
一种基于ESO的网络化运动控制系统迭代学习高精度轮廓跟踪控制方法.pdf

醉香****mm

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于ESO的网络化运动控制系统迭代学习高精度轮廓跟踪控制方法.pdf
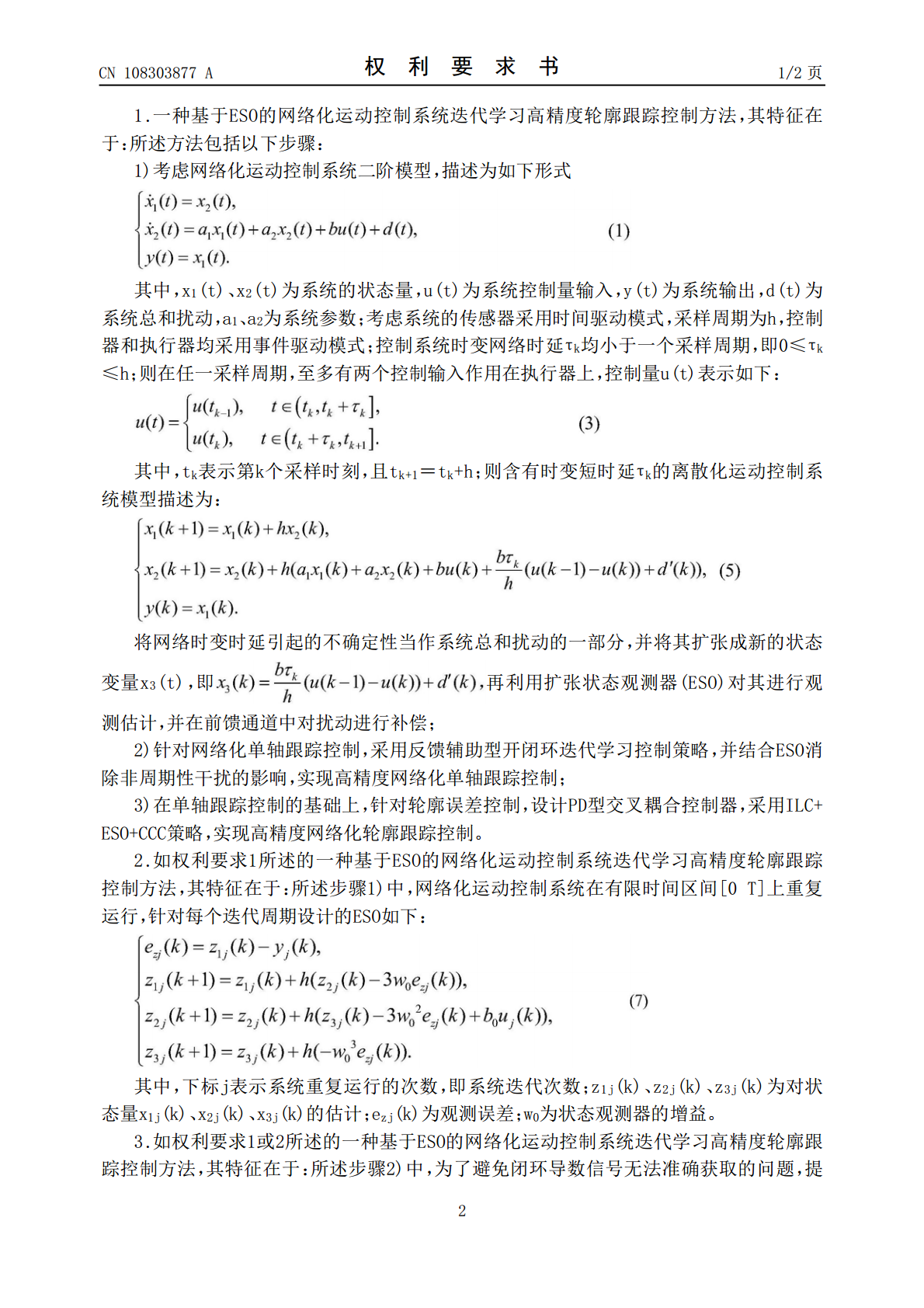
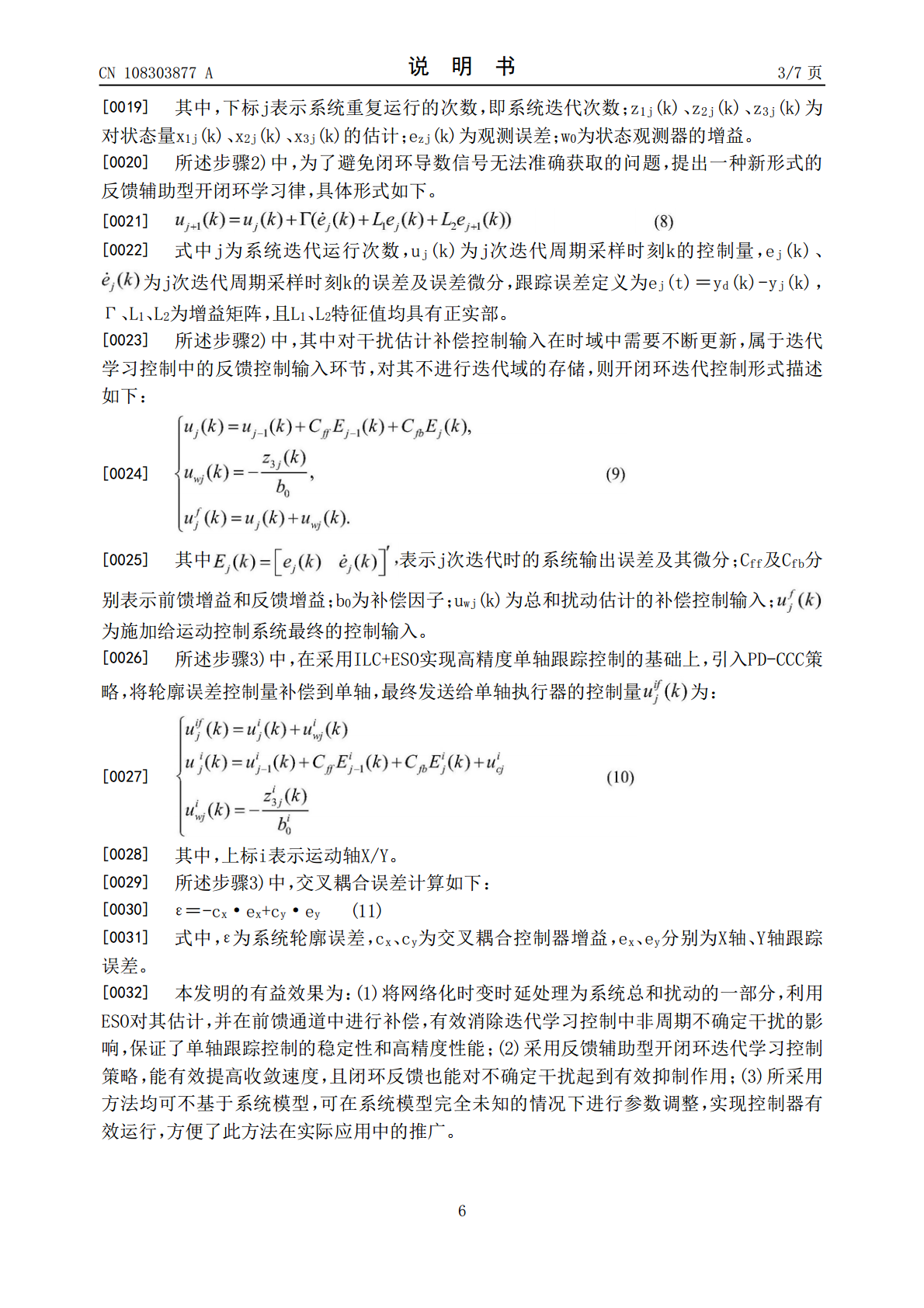
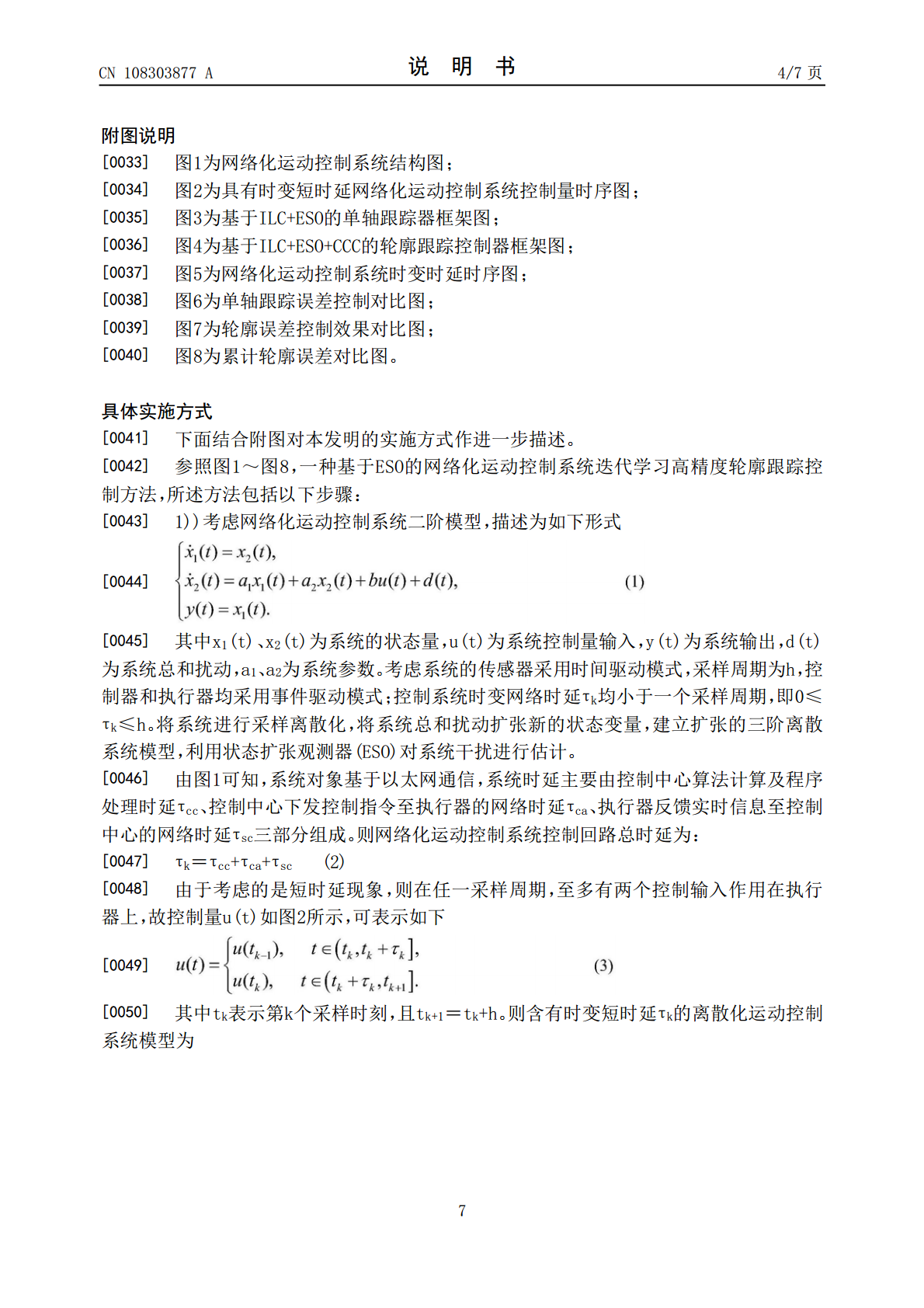
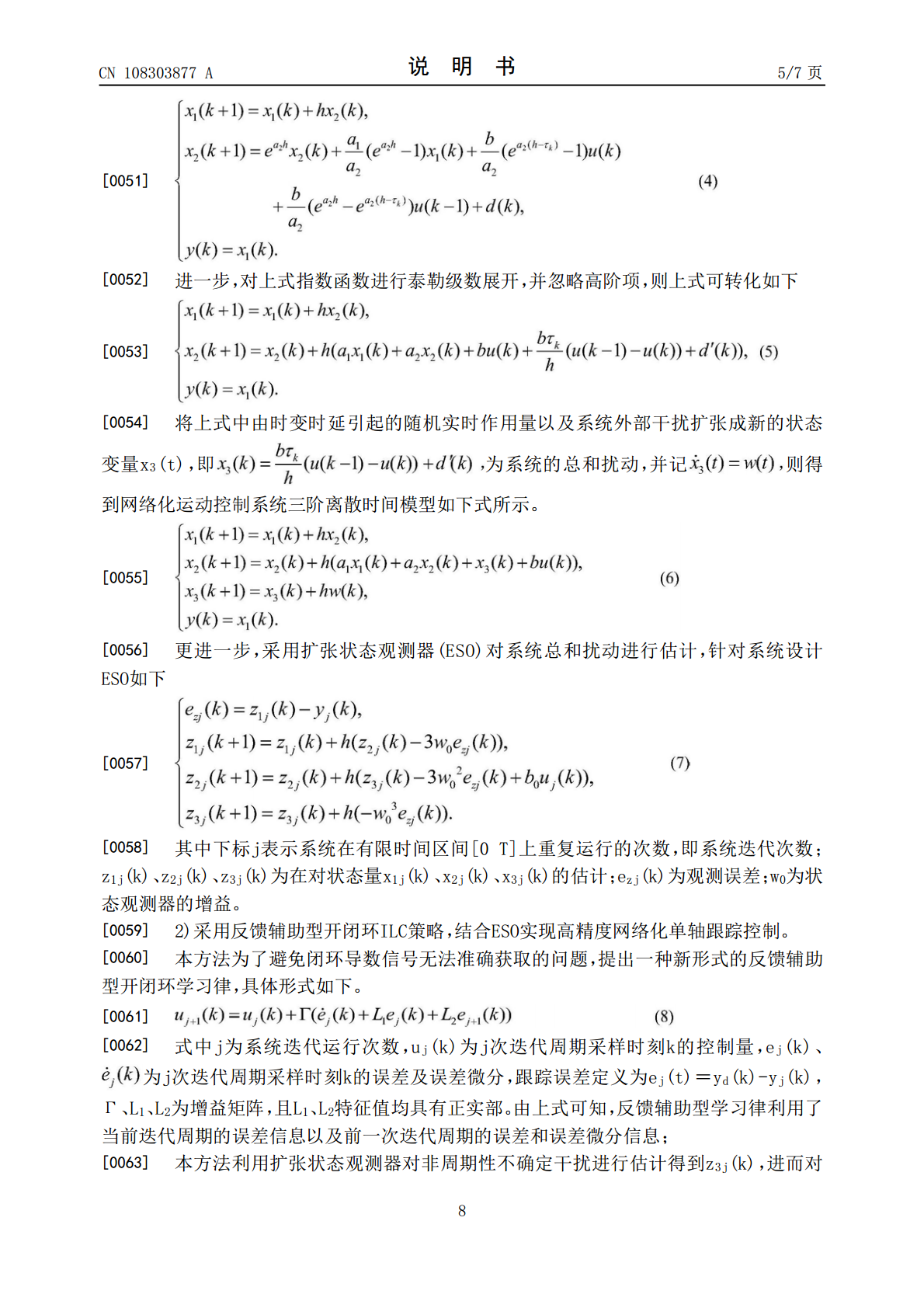
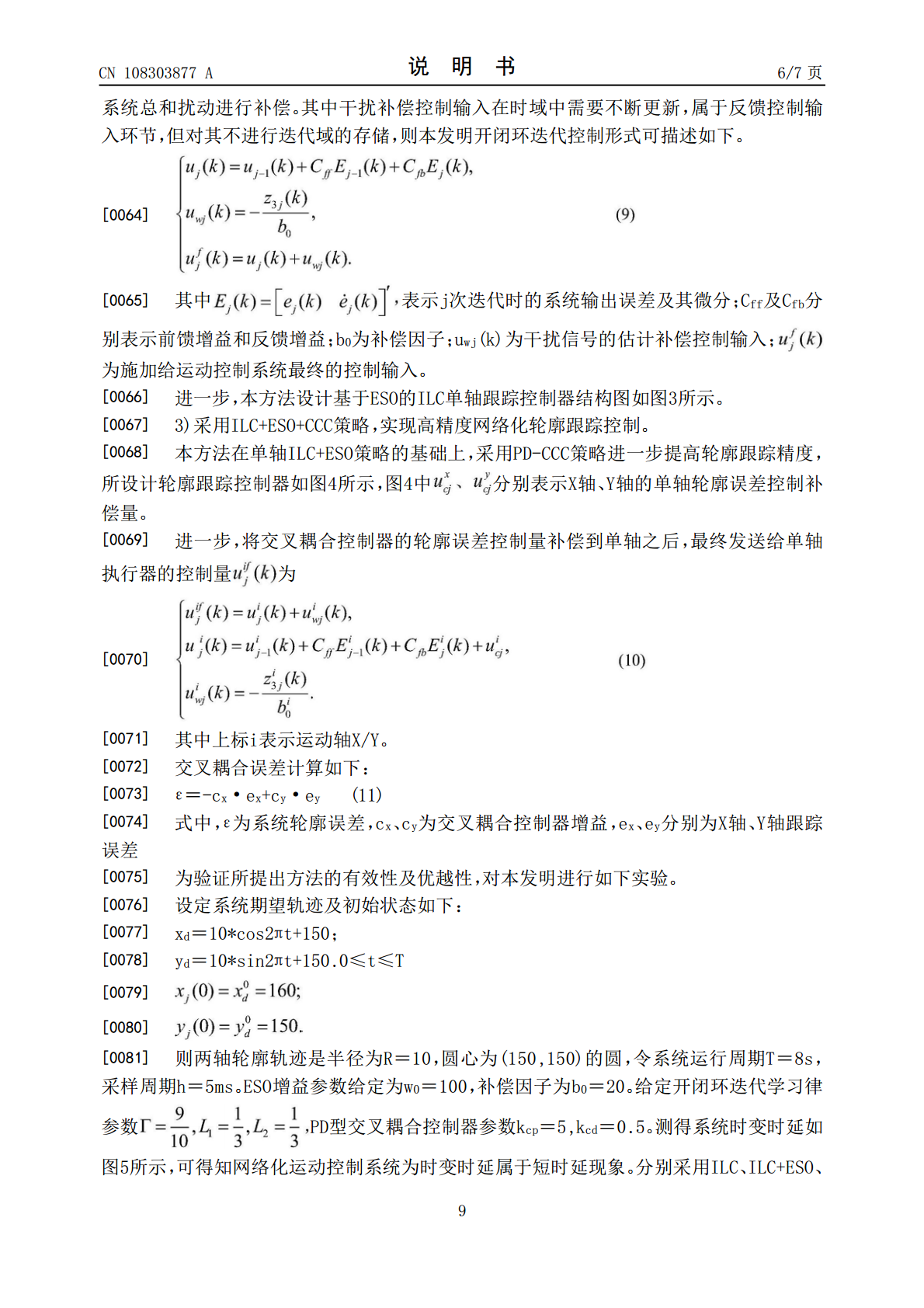
一种基于ESO的网络化运动控制系统迭代学习高精度轮廓跟踪控制方法,包括以下步骤:1)建立扩张的三阶离散系统模型,利用状态扩张观测器(ESO)对系统干扰进行估计;2)2)针对网络化单轴跟踪控制,采用反馈辅助型开闭环迭代学习控制策略,并结合ESO消除非周期性干扰的影响,实现高精度网络化单轴跟踪控制;3)在单轴跟踪控制的基础上,针对轮廓误差控制,设计PD型交叉耦合控制器,采用ILC+ESO+CCC策略,实现高精度网络化轮廓跟踪控制。本发明在有效提高迭代收敛速度,实现网络化运动控制系统的高精度单轴轨迹跟踪控制和高

基于ADRC的网络化运动控制系统高精度轮廓跟踪控制.docx
基于ADRC的网络化运动控制系统高精度轮廓跟踪控制基于ADRC的网络化运动控制系统高精度轮廓跟踪控制摘要:近年来,随着信息技术的快速发展,网络化控制系统应用广泛。本文提出了一种基于自抗扰控制(ADRC)的网络化运动控制系统,用于实现高精度轮廓跟踪控制。通过将ADRC算法与网络化控制系统相结合,可以克服网络传输延迟和不确定性等问题,提高控制系统的性能。在实验中,将该算法应用于轮廓跟踪控制,通过与传统控制方法进行比较,验证了该方法的有效性和优越性。关键词:ADRC,网络化控制系统,轮廓跟踪,高精度控制1.引言

基于ADRC的网络化运动控制系统高精度轮廓跟踪控制.docx
基于ADRC的网络化运动控制系统高精度轮廓跟踪控制基于ADRC的网络化运动控制系统高精度轮廓跟踪控制摘要:随着机器人和自动化技术的快速发展,高精度轮廓跟踪控制在许多应用中变得越来越重要。网络化运动控制系统是一种将传感器、执行器和控制算法通过网络连接的技术,可以实现分布式控制和协作控制。本文针对高精度轮廓跟踪控制问题,提出了一种基于自抗扰控制(ADRC)的网络化运动控制系统。该系统通过融合自抗扰控制算法和网络化运动控制技术,能够实现精确的轮廓跟踪控制。在仿真实验中,我们利用MATLAB/Simulink模拟
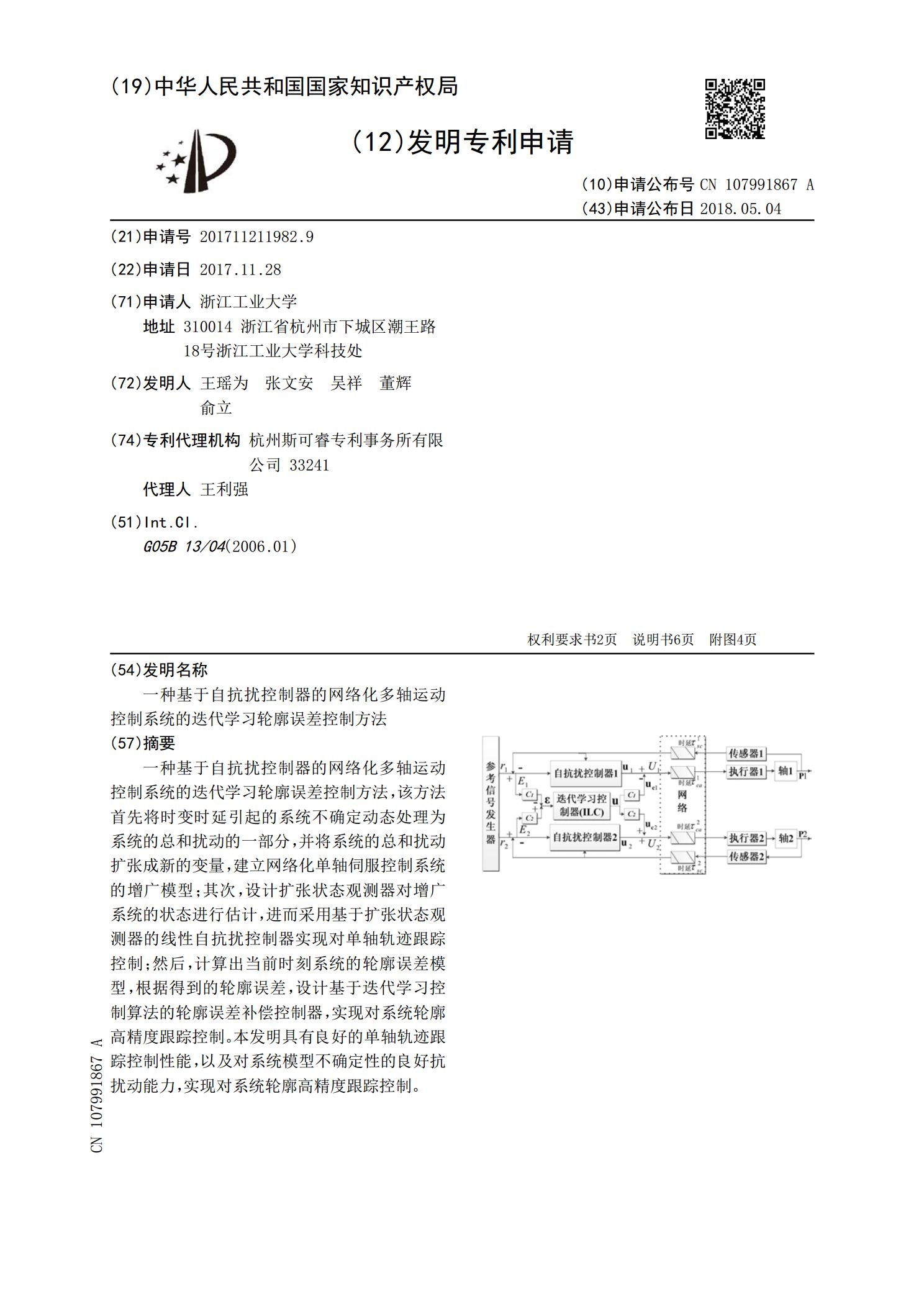
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法.pdf
一种基于自抗扰控制器的网络化多轴运动控制系统的迭代学习轮廓误差控制方法,该方法首先将时变时延引起的系统不确定动态处理为系统的总和扰动的一部分,并将系统的总和扰动扩张成新的变量,建立网络化单轴伺服控制系统的增广模型;其次,设计扩张状态观测器对增广系统的状态进行估计,进而采用基于扩张状态观测器的线性自抗扰控制器实现对单轴轨迹跟踪控制;然后,计算出当前时刻系统的轮廓误差模型,根据得到的轮廓误差,设计基于迭代学习控制算法的轮廓误差补偿控制器,实现对系统轮廓高精度跟踪控制。本发明具有良好的单轴轨迹跟踪控制性能,以及

基于迭代学习控制的划片机高精度运动误差补偿.docx
基于迭代学习控制的划片机高精度运动误差补偿基于迭代学习控制的划片机高精度运动误差补偿摘要:随着制造业的快速发展,对高精度加工的需求也越来越迫切。划片机作为一种常用于微小物件的切割加工设备,其精度要求尤为高。然而,在实际应用中,受到机械结构和环境因素的影响,划片机的运动误差往往难以避免。为了解决这一问题,本文提出了一种基于迭代学习控制的方法,通过对误差进行实时检测和补偿,实现了划片机的高精度运动。1.引言划片机作为一种常见的微小物件切割加工设备,广泛应用于电子、光学、医疗等领域。然而,由于受到机械结构刚度、