
与多轮车辆转向操控机构矢量联动的电子调控差速机构.pdf

书生****12

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
与多轮车辆转向操控机构矢量联动的电子调控差速机构.pdf
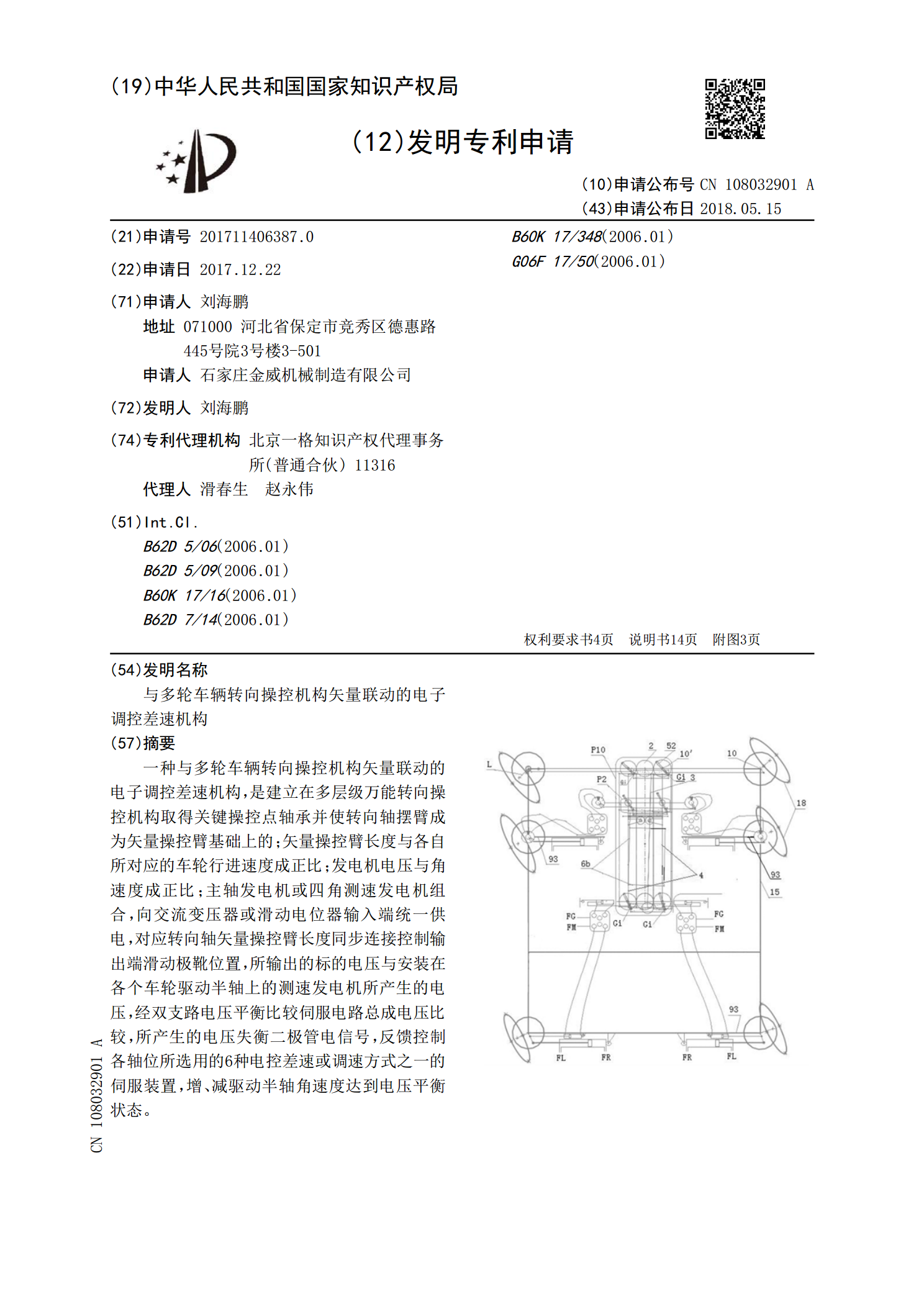
一种与多轮车辆转向操控机构矢量联动的电子调控差速机构,是建立在多层级万能转向操控机构取得关键操控点轴承并使转向轴摆臂成为矢量操控臂基础上的;矢量操控臂长度与各自所对应的车轮行进速度成正比;发电机电压与角速度成正比;主轴发电机或四角测速发电机组合,向交流变压器或滑动电位器输入端统一供电,对应转向轴矢量操控臂长度同步连接控制输出端滑动极靴位置,所输出的标的电压与安装在各个车轮驱动半轴上的测速发电机所产生的电压,经双支路电压平衡比较伺服电路总成电压比较,所产生的电压失衡二极管电信号,反馈控制各轴位所选用的6种电
一种四轮差速转向机构及车辆.pdf
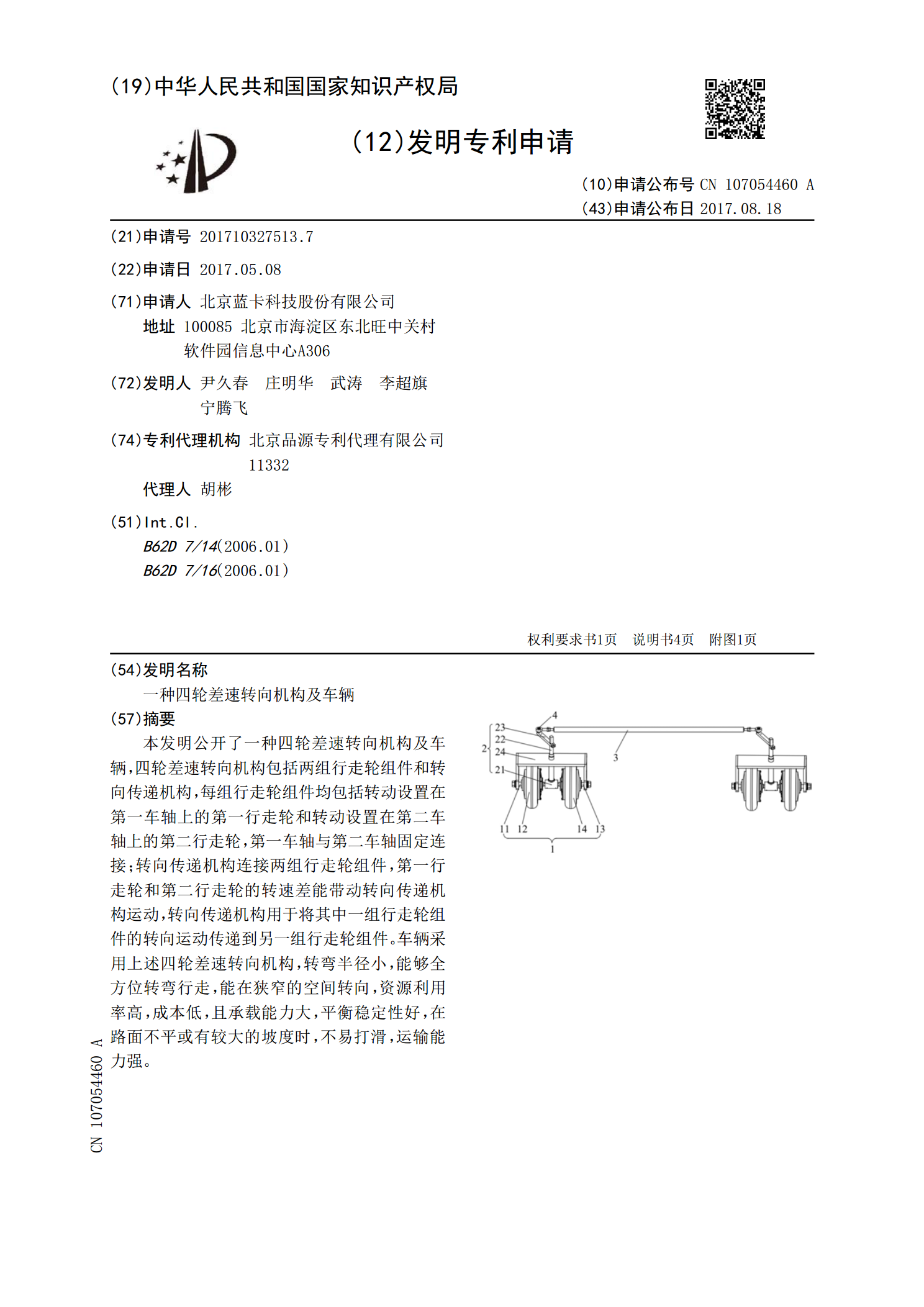
本发明公开了一种四轮差速转向机构及车辆,四轮差速转向机构包括两组行走轮组件和转向传递机构,每组行走轮组件均包括转动设置在第一车轴上的第一行走轮和转动设置在第二车轴上的第二行走轮,第一车轴与第二车轴固定连接;转向传递机构连接两组行走轮组件,第一行走轮和第二行走轮的转速差能带动转向传递机构运动,转向传递机构用于将其中一组行走轮组件的转向运动传递到另一组行走轮组件。车辆采用上述四轮差速转向机构,转弯半径小,能够全方位转弯行走,能在狭窄的空间转向,资源利用率高,成本低,且承载能力大,平衡稳定性好,在路面不平或有较
一种三轮差速转向机构及车辆.pdf
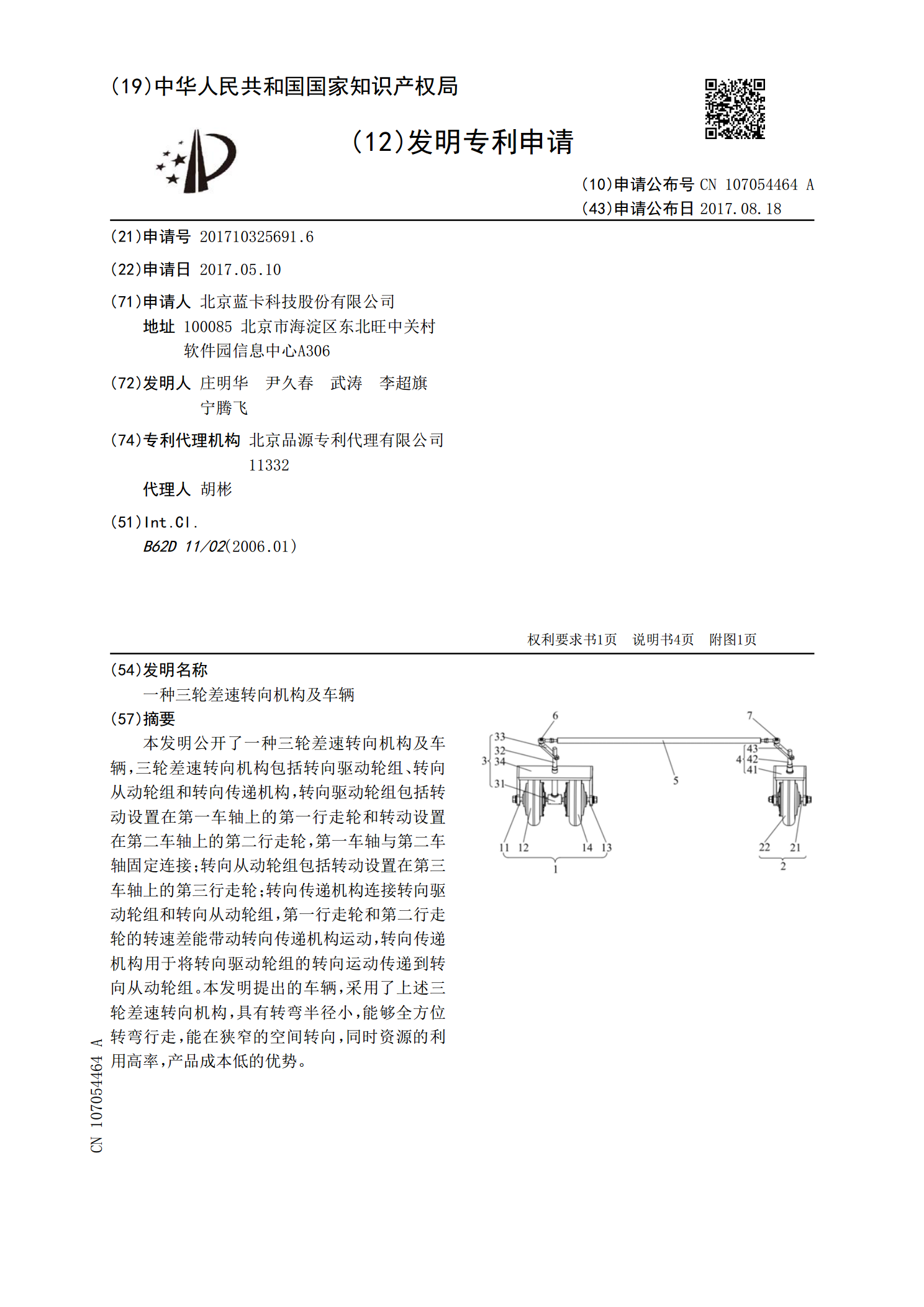
本发明公开了一种三轮差速转向机构及车辆,三轮差速转向机构包括转向驱动轮组、转向从动轮组和转向传递机构,转向驱动轮组包括转动设置在第一车轴上的第一行走轮和转动设置在第二车轴上的第二行走轮,第一车轴与第二车轴固定连接;转向从动轮组包括转动设置在第三车轴上的第三行走轮;转向传递机构连接转向驱动轮组和转向从动轮组,第一行走轮和第二行走轮的转速差能带动转向传递机构运动,转向传递机构用于将转向驱动轮组的转向运动传递到转向从动轮组。本发明提出的车辆,采用了上述三轮差速转向机构,具有转弯半径小,能够全方位转弯行走,能在狭

四轮电动车差速转向驱动机构.pdf
本发明公开了一种四轮电动车差速转向驱动机构,包括前轮驱动桥、后轮驱动桥和电控装置;所述前轮驱动桥包括前轮轴和通过羊角转向节安装在前轮轴两侧的两个电机,每个电机分别连接并驱动一前轮;而所述后轮驱动桥包括后轮轴和安装在后轮轴上的两个电机,而每个电机分别连接并驱动一后轮,所述电控装置与上述四个电机相连。本发明通过电控装置控制前轮轴上的两个电机驱动两个前轮差速运转来实现转向,同现有的机械转向机构相比,其转向过程无需传递机械力矩,更加省力,也更加灵活方便,且相比现有技术,本发明由于取消了前桥转向机构和后
液压差速机构及车辆.pdf
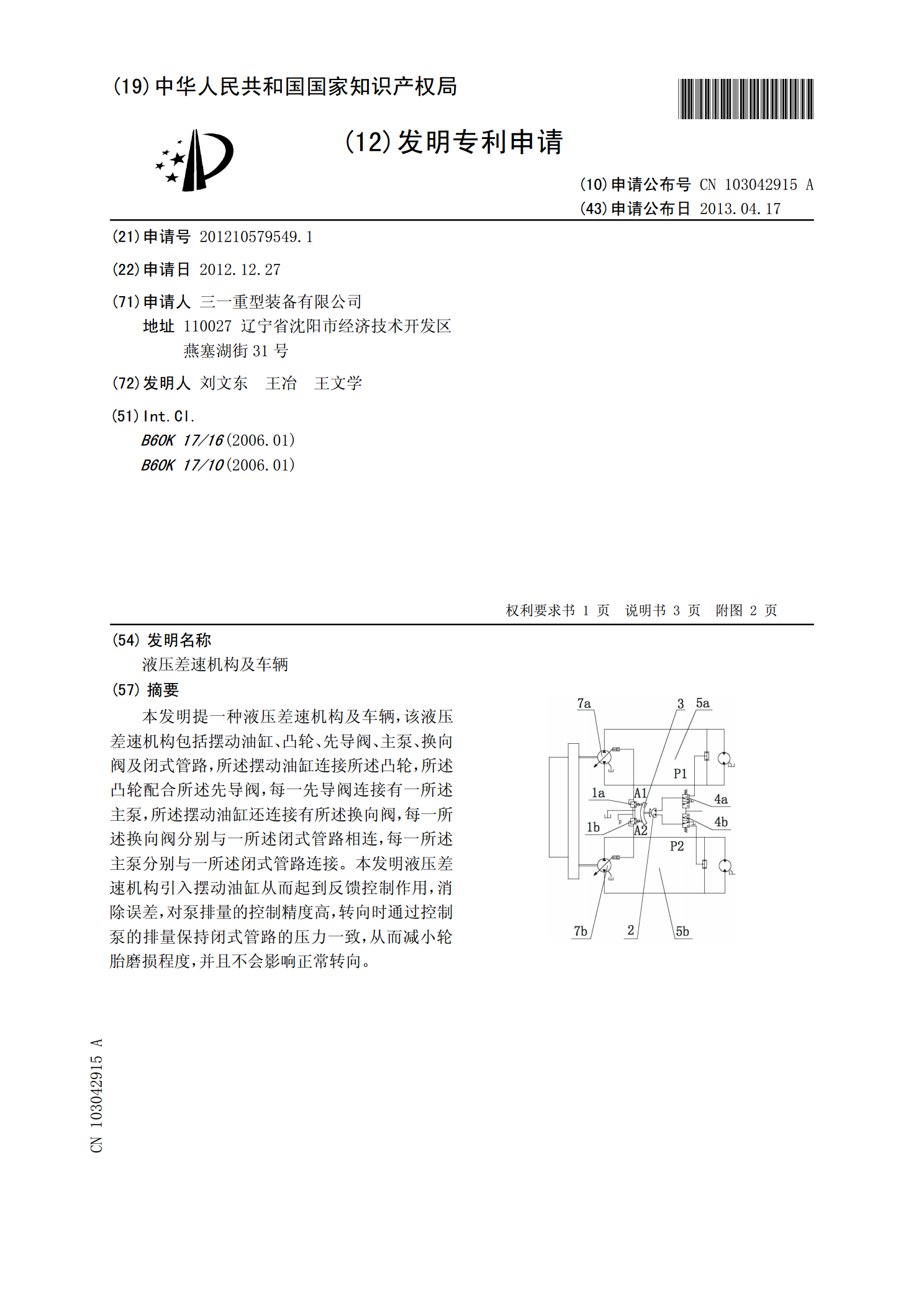
本发明提一种液压差速机构及车辆,该液压差速机构包括摆动油缸、凸轮、先导阀、主泵、换向阀及闭式管路,所述摆动油缸连接所述凸轮,所述凸轮配合所述先导阀,每一先导阀连接有一所述主泵,所述摆动油缸还连接有所述换向阀,每一所述换向阀分别与一所述闭式管路相连,每一所述主泵分别与一所述闭式管路连接。本发明液压差速机构引入摆动油缸从而起到反馈控制作用,消除误差,对泵排量的控制精度高,转向时通过控制泵的排量保持闭式管路的压力一致,从而减小轮胎磨损程度,并且不会影响正常转向。