
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法.pdf

文光****iu


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法.pdf
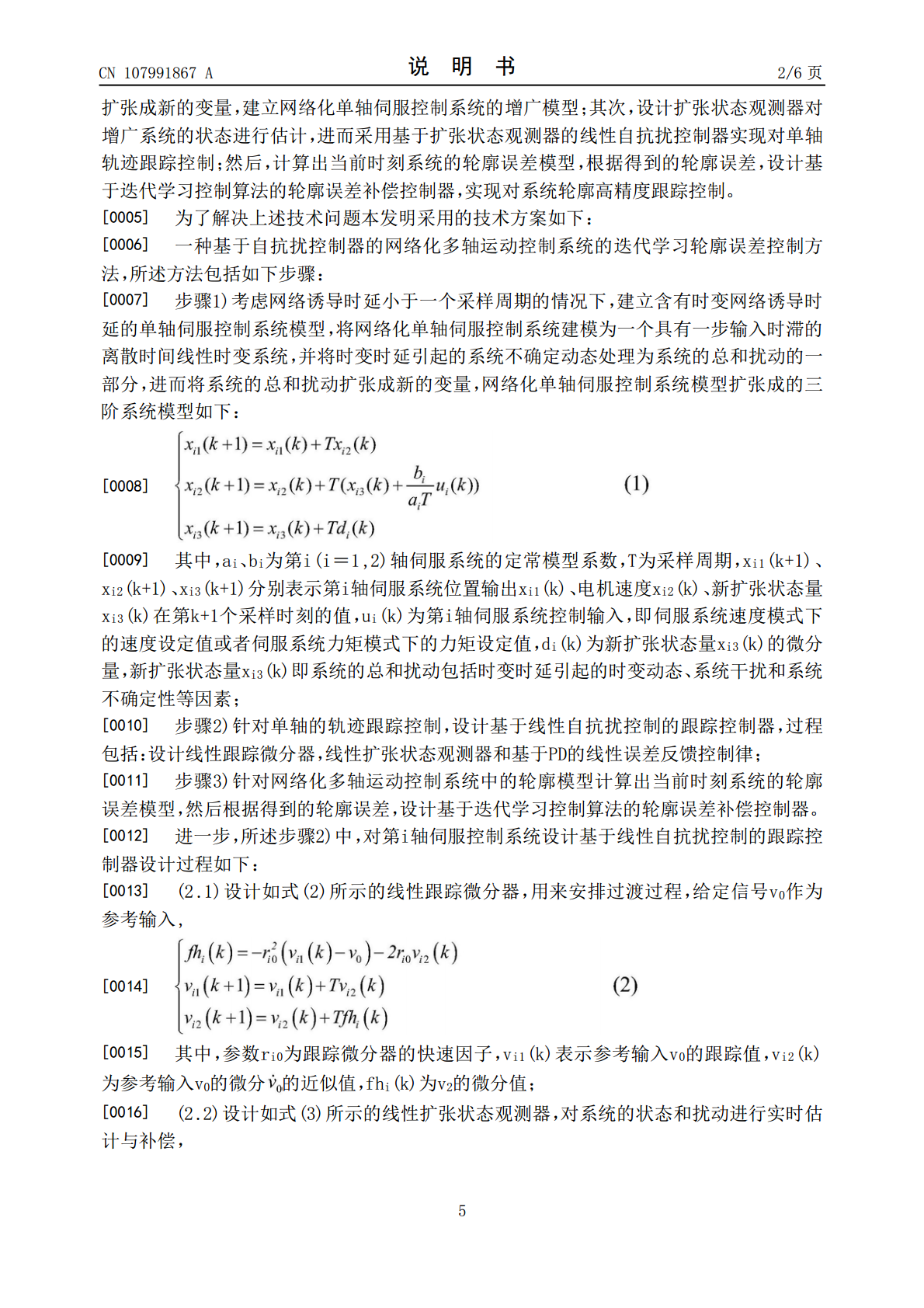
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法,该方法首先将时变时延引起的系统不确定动态处理为系统的总和扰动的一部分,并将系统的总和扰动扩张成新的变量,建立网络化单轴伺服控制系统的增广模型;其次,设计扩张状态观测器对增广系统的状态进行估计,进而采用基于扩张状态观测器的线性自抗扰控制器实现对单轴轨迹跟踪控制;然后,计算出当前时刻系统的轮廓误差模型,根据得到的轮廓误差,设计基于迭代学习控制算法的轮廓误差补偿控制器,实现对系统轮廓高精度跟踪控制。本发明具有良好的单轴轨迹跟踪控制性能,以及
一种多轴运动系统的轮廓误差控制器及其控制方法.pdf
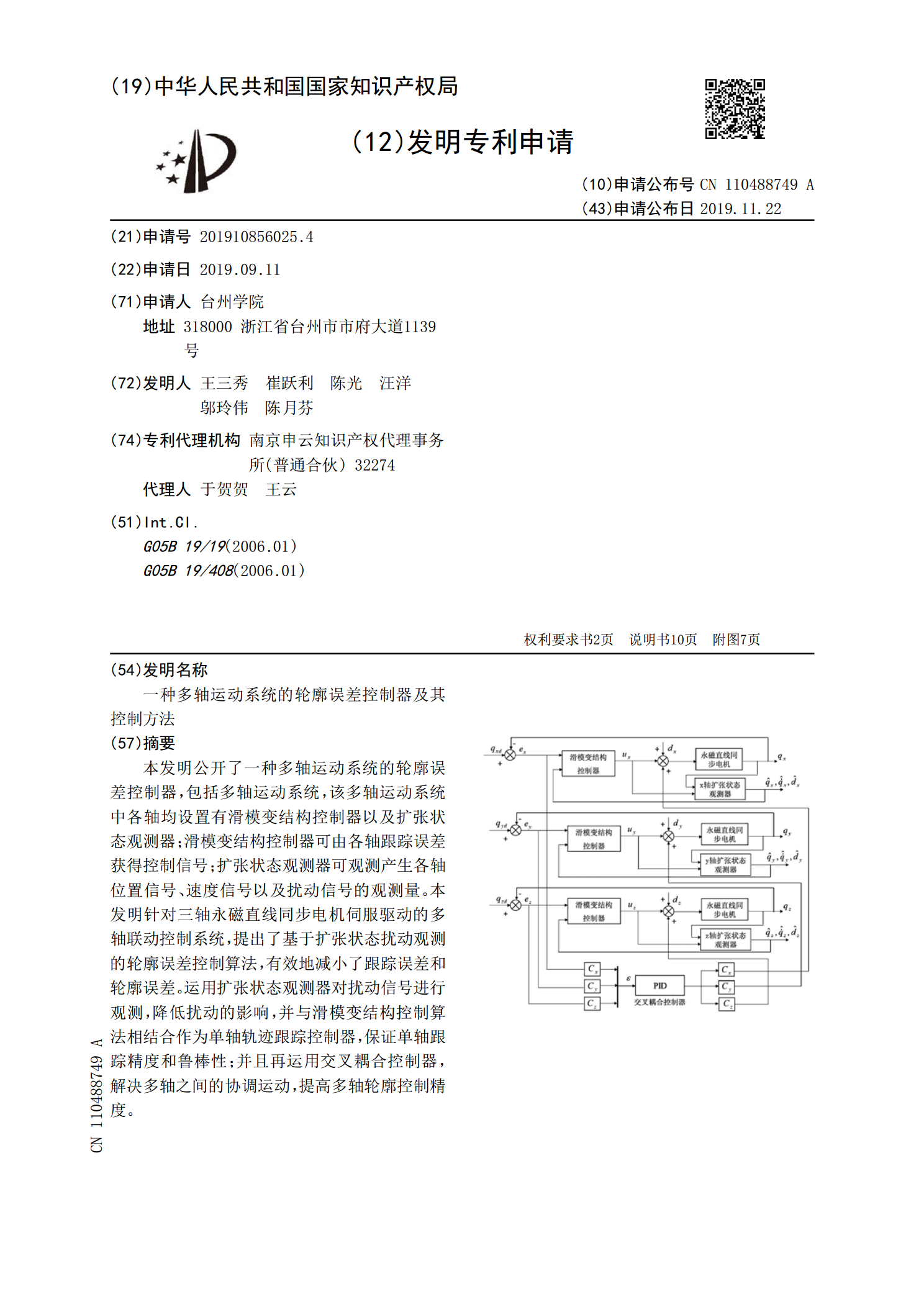
本发明公开了一种多轴运动系统的轮廓误差控制器,包括多轴运动系统,该多轴运动系统中各轴均设置有滑模变结构控制器以及扩张状态观测器;滑模变结构控制器可由各轴跟踪误差获得控制信号;扩张状态观测器可观测产生各轴位置信号、速度信号以及扰动信号的观测量。本发明针对三轴永磁直线同步电机伺服驱动的多轴联动控制系统,提出了基于扩张状态扰动观测的轮廓误差控制算法,有效地减小了跟踪误差和轮廓误差。运用扩张状态观测器对扰动信号进行观测,降低扰动的影响,并与滑模变结构控制算法相结合作为单轴轨迹跟踪控制器,保证单轴跟踪精度和鲁棒性;

一种基于ESO的网络化运动控制系统迭代学习高精度轮廓跟踪控制方法.pdf
一种基于ESO的网络化运动控制系统迭代学习高精度轮廓跟踪控制方法,包括以下步骤:1)建立扩张的三阶离散系统模型,利用状态扩张观测器(ESO)对系统干扰进行估计;2)2)针对网络化单轴跟踪控制,采用反馈辅助型开闭环迭代学习控制策略,并结合ESO消除非周期性干扰的影响,实现高精度网络化单轴跟踪控制;3)在单轴跟踪控制的基础上,针对轮廓误差控制,设计PD型交叉耦合控制器,采用ILC+ESO+CCC策略,实现高精度网络化轮廓跟踪控制。本发明在有效提高迭代收敛速度,实现网络化运动控制系统的高精度单轴轨迹跟踪控制和高

一种基于比例谐振控制器优化的自抗扰控制方法.pdf
一种基于比例谐振控制器优化的自抗扰控制方法,它属于电机控制技术领域。本发明同时解决了传统永磁同步电机驱动系统中外部扰动和内部扰动造成转速波动的问题。本发明对线性自抗扰控制器进行改进,利用含有准谐振调节器的比例谐振控制器取代原线性自抗扰控制器中的比例控制器,不仅保留了传统线性自抗扰控制器能够有效的观测突变扰动和低频扰动并进行前馈补偿的优点,同时抑制了内部扰动造成的转速波动,实现对系统的高性能控制。相对于传统的比例积分控制器,本发明方法可以使得转速跌落减小55%以及转速波动减小到0.5转内。本发明可以应用于电

基于自抗扰控制器的城轨牵引控制方法研究.pptx
汇报人:CONTENTS添加章节标题自抗扰控制器的原理控制器的基本结构控制器的工作原理控制器的主要特点控制器的应用范围城轨牵引控制系统的特点城轨交通的特点城轨牵引控制系统的组成城轨牵引控制系统的功能城轨牵引控制系统的要求基于自抗扰控制器的城轨牵引控制方法设计控制方法的设计思路控制器的参数调整控制算法的实现过程控制效果的评价指标仿真实验与分析实验条件与实验设置实验结果与分析控制方法的优势与局限性分析控制方法的改进方向与展望结论研究成果总结对未来研究的建议与展望汇报人: