
一种用于车间内搬运货物的智能机器人.pdf

一条****彩妍

1/6
2/6
3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于车间内搬运货物的智能机器人.pdf
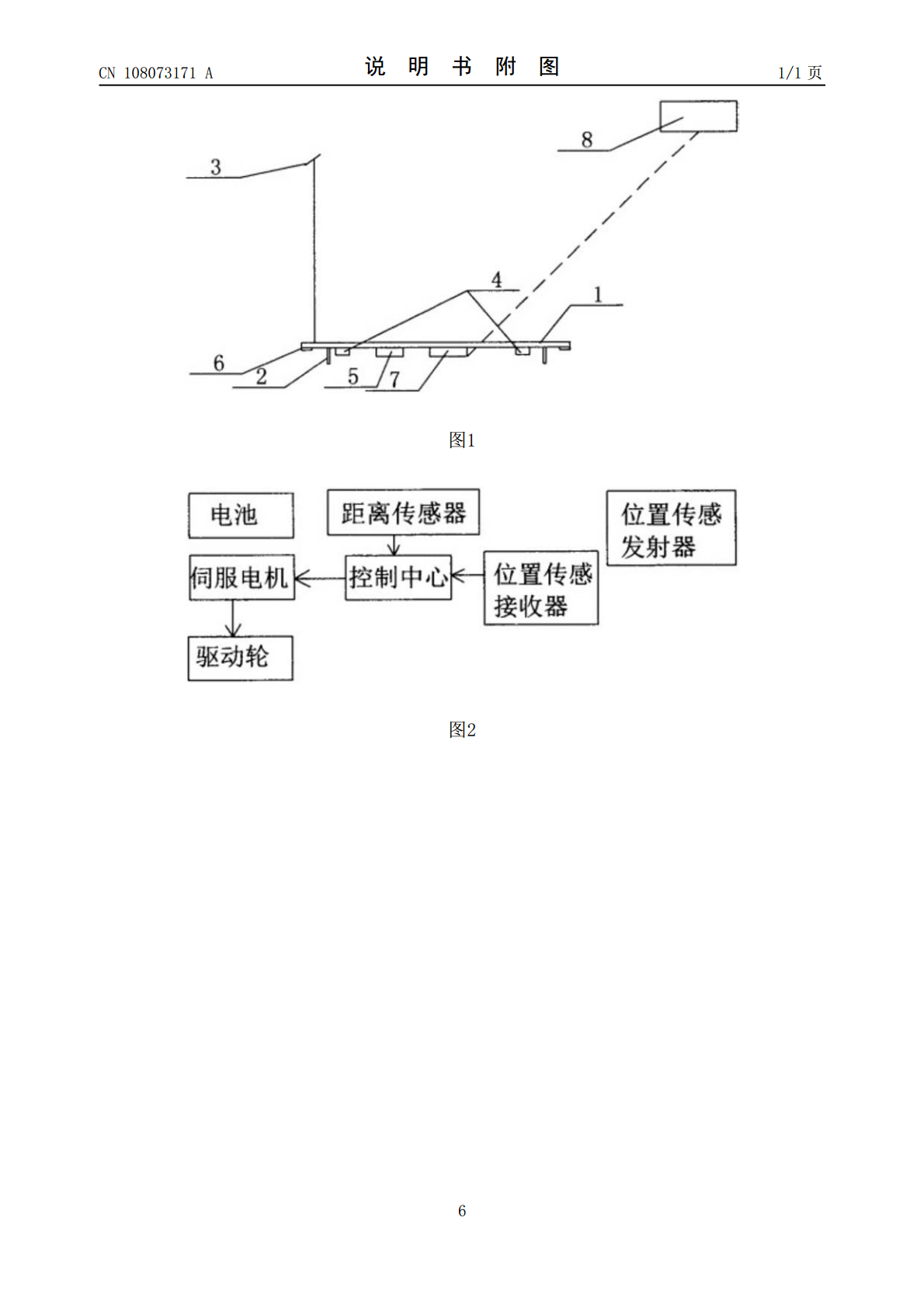
本发明提供一种用于车间内搬运货物的智能机器人,本发明涉及智能机械技术领域,车体由平台、扶手和驱动轮构成;平台的一侧设有扶手,平台的底部设有数个驱动轮,平台的底部分别设有控制中心和电池,且平台的底部还设有数个伺服电机;所述的平台的四角及四边的中心处均设有距离传感器;所述的位置传感器设置在车间内;所述的距离传感器和位置传感器均与控制中心连接;所述的控制中心与伺服电机连接;所述的伺服电机与驱动轮连接。能够根据操作人员发出的指令自动将货物搬运到目标位置,且安全可靠,无需人工参与。
一种用于狭窄空间内货物搬运的叉车.pdf
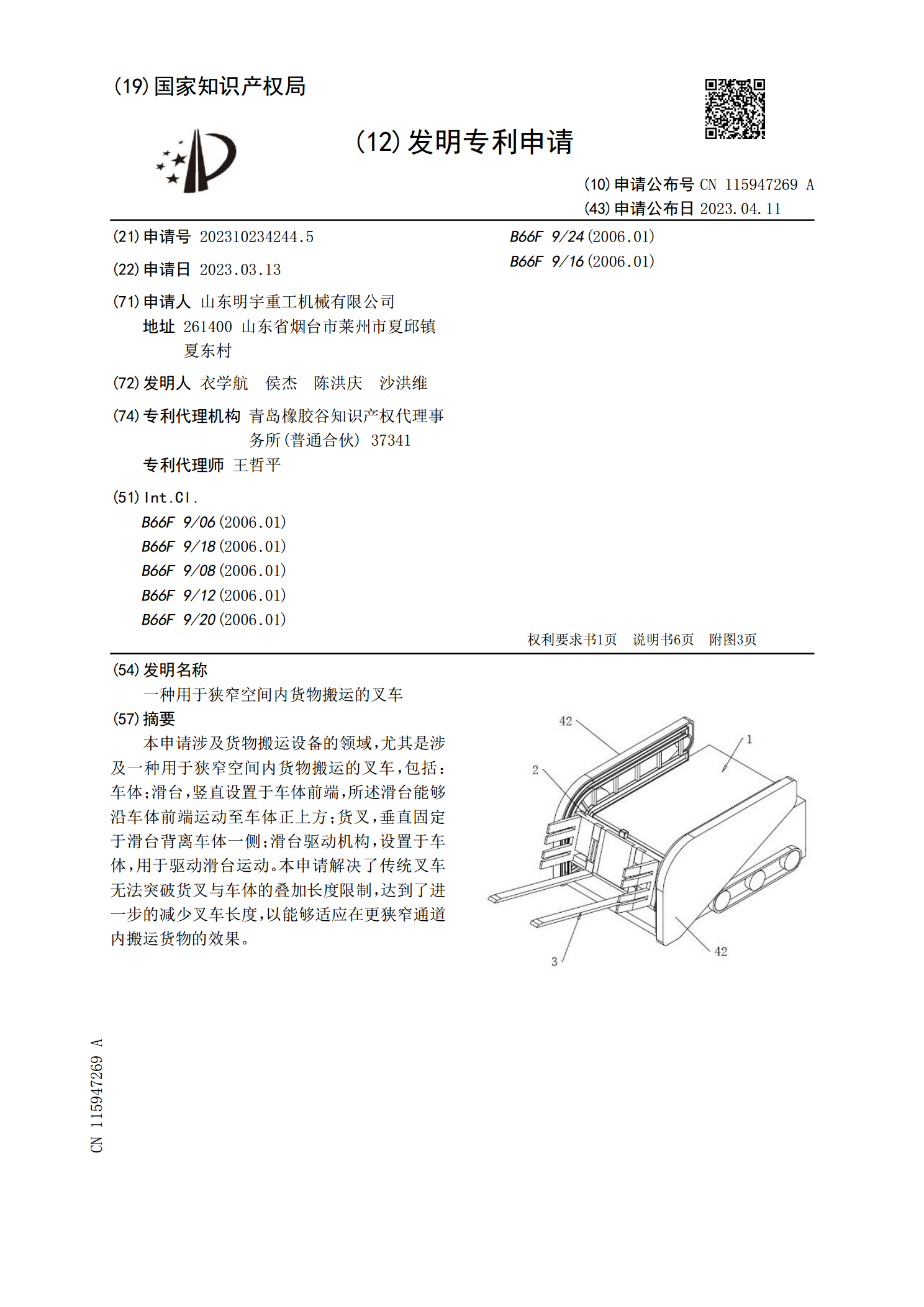
本申请涉及货物搬运设备的领域,尤其是涉及一种用于狭窄空间内货物搬运的叉车,包括:车体;滑台,竖直设置于车体前端,所述滑台能够沿车体前端运动至车体正上方;货叉,垂直固定于滑台背离车体一侧;滑台驱动机构,设置于车体,用于驱动滑台运动。本申请解决了传统叉车无法突破货叉与车体的叠加长度限制,达到了进一步的减少叉车长度,以能够适应在更狭窄通道内搬运货物的效果。

一种用于货物装卸及搬运的智能运输车.pdf
本发明公开了一种用于货物装卸及搬运的智能运输车,包括驱动装置、顶升装置、物料承载装置及控制装置,驱动装置包括由电机A驱动的车架,顶升装置包括电机B、丝杠、滑杆I、滑块I、滑杆Ⅱ、滑块Ⅱ、至少两个呈“X”型的可折叠支撑架,物料承载装置包括货箱及由电机C驱动的开合机构,控制装置包括超声波传感器、灰度传感器和集成电路控制器,物料承载装置底部与支撑架连接,支撑架底部与车架上的滑动机构连接,控制装置控制运输车行走。本发明的智能运输车集自动循迹、运载、卸货于一体,节约劳动力和时间,降低搬运工人劳动强度,大大提高货物运

一种智能货物搬运机器人.pdf
本发明属于货物搬运机器人领域,尤其涉及一种智能货物搬运机器人,它包括底座、驱动轮、铲板和动力模块等,其中具有移动装置的楔形底座被对称安装于其底部的两个驱动轮驱动,驱动轮内部具有与控制系统连接的移动转向结构;相对于传统的全自动机器人通过对放置货物的货架的整体搬运,本发明可以达到对散落不同地点的货物的精准操作;相对于传统全自动机器人通过机器臂对散落不同地点的货物的操作,本发明在满足搬运散落货物需求的同时,其结构简单且制造成本较低。相对于传统的半自动机器人依靠人工实现货物装载,本发明可以实现机器人的装载,本发明
一种车间内智能物料搬运装备.pdf
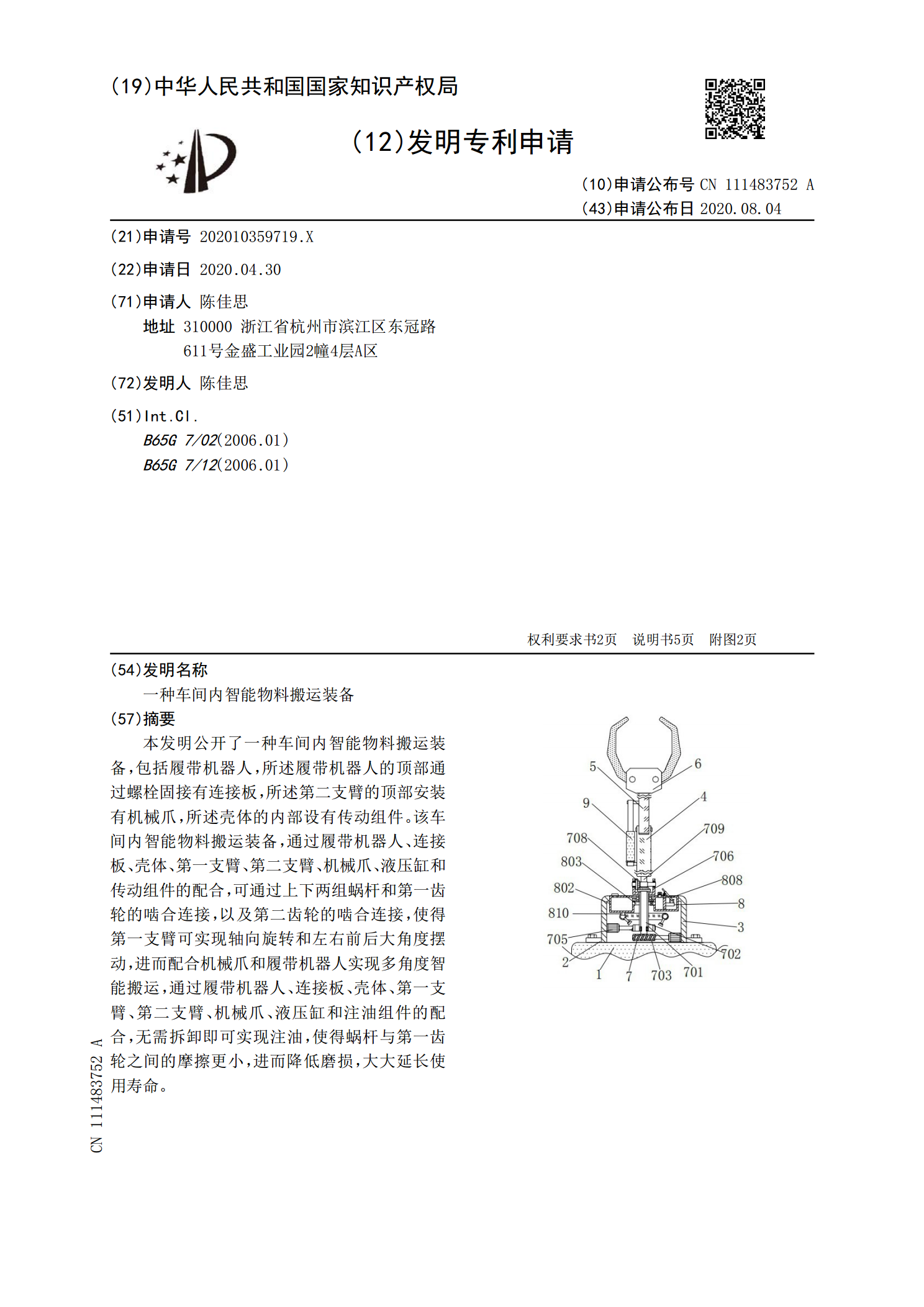
本发明公开了一种车间内智能物料搬运装备,包括履带机器人,所述履带机器人的顶部通过螺栓固接有连接板,所述第二支臂的顶部安装有机械爪,所述壳体的内部设有传动组件。该车间内智能物料搬运装备,通过履带机器人、连接板、壳体、第一支臂、第二支臂、机械爪、液压缸和传动组件的配合,可通过上下两组蜗杆和第一齿轮的啮合连接,以及第二齿轮的啮合连接,使得第一支臂可实现轴向旋转和左右前后大角度摆动,进而配合机械爪和履带机器人实现多角度智能搬运,通过履带机器人、连接板、壳体、第一支臂、第二支臂、机械爪、液压缸和注油组件的配合,无需