
一种用于货物装卸及搬运的智能运输车.pdf

邻家****66


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于货物装卸及搬运的智能运输车.pdf
本发明公开了一种用于货物装卸及搬运的智能运输车,包括驱动装置、顶升装置、物料承载装置及控制装置,驱动装置包括由电机A驱动的车架,顶升装置包括电机B、丝杠、滑杆I、滑块I、滑杆Ⅱ、滑块Ⅱ、至少两个呈“X”型的可折叠支撑架,物料承载装置包括货箱及由电机C驱动的开合机构,控制装置包括超声波传感器、灰度传感器和集成电路控制器,物料承载装置底部与支撑架连接,支撑架底部与车架上的滑动机构连接,控制装置控制运输车行走。本发明的智能运输车集自动循迹、运载、卸货于一体,节约劳动力和时间,降低搬运工人劳动强度,大大提高货物运
一种智能装卸和搬运货物的物流车.pdf
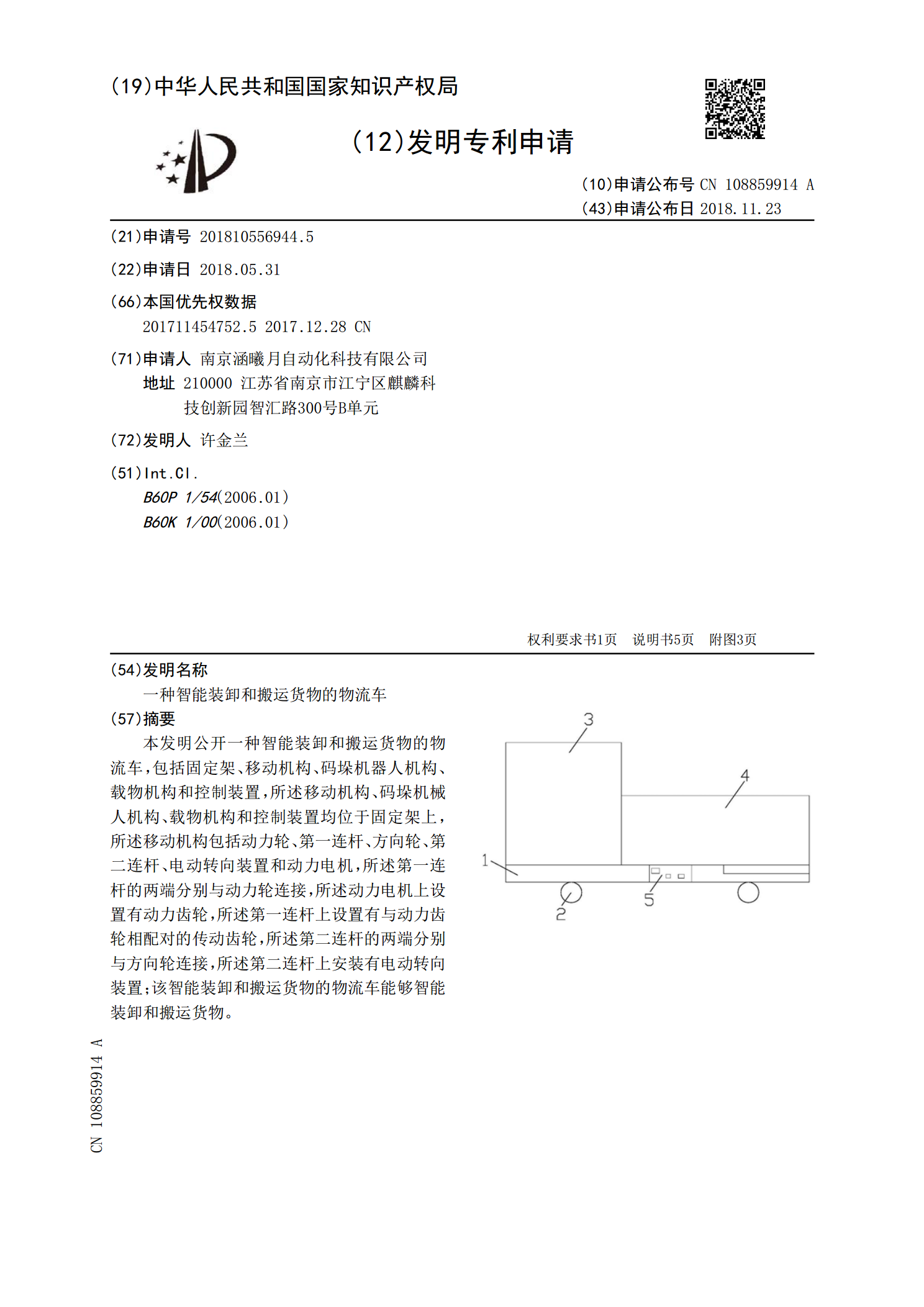
本发明公开一种智能装卸和搬运货物的物流车,包括固定架、移动机构、码垛机器人机构、载物机构和控制装置,所述移动机构、码垛机械人机构、载物机构和控制装置均位于固定架上,所述移动机构包括动力轮、第一连杆、方向轮、第二连杆、电动转向装置和动力电机,所述第一连杆的两端分别与动力轮连接,所述动力电机上设置有动力齿轮,所述第一连杆上设置有与动力齿轮相配对的传动齿轮,所述第二连杆的两端分别与方向轮连接,所述第二连杆上安装有电动转向装置;该智能装卸和搬运货物的物流车能够智能装卸和搬运货物。

一种用于装卸、存取车辆的智能搬运车.pdf
本发明公开了一种用于装卸、存取车辆的智能搬运车,至少包括车架、前轮支撑组、后轮支撑组、拨推单元、行走轮组、探测器和控制器;所述前轮支撑组和所述后轮支撑组分别设置在所述车架的两侧外侧边上;所述行走轮组带动所述搬运车运动;所述拨推单元设置在所述车架上,包括纵向驱动组件和横向拨杆伸缩组件;所述纵向驱动组件驱动所述横向拨杆伸缩组件移动到所述轮胎前方后,伸出横向拨杆在轮胎前部施加挤压力,使轮胎在横向拨杆与所述前轮支撑组或所述后轮支撑组的挤压下移至所述前轮支撑组或所述后轮支撑组上;所述探测器将信号传输至控制器;所述控

货物装卸搬运合同.doc
货物装卸搬运合同甲方:乙方:根据《中华人民共和国合同法》的相关规定,经甲乙双方友好协商,本着平等互利的原则,现就甲方存放在天津港物流发展有限公司的货物和集装箱的装卸、拆箱、掏换箱等工作交由乙方办理的相关事项,达成以下协议:服务要求:乙方接到甲方装卸通知后,应在30分钟内到达现场,等待甲方装卸工作的安排,其作业过程由甲方现场负责人全权监控。乙方作业工人必须全力配合甲方现场负责人,作好相关工作,听从装卸过程中的安排,不得违规操作。对于不按现场负责人要求作业而造成的货物变形、损坏等,一律由乙方负责赔偿。所有的集

货物装卸搬运合同.doc
.精选合同范本货物装卸搬运合同甲方:乙方:根据《中华人民共和国合同法》的相关规定,经甲乙双方友好协商,本着平等互利的原则,现就甲方存放在天津港物流发展有限公司的货物和集装箱的装卸、拆箱、掏换箱等工作交由乙方办理的相关事项,达成以下协议:服务要求:乙方接到甲方装卸通知后,应在30分钟内到达现场,等待甲方装卸工作的安排,其作业过程由甲方现场负责人全权监控。乙方作业工人必须全力配合甲方现场负责人,作好相关工作,听从装卸过程中的安排,不得违规操作。对于不按现场负责人要求作业而造成的货物变形、损坏等,一律由乙方负责