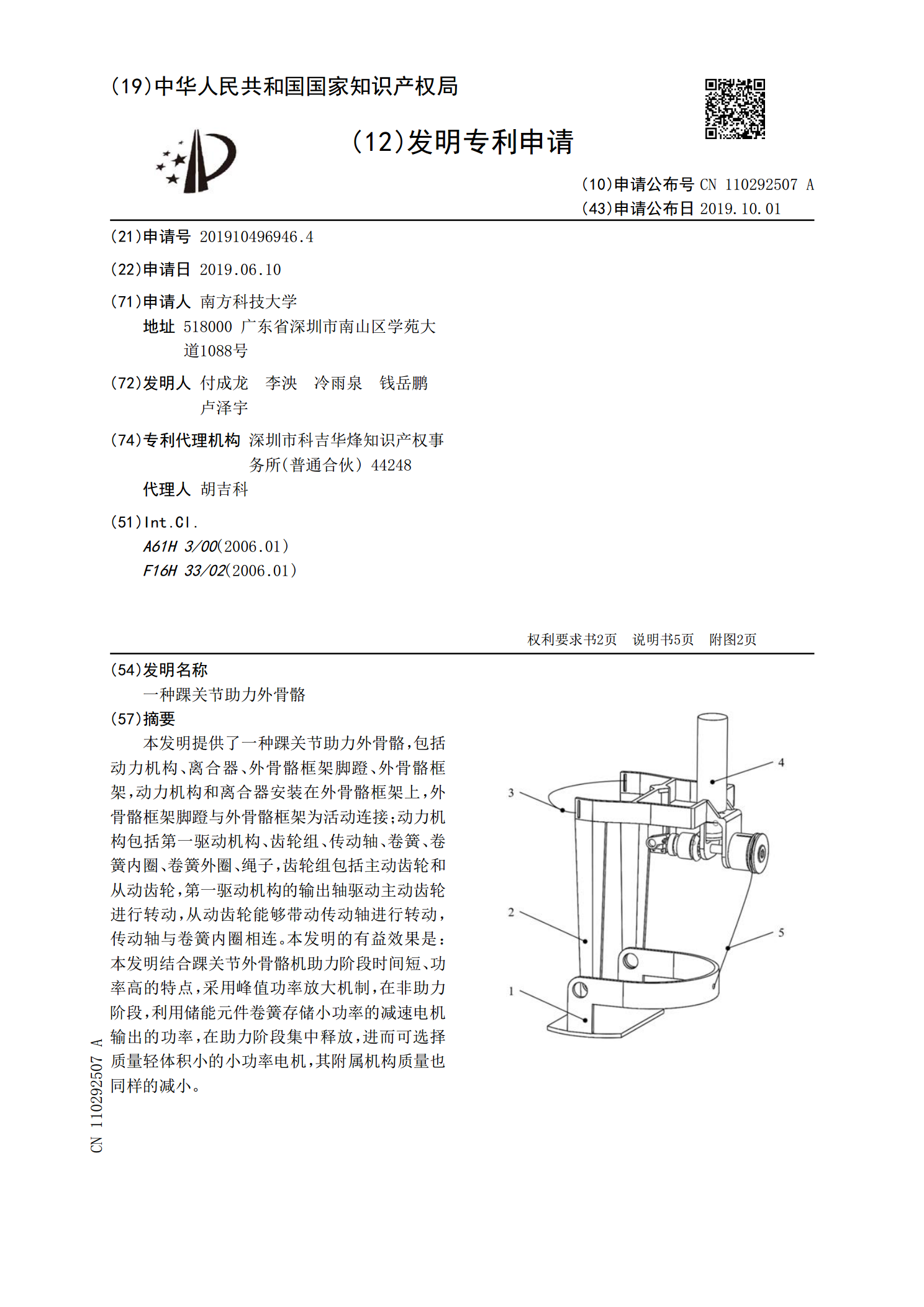
一种踝关节助力外骨骼.pdf
本发明提供了一种踝关节助力外骨骼,包括动力机构、离合器、外骨骼框架脚蹬、外骨骼框架,动力机构和离合器安装在外骨骼框架上,外骨骼框架脚蹬与外骨骼框架为活动连接;动力机构包括第一驱动机构、齿轮组、传动轴、卷簧、卷簧内圈、卷簧外圈、绳子,齿轮组包括主动齿轮和从动齿轮,第一驱动机构的输出轴驱动主动齿轮进行转动,从动齿轮能够带动传动轴进行转动,传动轴与卷簧内圈相连。本发明的有益效果是:本发明结合踝关节外骨骼机助力阶段时间短、功率高的特点,采用峰值功率放大机制,在非助力阶段,利用储能元件卷簧存储小功率的减速电机输出的