
一种多轴运动系统的轮廓误差控制器及其控制方法.pdf

子安****吖吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多轴运动系统的轮廓误差控制器及其控制方法.pdf
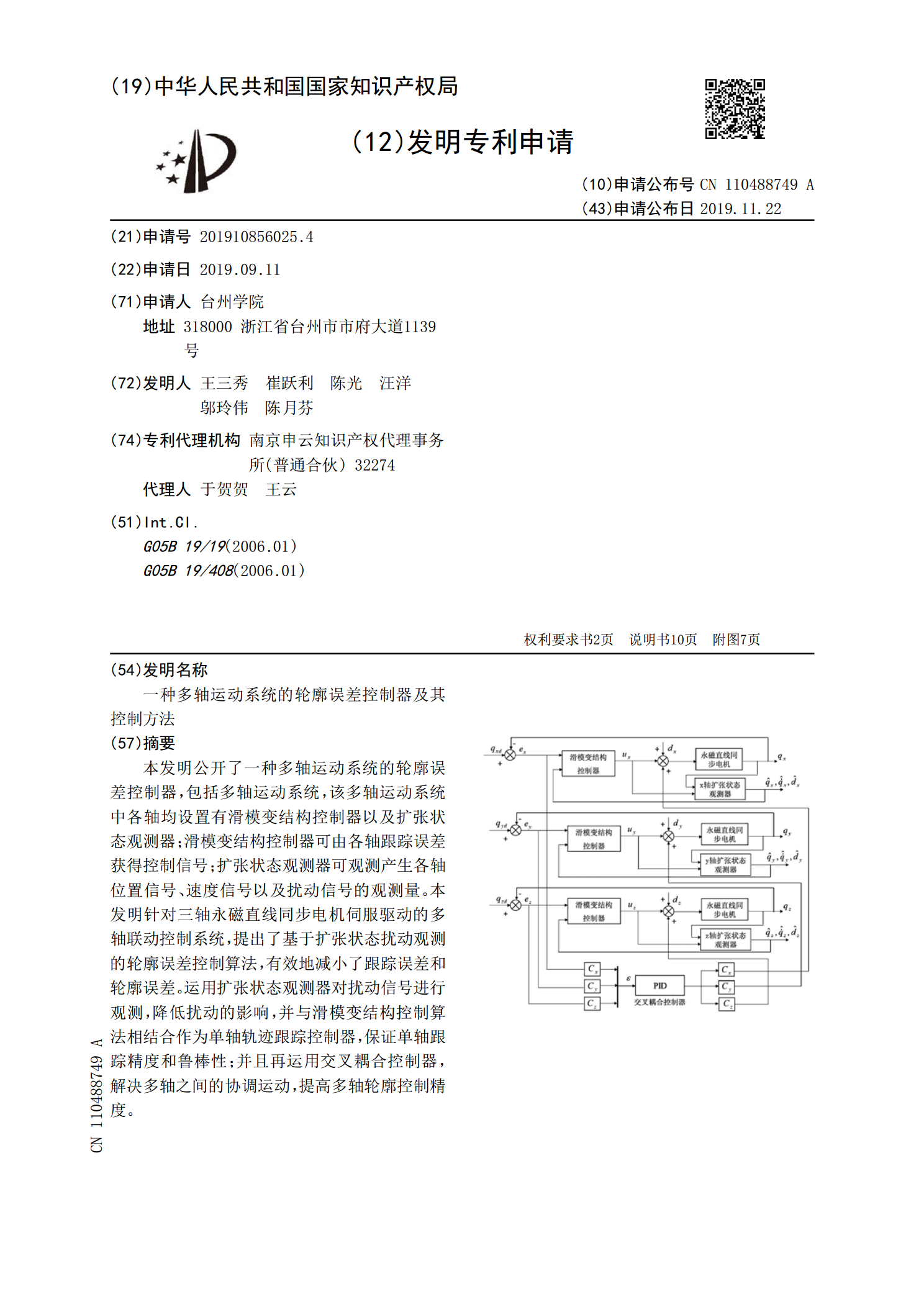
本发明公开了一种多轴运动系统的轮廓误差控制器,包括多轴运动系统,该多轴运动系统中各轴均设置有滑模变结构控制器以及扩张状态观测器;滑模变结构控制器可由各轴跟踪误差获得控制信号;扩张状态观测器可观测产生各轴位置信号、速度信号以及扰动信号的观测量。本发明针对三轴永磁直线同步电机伺服驱动的多轴联动控制系统,提出了基于扩张状态扰动观测的轮廓误差控制算法,有效地减小了跟踪误差和轮廓误差。运用扩张状态观测器对扰动信号进行观测,降低扰动的影响,并与滑模变结构控制算法相结合作为单轴轨迹跟踪控制器,保证单轴跟踪精度和鲁棒性;
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法.pdf
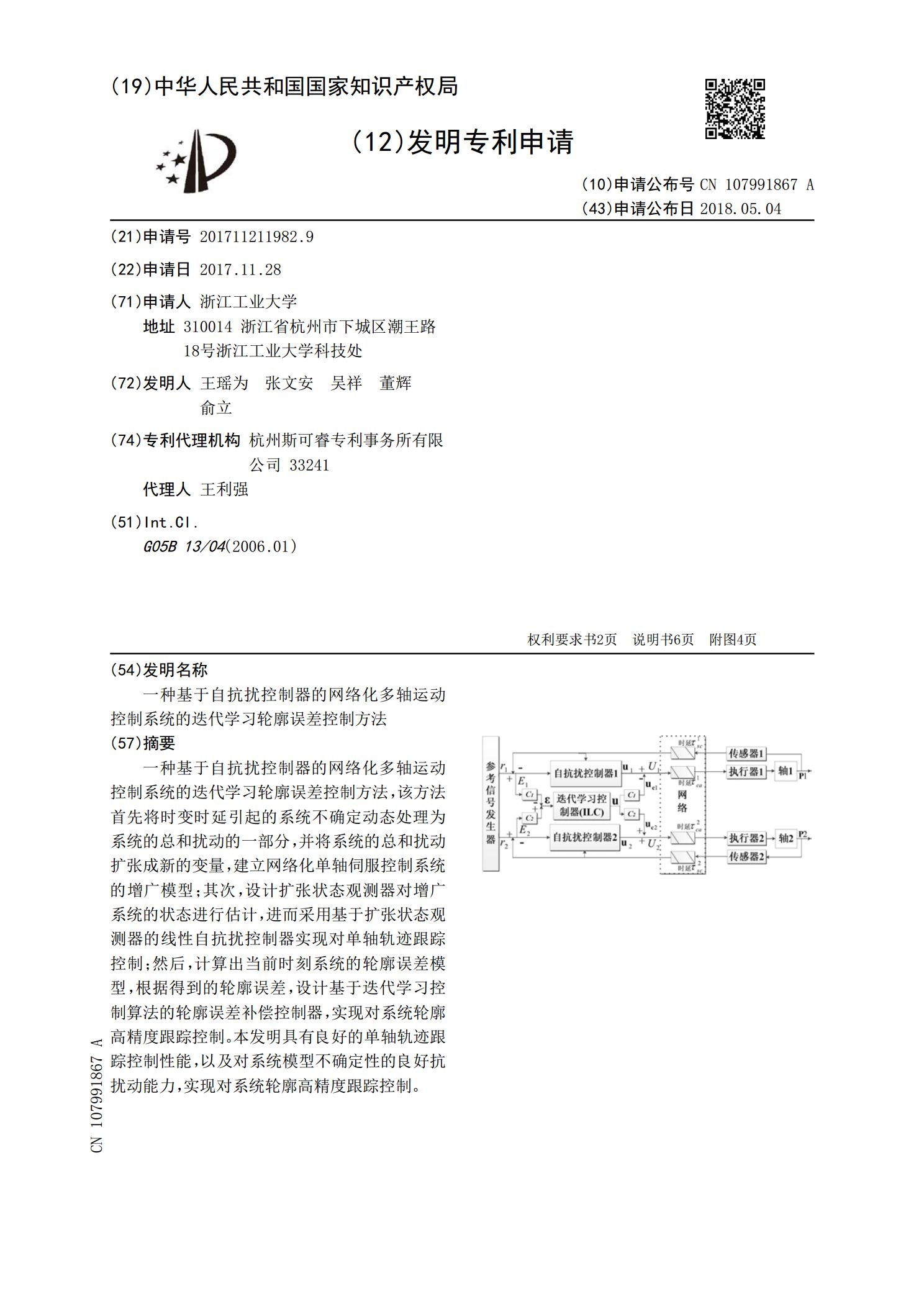
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法,该方法首先将时变时延引起的系统不确定动态处理为系统的总和扰动的一部分,并将系统的总和扰动扩张成新的变量,建立网络化单轴伺服控制系统的增广模型;其次,设计扩张状态观测器对增广系统的状态进行估计,进而采用基于扩张状态观测器的线性自抗扰控制器实现对单轴轨迹跟踪控制;然后,计算出当前时刻系统的轮廓误差模型,根据得到的轮廓误差,设计基于迭代学习控制算法的轮廓误差补偿控制器,实现对系统轮廓高精度跟踪控制。本发明具有良好的单轴轨迹跟踪控制性能,以及
一种基于CAN网络的多轴数控系统的轮廓误差控制方法.pdf
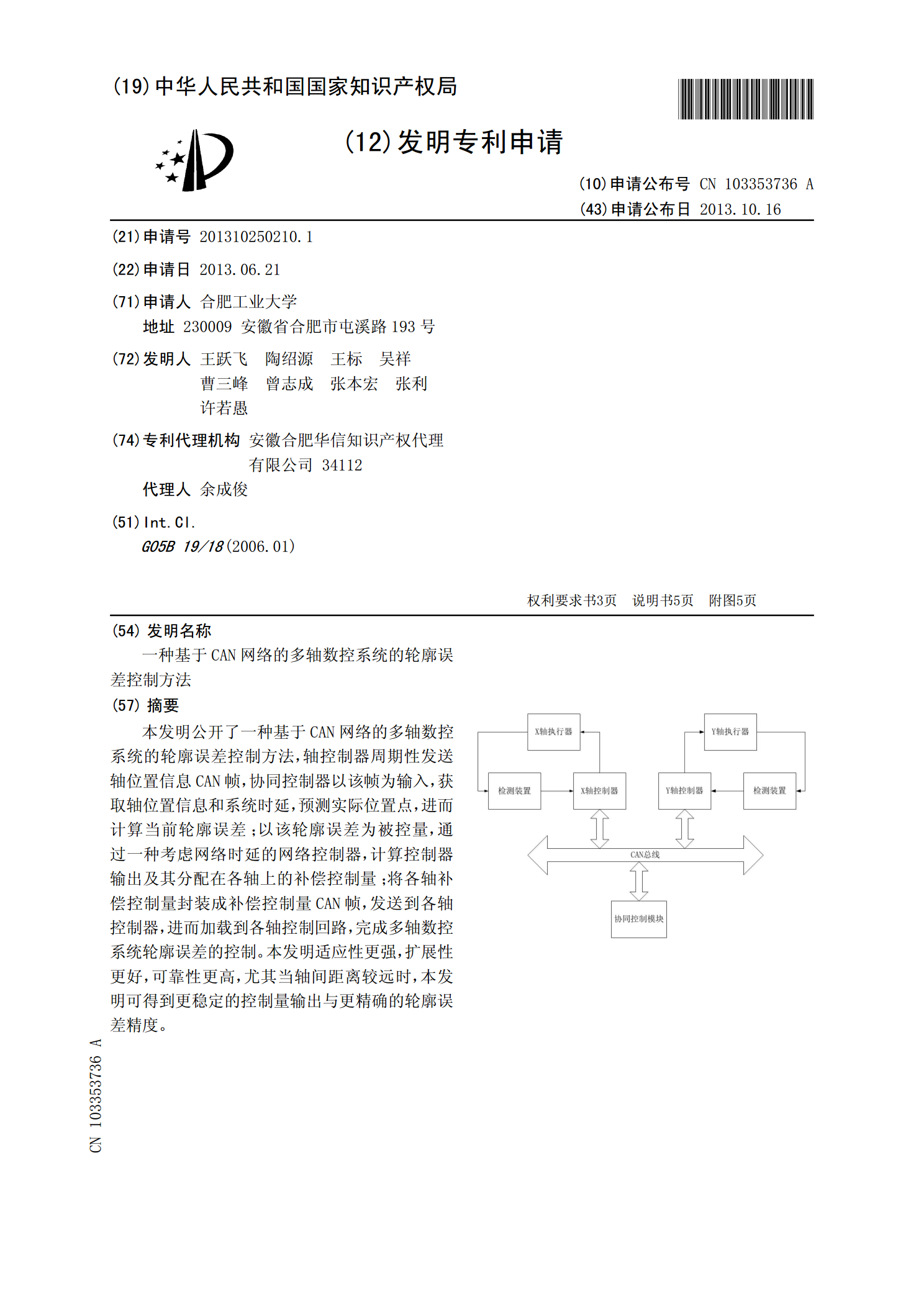
本发明公开了一种基于CAN网络的多轴数控系统的轮廓误差控制方法,轴控制器周期性发送轴位置信息CAN帧,协同控制器以该帧为输入,获取轴位置信息和系统时延,预测实际位置点,进而计算当前轮廓误差;以该轮廓误差为被控量,通过一种考虑网络时延的网络控制器,计算控制器输出及其分配在各轴上的补偿控制量;将各轴补偿控制量封装成补偿控制量CAN帧,发送到各轴控制器,进而加载到各轴控制回路,完成多轴数控系统轮廓误差的控制。本发明适应性更强,扩展性更好,可靠性更高,尤其当轴间距离较远时,本发明可得到更稳定的控制量输出与更精确的
一种多轴联动轮廓误差的实时检测方法.pdf
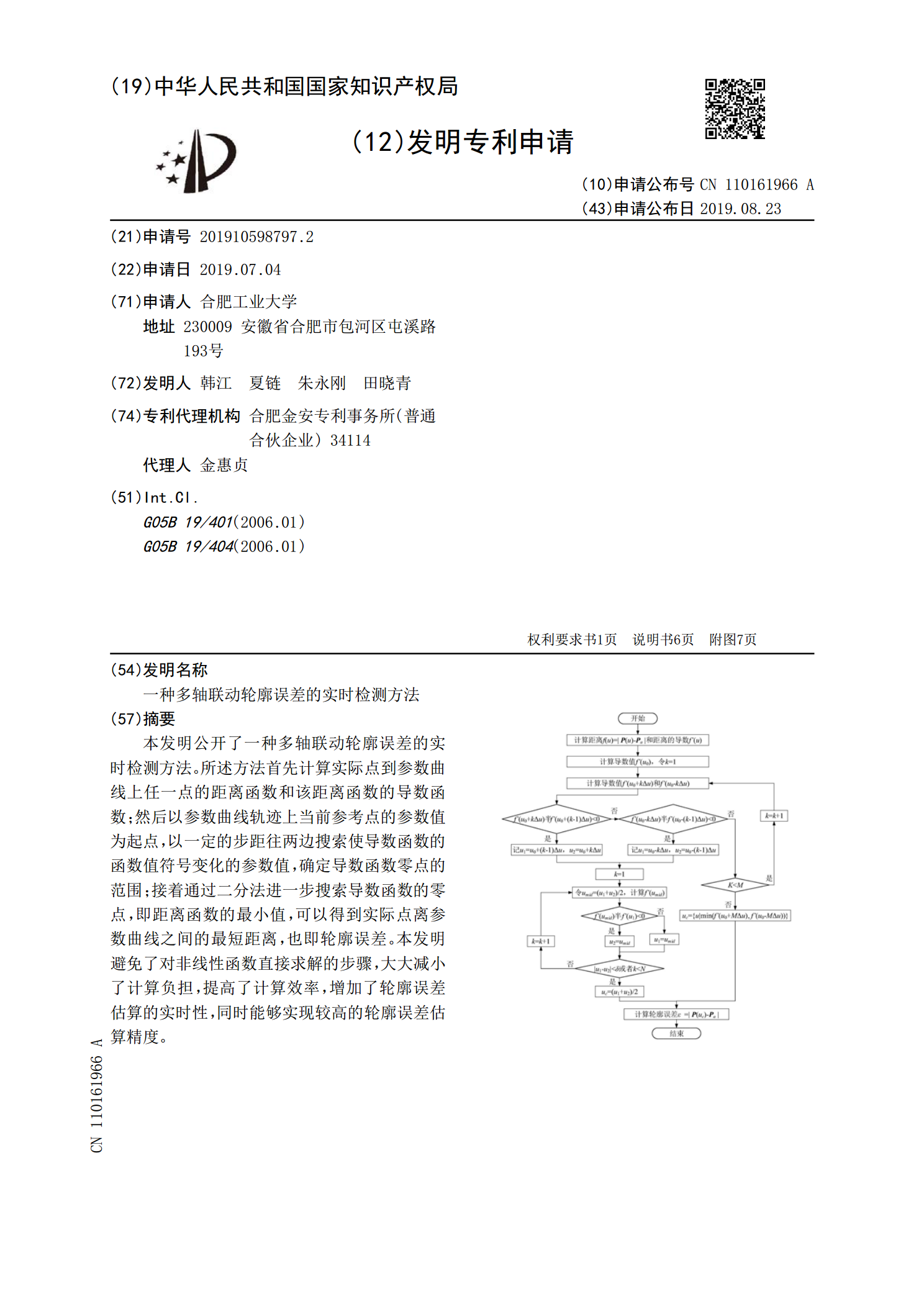
本发明公开了一种多轴联动轮廓误差的实时检测方法。所述方法首先计算实际点到参数曲线上任一点的距离函数和该距离函数的导数函数;然后以参数曲线轨迹上当前参考点的参数值为起点,以一定的步距往两边搜索使导数函数的函数值符号变化的参数值,确定导数函数零点的范围;接着通过二分法进一步搜索导数函数的零点,即距离函数的最小值,可以得到实际点离参数曲线之间的最短距离,也即轮廓误差。本发明避免了对非线性函数直接求解的步骤,大大减小了计算负担,提高了计算效率,增加了轮廓误差估算的实时性,同时能够实现较高的轮廓误差估算精度。
一种多轴运动控制器.pdf
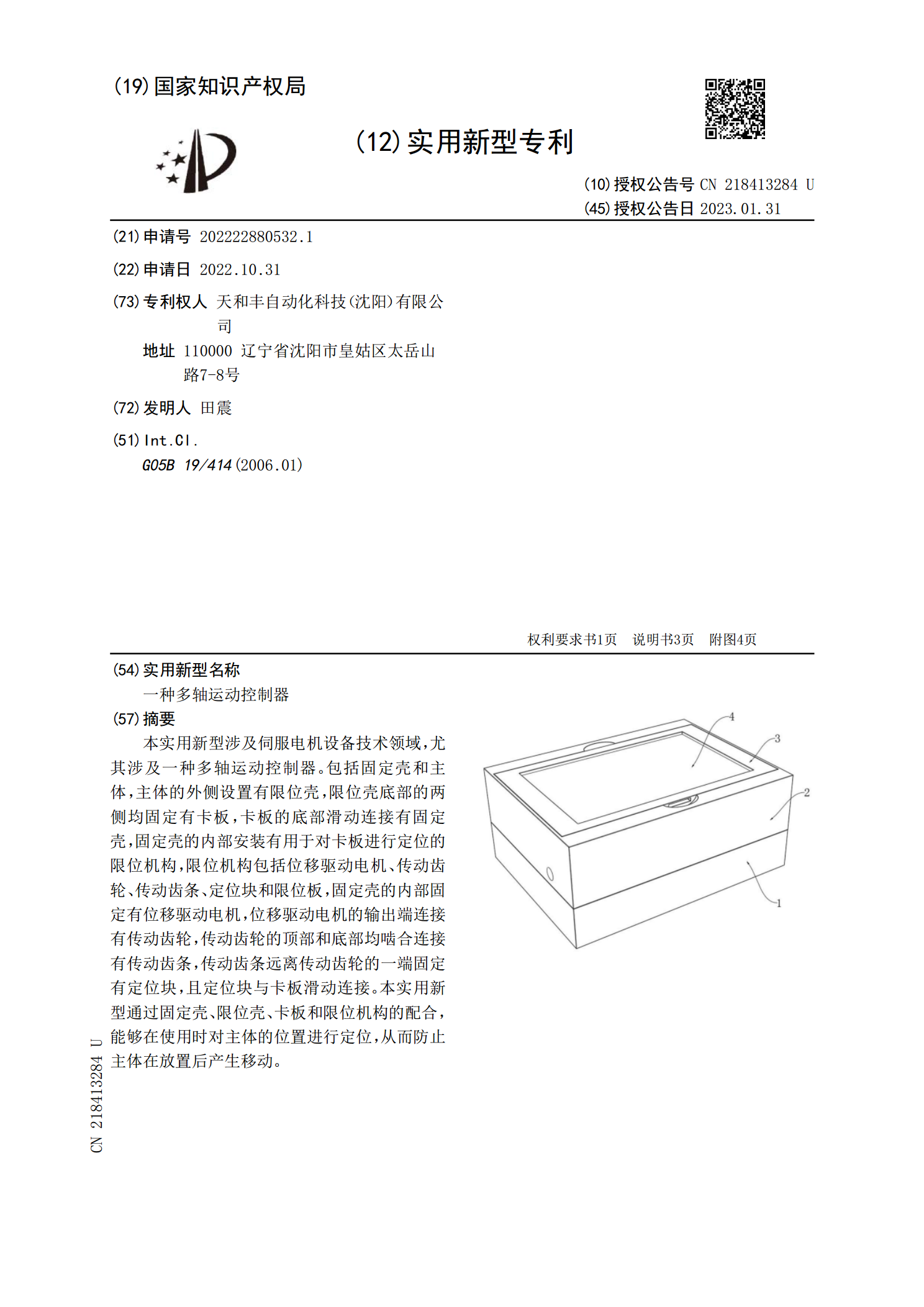
本实用新型涉及伺服电机设备技术领域,尤其涉及一种多轴运动控制器。包括固定壳和主体,主体的外侧设置有限位壳,限位壳底部的两侧均固定有卡板,卡板的底部滑动连接有固定壳,固定壳的内部安装有用于对卡板进行定位的限位机构,限位机构包括位移驱动电机、传动齿轮、传动齿条、定位块和限位板,固定壳的内部固定有位移驱动电机,位移驱动电机的输出端连接有传动齿轮,传动齿轮的顶部和底部均啮合连接有传动齿条,传动齿条远离传动齿轮的一端固定有定位块,且定位块与卡板滑动连接。本实用新型通过固定壳、限位壳、卡板和限位机构的配合,能够在使用