
一种电动轮轮内减振系统参数优化方法.pdf

冬易****娘子


1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电动轮轮内减振系统参数优化方法.pdf
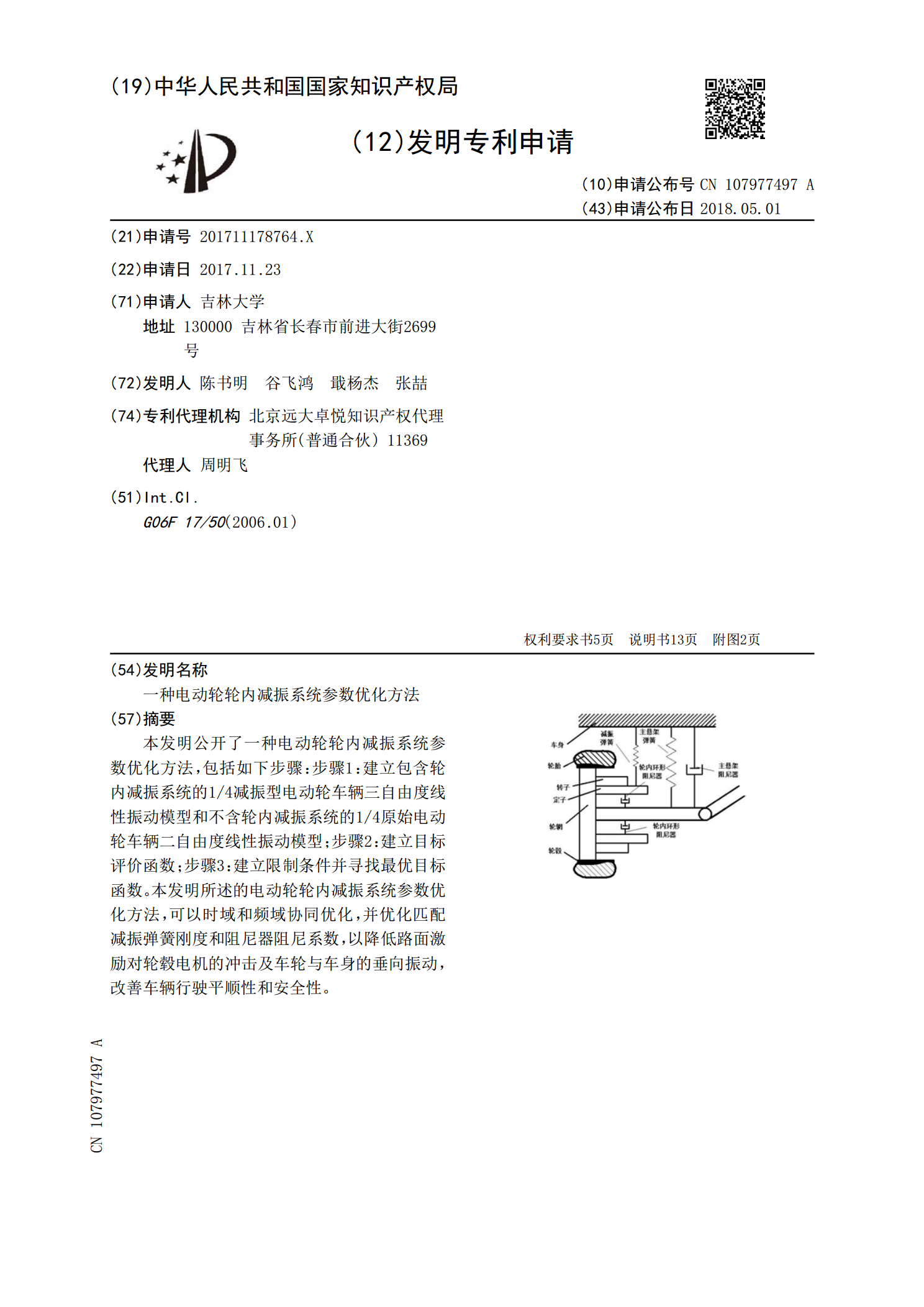
本发明公开了一种电动轮轮内减振系统参数优化方法,包括如下步骤:步骤1:建立包含轮内减振系统的1/4减振型电动轮车辆三自由度线性振动模型和不含轮内减振系统的1/4原始电动轮车辆二自由度线性振动模型;步骤2:建立目标评价函数;步骤3:建立限制条件并寻找最优目标函数。本发明所述的电动轮轮内减振系统参数优化方法,可以时域和频域协同优化,并优化匹配减振弹簧刚度和阻尼器阻尼系数,以降低路面激励对轮毂电机的冲击及车轮与车身的垂向振动,改善车辆行驶平顺性和安全性。
一种具备轮内减振功能的电动轮.pdf
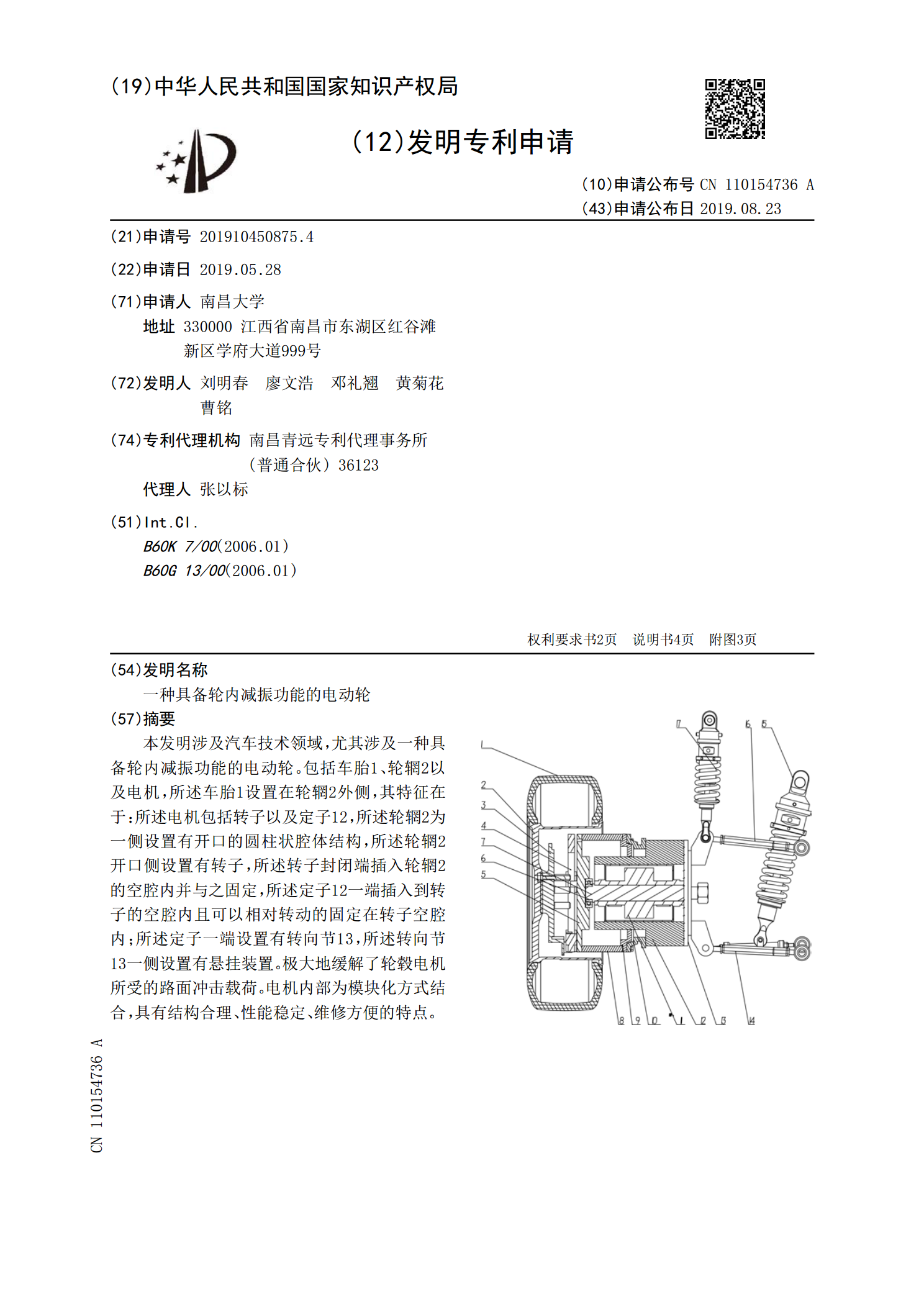
本发明涉及汽车技术领域,尤其涉及一种具备轮内减振功能的电动轮。包括车胎1、轮辋2以及电机,所述车胎1设置在轮辋2外侧,其特征在于:所述电机包括转子以及定子12,所述轮辋2为一侧设置有开口的圆柱状腔体结构,所述轮辋2开口侧设置有转子,所述转子封闭端插入轮辋2的空腔内并与之固定,所述定子12一端插入到转子的空腔内且可以相对转动的固定在转子空腔内;所述定子一端设置有转向节13,所述转向节13一侧设置有悬挂装置。极大地缓解了轮毂电机所受的路面冲击载荷。电机内部为模块化方式结合,具有结构合理、性能稳定、维修方便的特

一种轮毂电机车轮减振系统参数优化匹配方法.pdf
本发明公开了一种轮毂电机车轮减振系统参数优化匹配方法,该方法含有步骤:1)根据车辆平顺性四个评价指标来优化匹配电动轮减振系统参数;2)综合考虑改善车辆行驶舒适性和平顺性,建立统一适应度函数,并对参数进行进行约束和限制,利用参数优化算法获得步骤1)中期望的减振系统参数;3)采用粒子群算法获得最佳的减振系统参数。本发明公开的轮毂电机车轮减振系统参数优化匹配方法通过粒子群算法仿真优化得到轮内减振系统参数最优值,综合考虑具有与车身、车轴同时相连减振系统的电动轮,以能够改善车轮载荷和悬架动扰度的基本要求、降低车身加

一种减振主动轮.pdf
本发明涉及一种主动轮,尤其涉及一种减振主动轮。本发明采用的技术方案是:种减振主动轮,包括齿轮内轴,与所述齿轮内轴相连接的侧轮齿,与所述齿轮内轴另一端相连接的侧轮齿,还包括主轮齿,其特征在于:所述主轮齿与所述齿轮内轴之间通过减振部分连接,所述减振部分与所述齿轮内轴一体成型。本发明的优点是:在使用过程中有效的减少了齿轮在传输动力时的振动,从而降低了齿轮相互之间的磨损,增强了主动轮的使用寿命,进一步可以降低后期的维护成本。
一种减振系统及减振系统控制方法.pdf
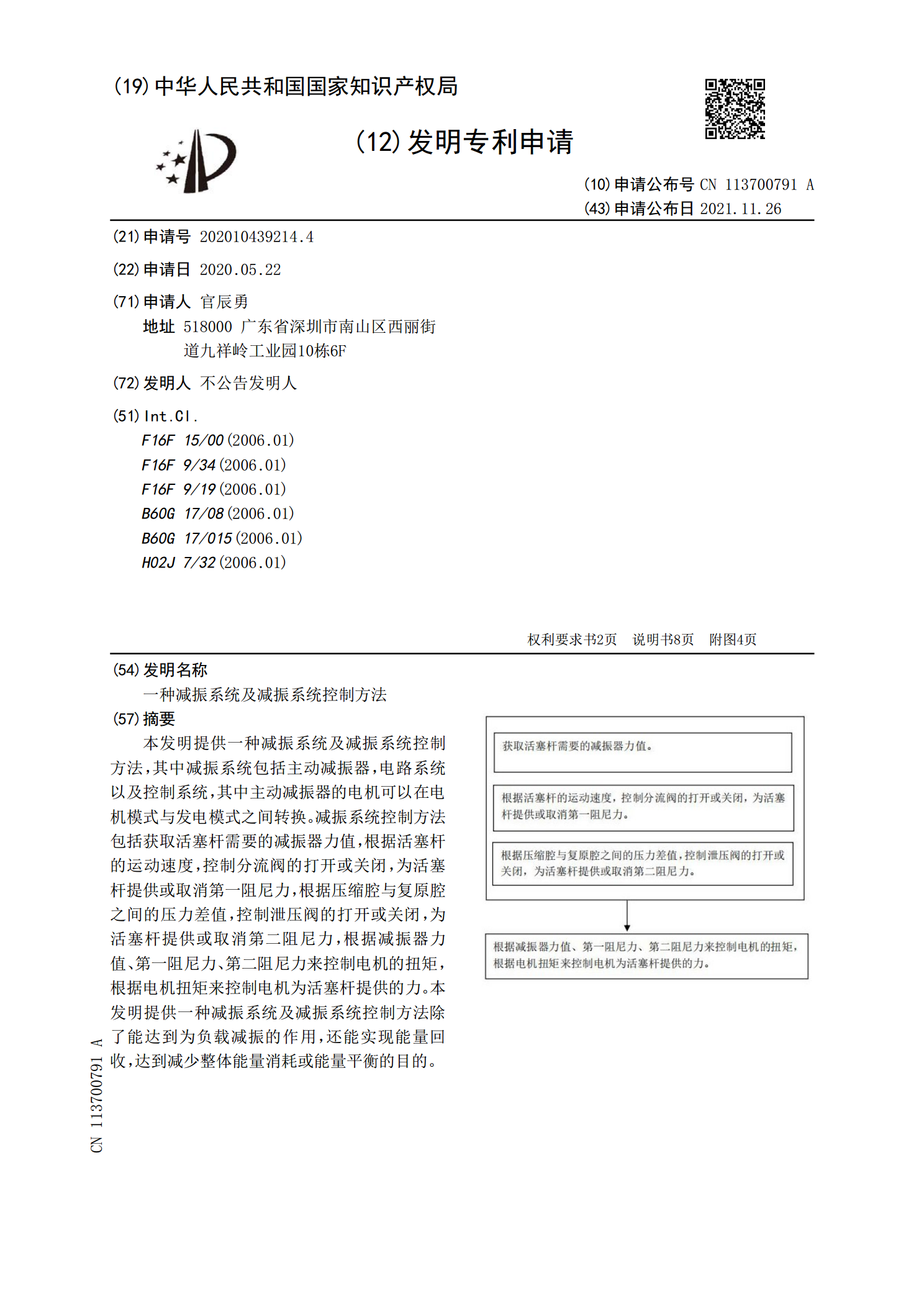
本发明提供一种减振系统及减振系统控制方法,其中减振系统包括主动减振器,电路系统以及控制系统,其中主动减振器的电机可以在电机模式与发电模式之间转换。减振系统控制方法包括获取活塞杆需要的减振器力值,根据活塞杆的运动速度,控制分流阀的打开或关闭,为活塞杆提供或取消第一阻尼力,根据压缩腔与复原腔之间的压力差值,控制泄压阀的打开或关闭,为活塞杆提供或取消第二阻尼力,根据减振器力值、第一阻尼力、第二阻尼力来控制电机的扭矩,根据电机扭矩来控制电机为活塞杆提供的力。本发明提供一种减振系统及减振系统控制方法除了能达到为负载