
全向电动导向轮和具有该全向电动导向轮的机器人、车辆.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
全向电动导向轮和具有该全向电动导向轮的机器人、车辆.pdf
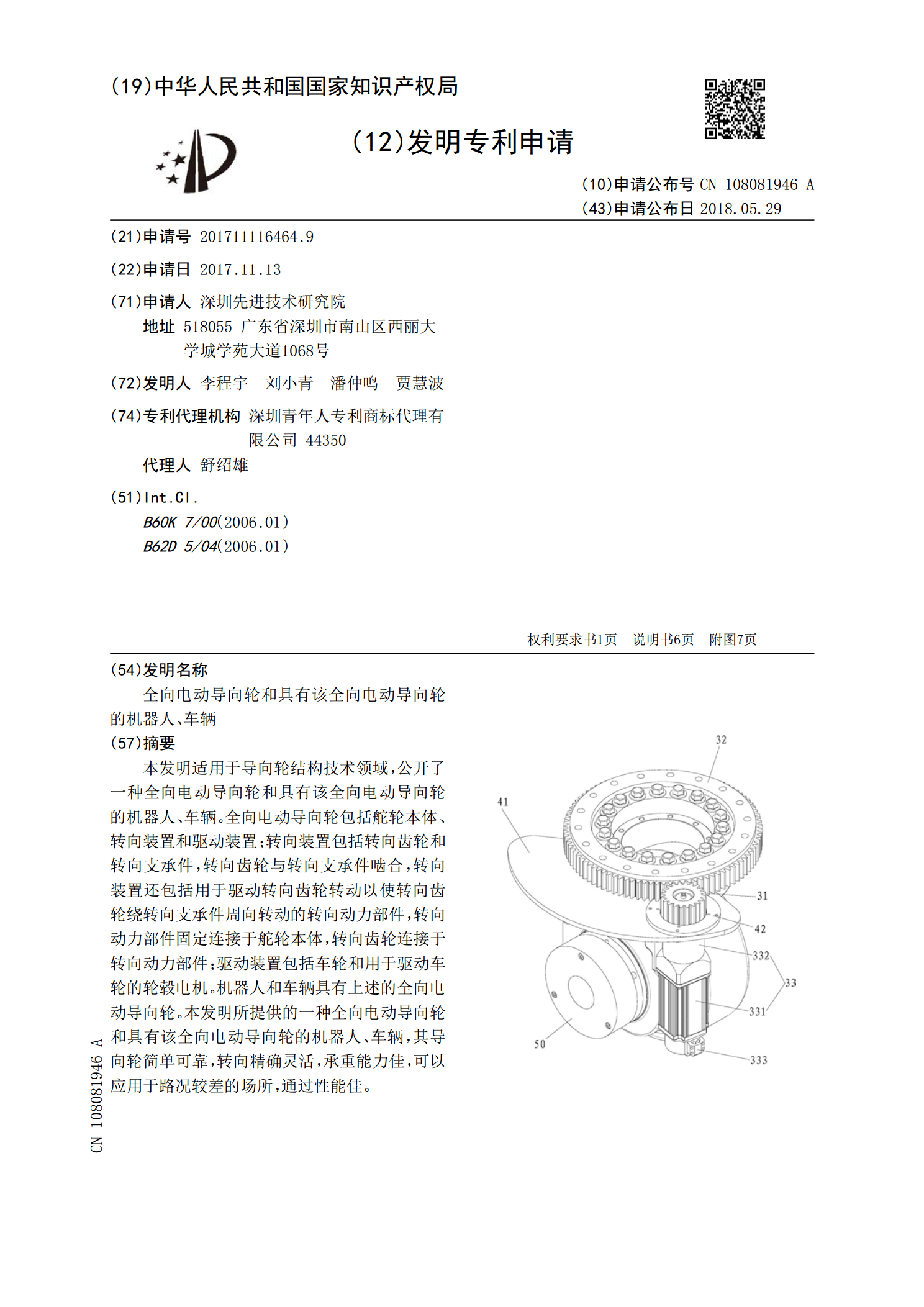
本发明适用于导向轮结构技术领域,公开了一种全向电动导向轮和具有该全向电动导向轮的机器人、车辆。全向电动导向轮包括舵轮本体、转向装置和驱动装置;转向装置包括转向齿轮和转向支承件,转向齿轮与转向支承件啮合,转向装置还包括用于驱动转向齿轮转动以使转向齿轮绕转向支承件周向转动的转向动力部件,转向动力部件固定连接于舵轮本体,转向齿轮连接于转向动力部件;驱动装置包括车轮和用于驱动车轮的轮毂电机。机器人和车辆具有上述的全向电动导向轮。本发明所提供的一种全向电动导向轮和具有该全向电动导向轮的机器人、车辆,其导向轮简单可靠
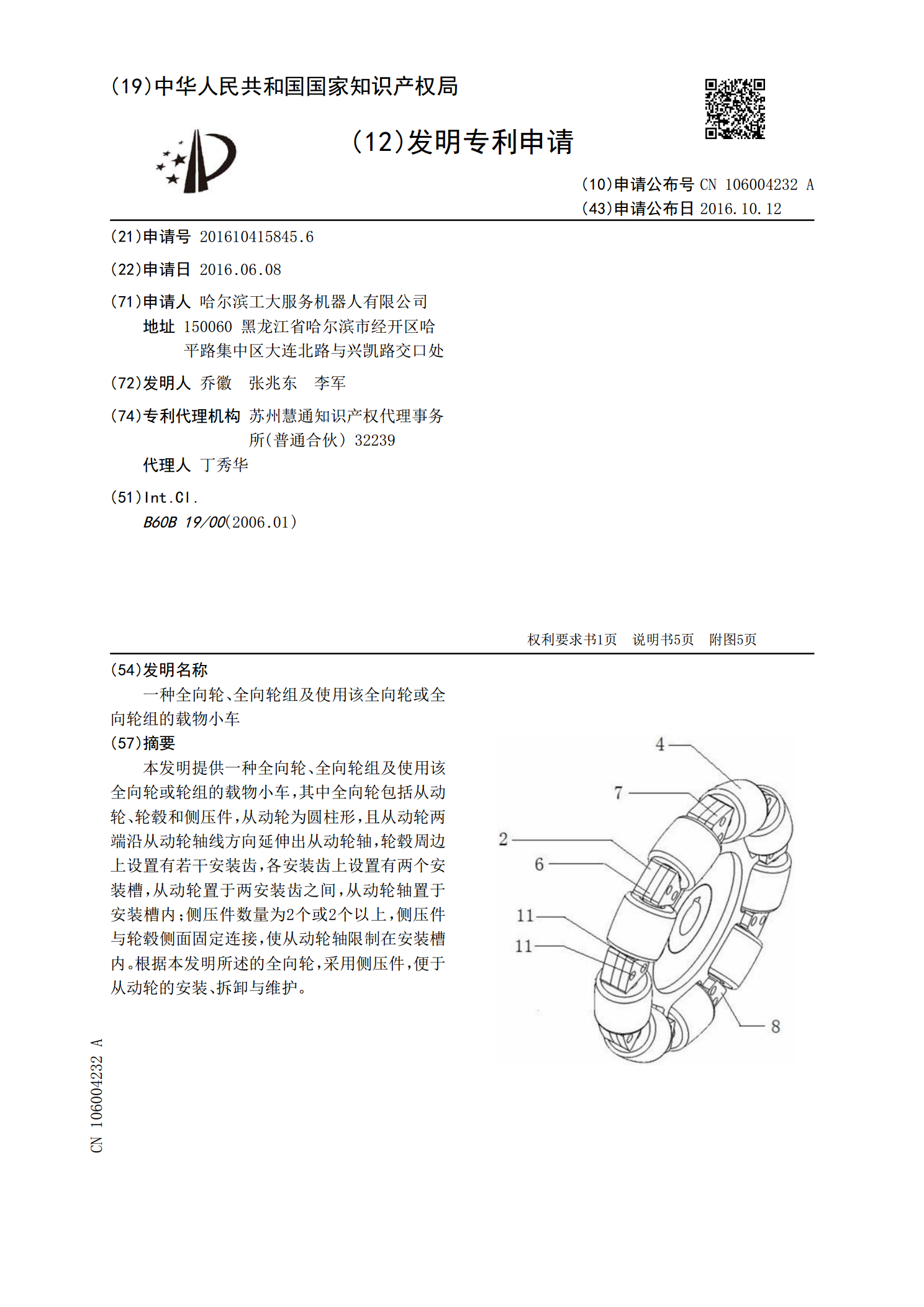
一种全向轮、全向轮组及使用该全向轮或全向轮组的载物小车.pdf
本发明提供一种全向轮、全向轮组及使用该全向轮或轮组的载物小车,其中全向轮包括从动轮、轮毂和侧压件,从动轮为圆柱形,且从动轮两端沿从动轮轴线方向延伸出从动轮轴,轮毂周边上设置有若干安装齿,各安装齿上设置有两个安装槽,从动轮置于两安装齿之间,从动轮轴置于安装槽内;侧压件数量为2个或2个以上,侧压件与轮毂侧面固定连接,使从动轮轴限制在安装槽内。根据本发明所述的全向轮,采用侧压件,便于从动轮的安装、拆卸与维护。
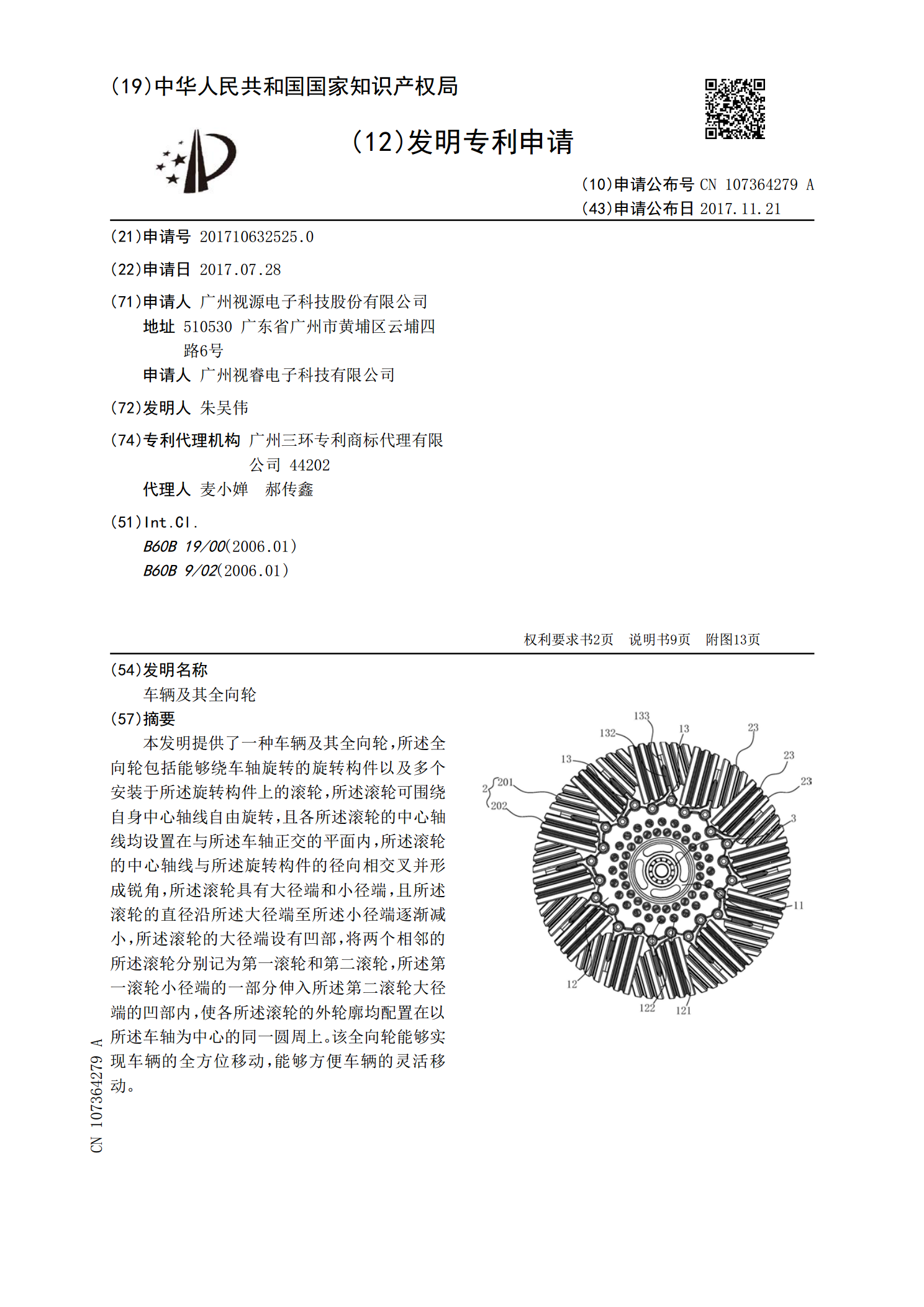
车辆及其全向轮.pdf
本发明提供了一种车辆及其全向轮,所述全向轮包括能够绕车轴旋转的旋转构件以及多个安装于所述旋转构件上的滚轮,所述滚轮可围绕自身中心轴线自由旋转,且各所述滚轮的中心轴线均设置在与所述车轴正交的平面内,所述滚轮的中心轴线与所述旋转构件的径向相交叉并形成锐角,所述滚轮具有大径端和小径端,且所述滚轮的直径沿所述大径端至所述小径端逐渐减小,所述滚轮的大径端设有凹部,将两个相邻的所述滚轮分别记为第一滚轮和第二滚轮,所述第一滚轮小径端的一部分伸入所述第二滚轮大径端的凹部内,使各所述滚轮的外轮廓均配置在以所述车轴为中心的同

全向电动轮椅.pdf
一种室内型电动轮椅。不同于现有整体式固定轴电动轮椅,全向电动轮椅采用分离式活动轴铰接传动构造,以转椅的底盘和升降轴为联接装置,把六足钢管椅和智能驱动的轮毂式电机联接起来,将电动轮的水平牵引力传递给底座上的六只万向脚轮,两只独立操控的电动轮能以升降轴为中心360度任意度原位转向,轮椅全方位移动时无须骨架转向,骨架转向时也无须移动整体轮椅,高度可调的椅座和六角型椅圈设计符合人体工程学原理,六方柱型框架结构稳定性和通过性一流,折叠尺寸小易于携带运输。简单的几何外形极富视觉美感蕴含人文内涵,是传统经典椅具与现代精
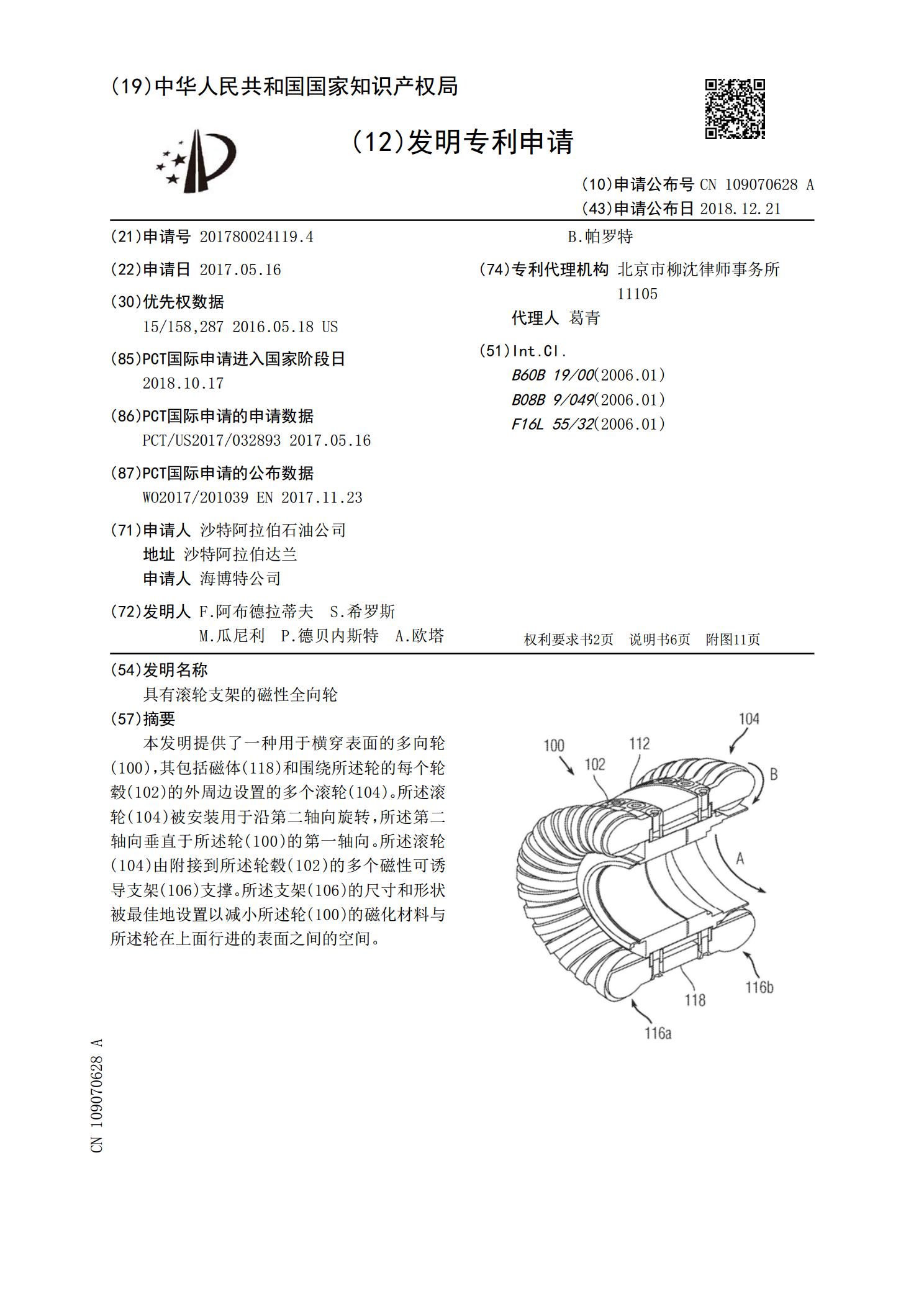
具有滚轮支架的磁性全向轮.pdf
本发明提供了一种用于横穿表面的多向轮(100),其包括磁体(118)和围绕所述轮的每个轮毂(102)的外周边设置的多个滚轮(104)。所述滚轮(104)被安装用于沿第二轴向旋转,所述第二轴向垂直于所述轮(100)的第一轴向。所述滚轮(104)由附接到所述轮毂(102)的多个磁性可诱导支架(106)支撑。所述支架(106)的尺寸和形状被最佳地设置以减小所述轮(100)的磁化材料与所述轮在上面行进的表面之间的空间。