
一种平衡行走模块化作业机器人.pdf

一只****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种平衡行走模块化作业机器人.pdf
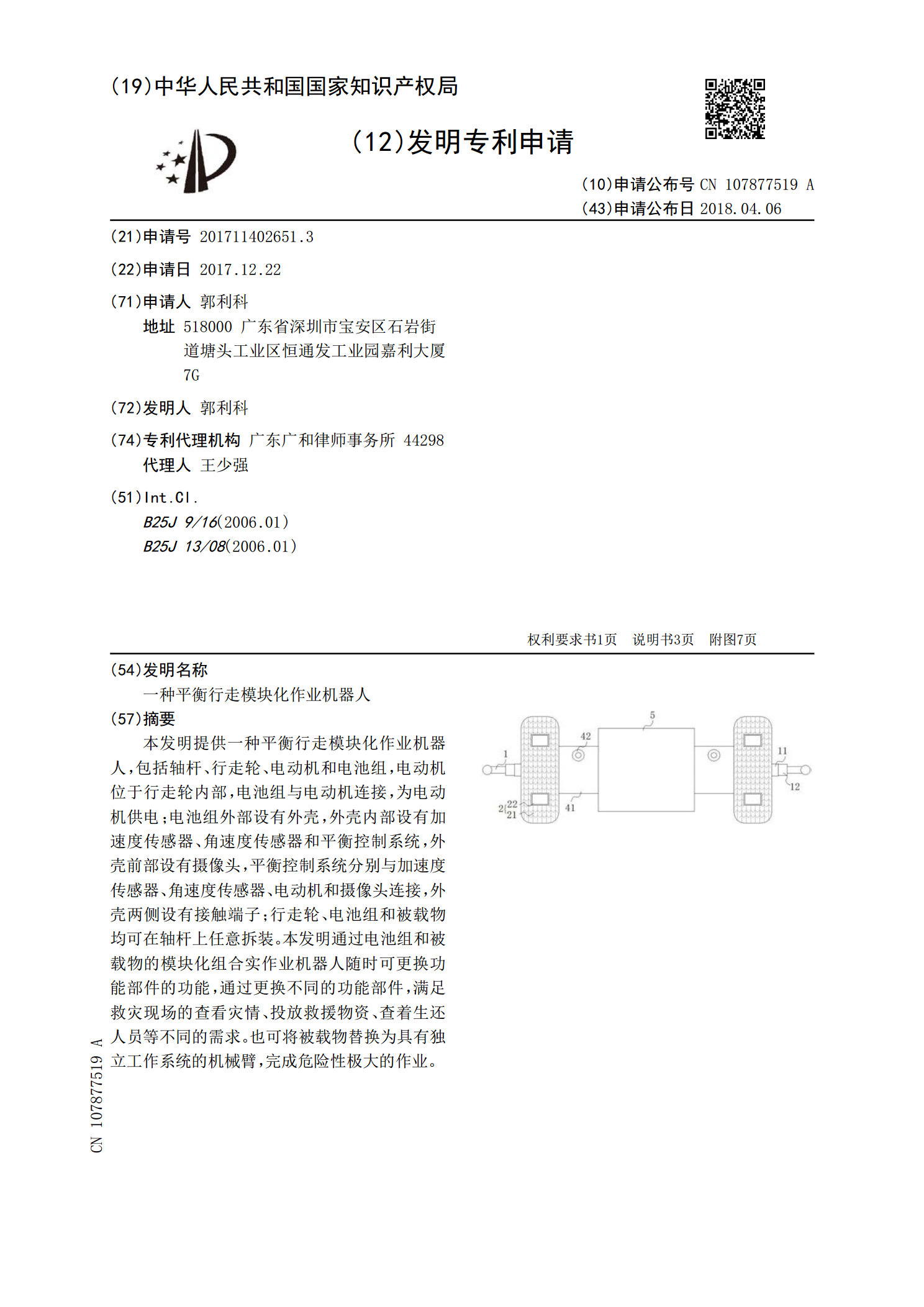
本发明提供一种平衡行走模块化作业机器人,包括轴杆、行走轮、电动机和电池组,电动机位于行走轮内部,电池组与电动机连接,为电动机供电;电池组外部设有外壳,外壳内部设有加速度传感器、角速度传感器和平衡控制系统,外壳前部设有摄像头,平衡控制系统分别与加速度传感器、角速度传感器、电动机和摄像头连接,外壳两侧设有接触端子;行走轮、电池组和被载物均可在轴杆上任意拆装。本发明通过电池组和被载物的模块化组合实作业机器人随时可更换功能部件的功能,通过更换不同的功能部件,满足救灾现场的查看灾情、投放救援物资、查着生还人员等不同

一种轮式行走机器人行走阻力平衡调节系统.pdf
本发明公开了一种轮式行走机器人行走阻力平衡调节系统,涉及机器人调节控制系统领域。本发明中:行走机器人本体上装设有陀螺仪,行走机器人的传动机构上装设有速度传感器,行走机器人的传动机构与相应的动力电机连接;行走阻力调节系统内设有陀螺仪监测单元、速率传感监测单元和电机驱动单元;行走阻力调节系统内设置有摩擦阻力平衡调节单元;行走阻力调节系统内设有数据信息存储单元和数据信息分析单元。本发明通过陀螺仪对机器人行走的路面坡度角度进行实时监测,通过速度传感器对行走机器人的行走速率进行实时监测,通过速率对比方式进行速率变化

一种机器人行走平衡装置.pdf
本发明公开了一种机器人行走平衡装置,包括底座,所述底座内设有驱动腔,所述驱动腔内安装有第一驱动装置,所述底座的下方设有与驱动腔连通的安装口,所述安装口内卡接有套管,所述套管的外侧连接有限位环,所述安装口内设有用于卡接限位环的限位槽,所述套管内设有连接板,所述第一驱动装置的驱动端连接有螺纹杆,所述连接板上设有用于螺纹连接螺纹杆的螺纹口,所述底座的下方设有滚轮,所述滚轮的两侧连接有卡接框。本发明整个底座保持平衡状态,从而使得整个机器人外壳的稳定性得到保证,并且限位框和限位杆也会使得机器人外壳的稳定性得到提升,

一种模块化自平衡教育机器人.pdf
本发明涉及教育机器人技术领域,尤其涉及一种模块化自平衡教育机器人,包括车体、两车轮以及驱动模块,所述车体上设有两个对称设置的脚踏板,所述车体内设有控制模块以及自平衡控制装置;所述车体的前端设有视觉传感器,所述视觉传感器与控制模块电路连接;所述脚踏板内设有力觉传感器,所述力觉传感器与控制模块电路连接;所述车体上设有语音交互模块,所述语音交互模块与所述控制模块电路连接;所述控制模块电路连接用于向所述控制模块输入编码信息的编码器模块,本发明的有益效果是:能通过视觉传感器实现自动跟随,并且通过语音交互模块实现与自

一种园林作业用行走机器人.pdf
本发明公开了一种园林作业用行走机器人,包括机架,所述机架上沿同一水平面的从前往后方向上依次设有第一转动轴、第二转动轴、第三转动轴、第四转动轴,所述第一转动轴、第二转动轴的一侧连接有第一行走机构,另一侧连接有第二行走机构,所述第三转动轴、第四转动轴的一侧连接有第三行走机构,另一侧连接有第四行走机构,所述第一行走机构包括垂直连接于第一转动轴一端的第一曲柄、垂直连接于第二转动轴一端的第二曲柄,所述第一曲柄、第二曲柄等长且平行,所述第一曲柄和第二曲柄的另一端通过第一连杆相连。本发明的机器人通过单电机的输出就可以实