
一种模块化自平衡教育机器人.pdf

骊英****bb


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种模块化自平衡教育机器人.pdf
本发明涉及教育机器人技术领域,尤其涉及一种模块化自平衡教育机器人,包括车体、两车轮以及驱动模块,所述车体上设有两个对称设置的脚踏板,所述车体内设有控制模块以及自平衡控制装置;所述车体的前端设有视觉传感器,所述视觉传感器与控制模块电路连接;所述脚踏板内设有力觉传感器,所述力觉传感器与控制模块电路连接;所述车体上设有语音交互模块,所述语音交互模块与所述控制模块电路连接;所述控制模块电路连接用于向所述控制模块输入编码信息的编码器模块,本发明的有益效果是:能通过视觉传感器实现自动跟随,并且通过语音交互模块实现与自
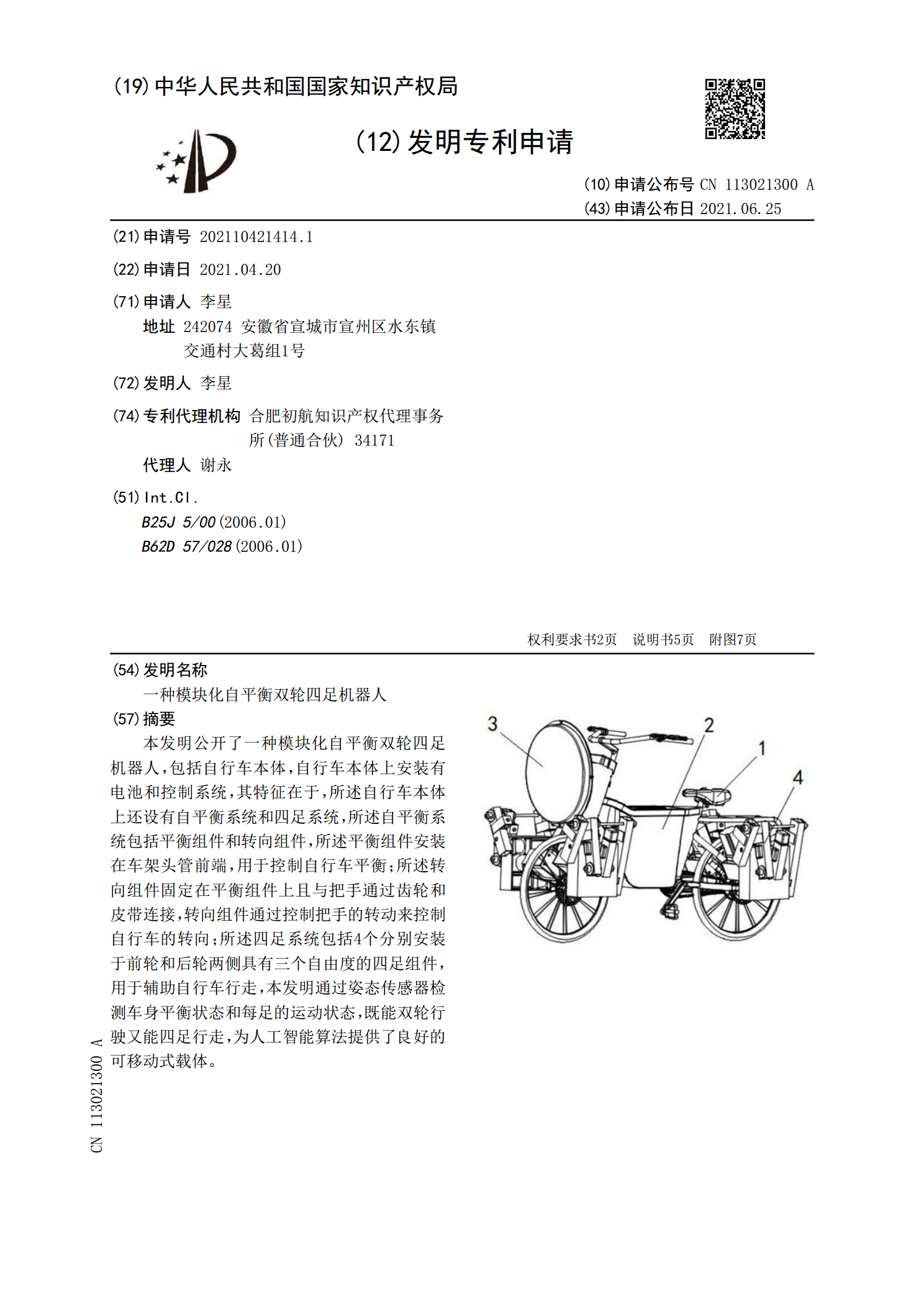
一种模块化自平衡双轮四足机器人.pdf
本发明公开了一种模块化自平衡双轮四足机器人,包括自行车本体,自行车本体上安装有电池和控制系统,其特征在于,所述自行车本体上还设有自平衡系统和四足系统,所述自平衡系统包括平衡组件和转向组件,所述平衡组件安装在车架头管前端,用于控制自行车平衡;所述转向组件固定在平衡组件上且与把手通过齿轮和皮带连接,转向组件通过控制把手的转动来控制自行车的转向;所述四足系统包括4个分别安装于前轮和后轮两侧具有三个自由度的四足组件,用于辅助自行车行走,本发明通过姿态传感器检测车身平衡状态和每足的运动状态,既能双轮行驶又能四足行走
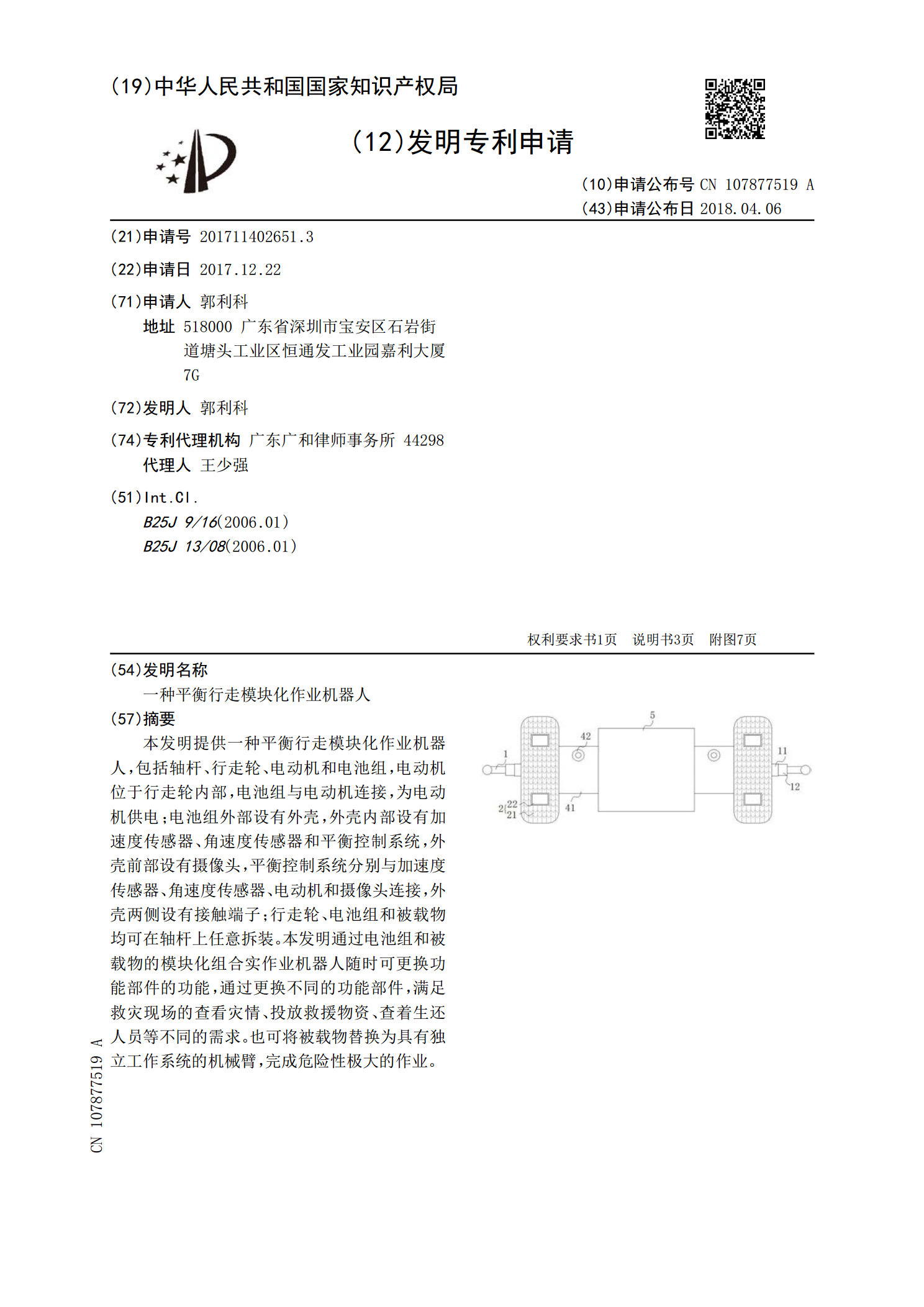
一种平衡行走模块化作业机器人.pdf
本发明提供一种平衡行走模块化作业机器人,包括轴杆、行走轮、电动机和电池组,电动机位于行走轮内部,电池组与电动机连接,为电动机供电;电池组外部设有外壳,外壳内部设有加速度传感器、角速度传感器和平衡控制系统,外壳前部设有摄像头,平衡控制系统分别与加速度传感器、角速度传感器、电动机和摄像头连接,外壳两侧设有接触端子;行走轮、电池组和被载物均可在轴杆上任意拆装。本发明通过电池组和被载物的模块化组合实作业机器人随时可更换功能部件的功能,通过更换不同的功能部件,满足救灾现场的查看灾情、投放救援物资、查着生还人员等不同

一种球形自平衡机器人.pdf
一种球形自平衡机器人,该机器人包括支架、行走球、支撑轮组件、驱动电机组件、控制器和蓄电池;所述的支架上布置有上下两层支撑轮组件,每层沿圆周方向相隔90°均布有四组支撑轮组件;通过支撑轮组件对行走球进行限位,保持支架可以绕行走球表面滑动;所述的支架上分别在纵向、横向和轴向布置有三组驱动电机组件,控制器接收控制指令后采集姿态检测器件的数据,运算后驱动电机转动,进而驱动行走球产生纵向、横向和回转方向的三个自由度的运动。机器人具有运动平稳、转向灵活、重量轻、结构简单的特性。

一种双轮自平衡机器人.pdf
本发明公开了一种双轮自平衡机器人,通过在机械结构上的改进,解决了现有技术中机器人只能在平缓地面运行,行驶有局限性的技术问题。所述双轮自平衡机器人包括车体,所述车体两侧安装有车轮,所述车体包括平行四边形架体,可倾斜变形,所述车体上安装有载物台,所述载物台与平行四边形架体铰接,所述平行四边形架体中安装有第一电机,所述第一电机驱动所述平行四边形架体根据路面情况做倾斜变形,所述载物台始终保持水平。本发明提供的双轮自平衡机器人,可以适应复杂路况,并且载物台始终保持水平,承载的物体不易脱落。