
一种智能管道机器人.pdf

含秀****66

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
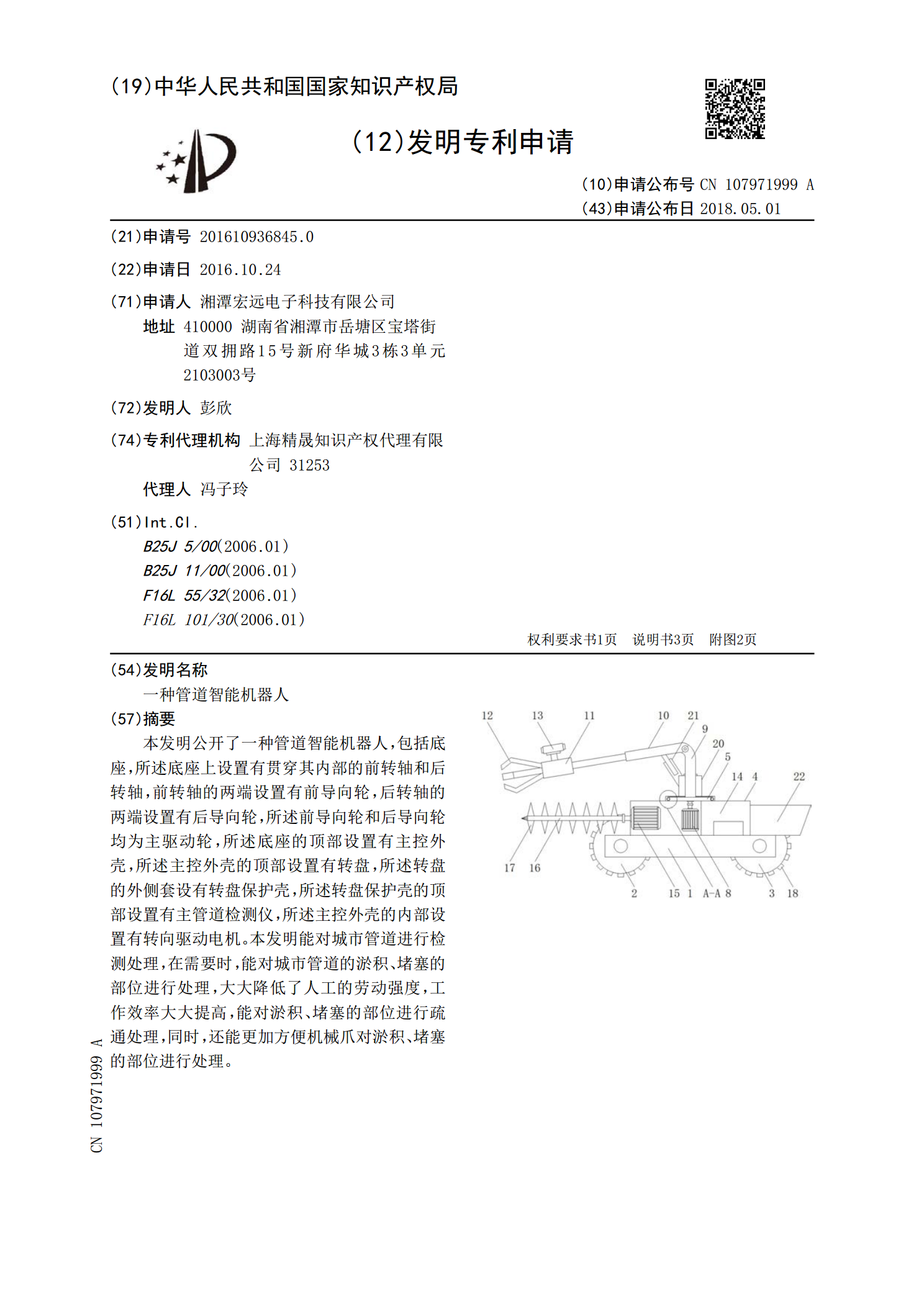
一种管道智能机器人.pdf
本发明公开了一种管道智能机器人,包括底座,所述底座上设置有贯穿其内部的前转轴和后转轴,前转轴的两端设置有前导向轮,后转轴的两端设置有后导向轮,所述前导向轮和后导向轮均为主驱动轮,所述底座的顶部设置有主控外壳,所述主控外壳的顶部设置有转盘,所述转盘的外侧套设有转盘保护壳,所述转盘保护壳的顶部设置有主管道检测仪,所述主控外壳的内部设置有转向驱动电机。本发明能对城市管道进行检测处理,在需要时,能对城市管道的淤积、堵塞的部位进行处理,大大降低了人工的劳动强度,工作效率大大提高,能对淤积、堵塞的部位进行疏通处理,同
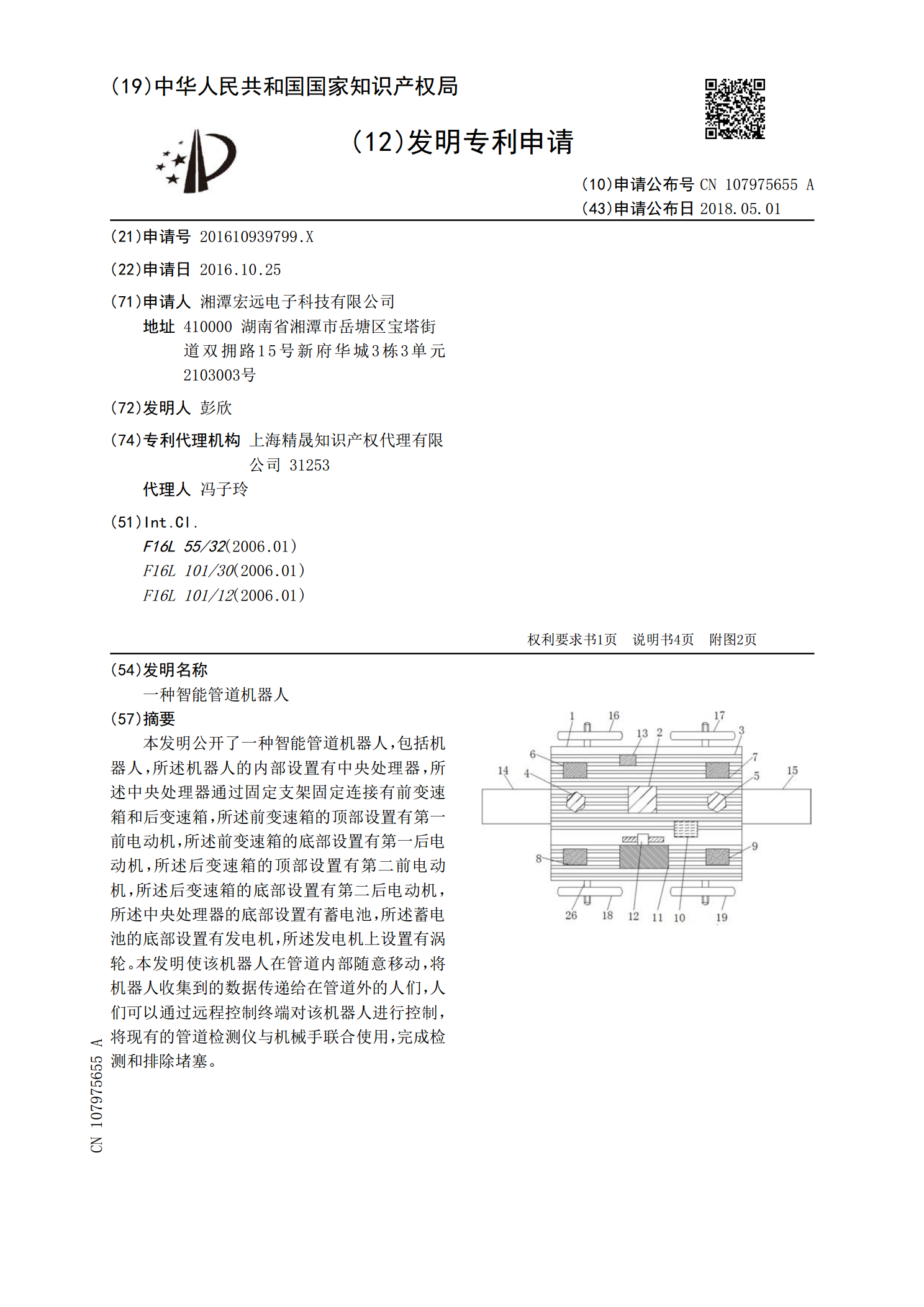
一种智能管道机器人.pdf
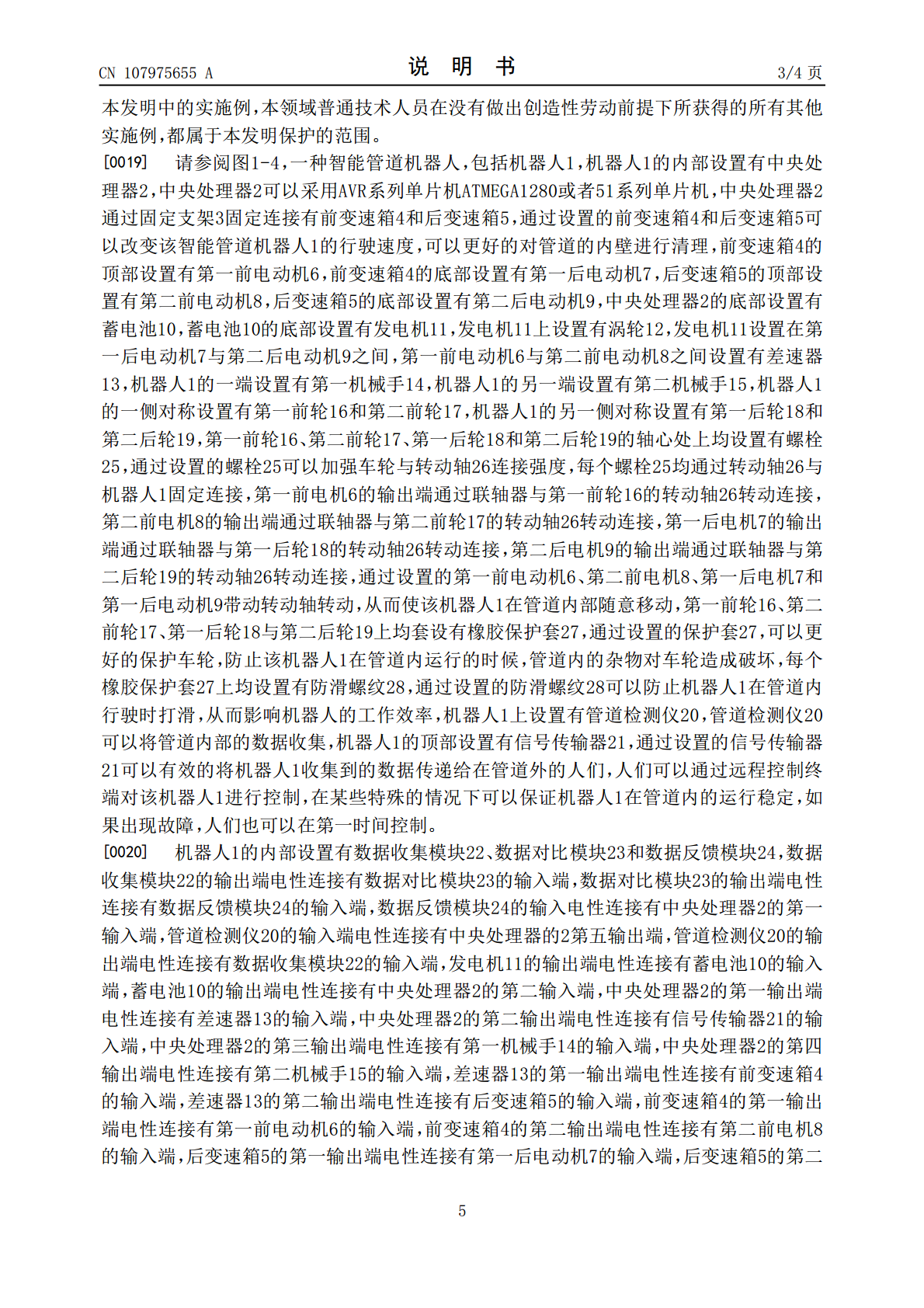
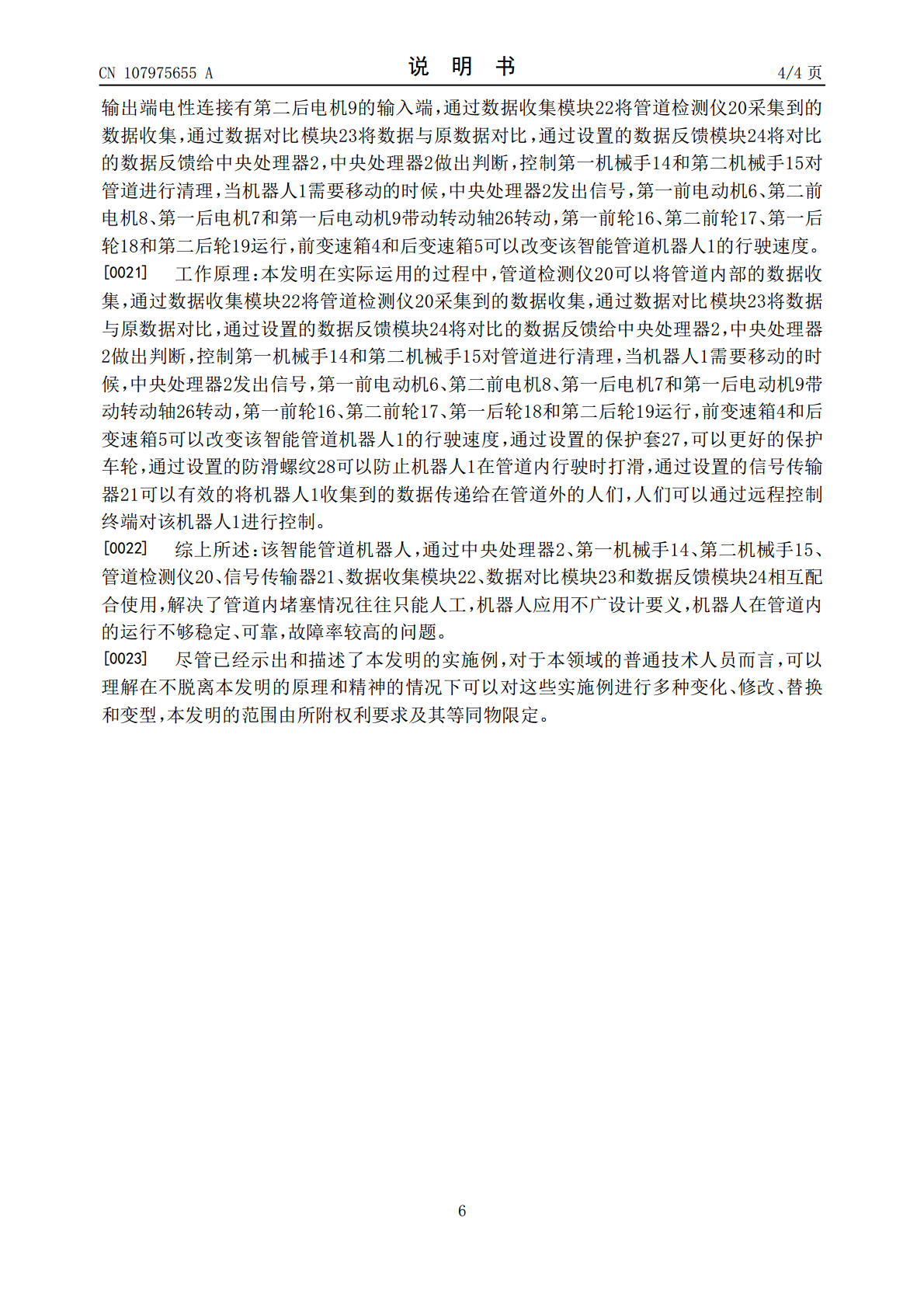
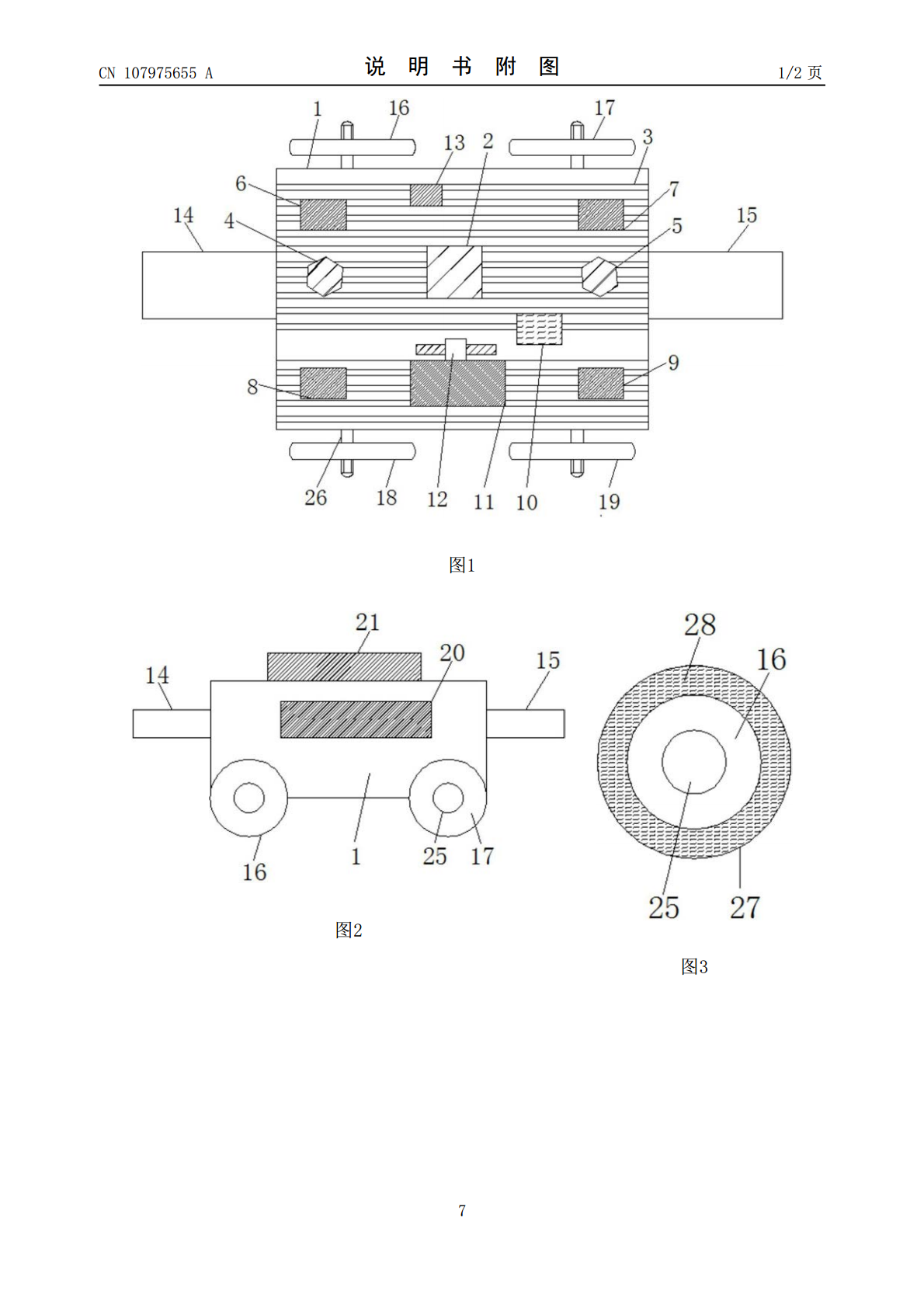
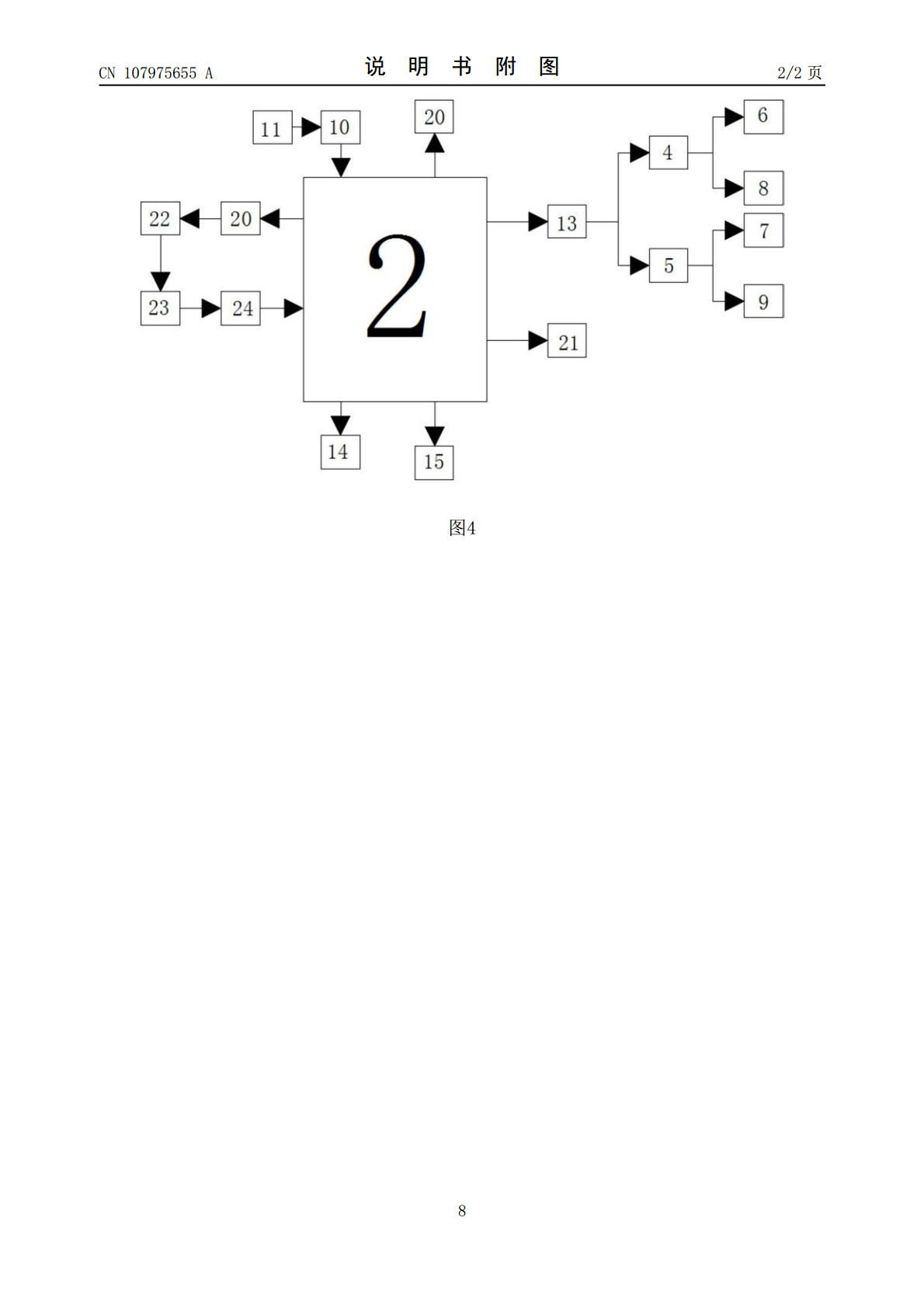
本发明公开了一种智能管道机器人,包括机器人,所述机器人的内部设置有中央处理器,所述中央处理器通过固定支架固定连接有前变速箱和后变速箱,所述前变速箱的顶部设置有第一前电动机,所述前变速箱的底部设置有第一后电动机,所述后变速箱的顶部设置有第二前电动机,所述后变速箱的底部设置有第二后电动机,所述中央处理器的底部设置有蓄电池,所述蓄电池的底部设置有发电机,所述发电机上设置有涡轮。本发明使该机器人在管道内部随意移动,将机器人收集到的数据传递给在管道外的人们,人们可以通过远程控制终端对该机器人进行控制,将现有的管道检
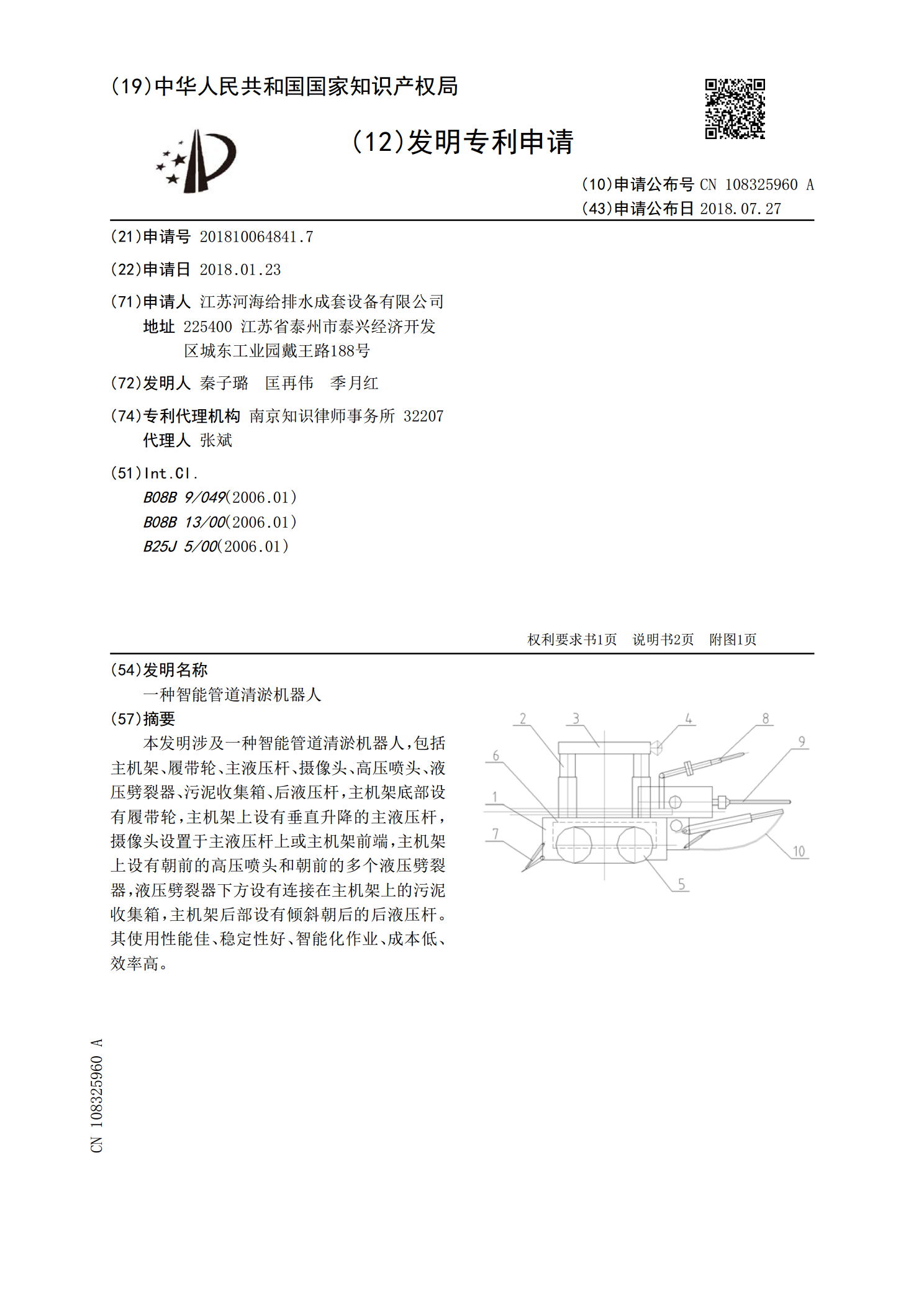
一种智能管道清淤机器人.pdf
本发明涉及一种智能管道清淤机器人,包括主机架、履带轮、主液压杆、摄像头、高压喷头、液压劈裂器、污泥收集箱、后液压杆,主机架底部设有履带轮,主机架上设有垂直升降的主液压杆,摄像头设置于主液压杆上或主机架前端,主机架上设有朝前的高压喷头和朝前的多个液压劈裂器,液压劈裂器下方设有连接在主机架上的污泥收集箱,主机架后部设有倾斜朝后的后液压杆。其使用性能佳、稳定性好、智能化作业、成本低、效率高。
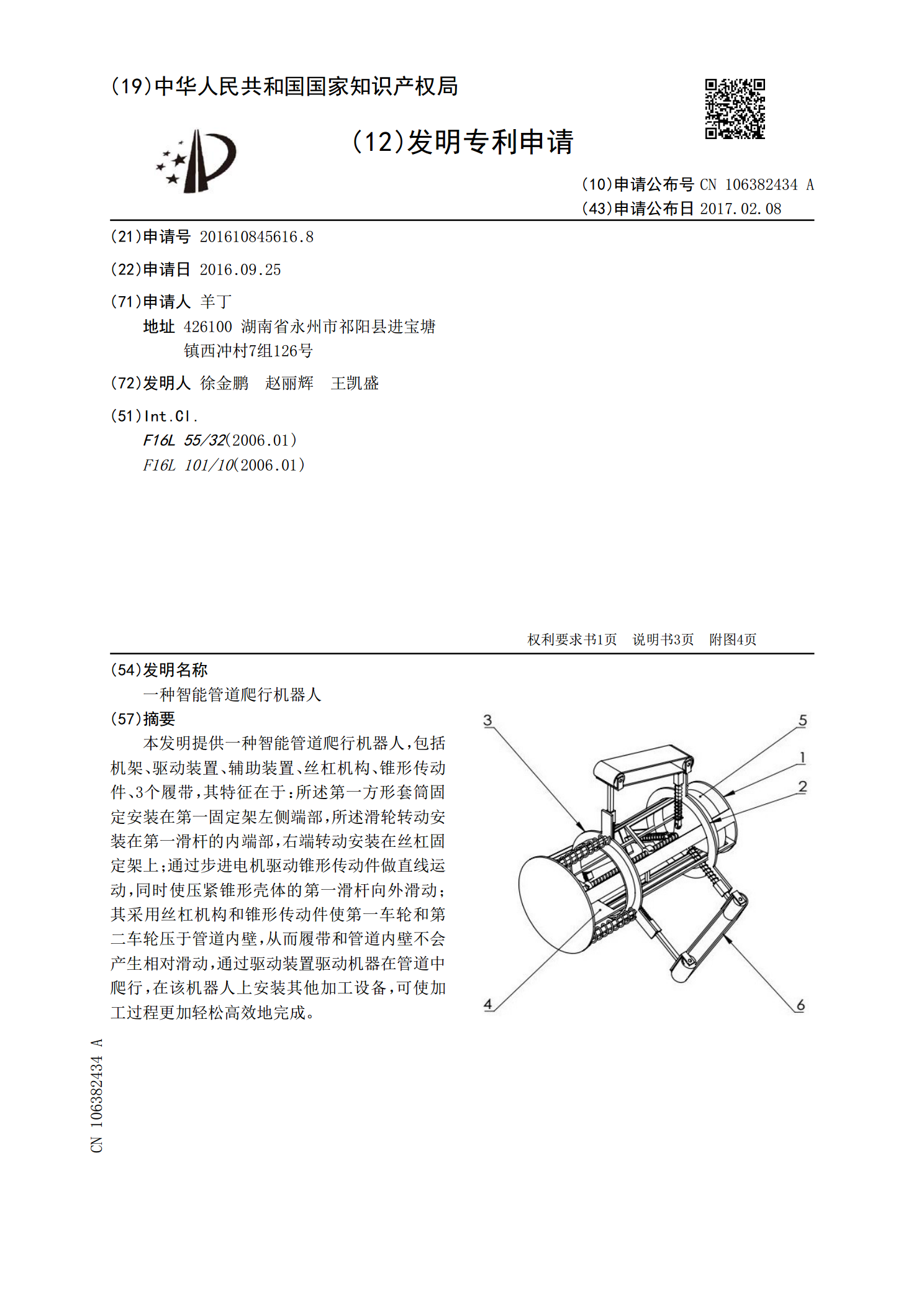
一种智能管道爬行机器人.pdf
本发明提供一种智能管道爬行机器人,包括机架、驱动装置、辅助装置、丝杠机构、锥形传动件、3个履带,其特征在于:所述第一方形套筒固定安装在第一固定架左侧端部,所述滑轮转动安装在第一滑杆的内端部,右端转动安装在丝杠固定架上;通过步进电机驱动锥形传动件做直线运动,同时使压紧锥形壳体的第一滑杆向外滑动;其采用丝杠机构和锥形传动件使第一车轮和第二车轮压于管道内壁,从而履带和管道内壁不会产生相对滑动,通过驱动装置驱动机器在管道中爬行,在该机器人上安装其他加工设备,可使加工过程更加轻松高效地完成。
一种电缆管道智能机器人.pdf
本发明涉及机器人设备技术领域,尤其是涉及一种电缆管道智能机器人。一种电缆管道智能机器人,包括壳体和控制器,壳体的底部前后两侧均对应设置有车轮,壳体上设置有搭载平台,搭载平台上设置有履带装置、调节仓和用于检测电缆的探测装置,调节仓包括内设有调节腔的仓体,调节腔内设置有平移电机,平移电机的输出轴连接有螺杆,螺杆上螺纹连接有螺母座,螺母座上固定连接有与搭载平台的上表面滑动连接的调节杆,所述的调节杆与与履带装置之间连接有调节臂,所述的调节臂的一端铰接在调节杆上,所述的调节臂的另一端铰接在履带装置上。本发明能够及时