
磁吸附式自适应壁面移动机器人.pdf

雨星****萌娃

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
磁吸附式自适应壁面移动机器人.pdf
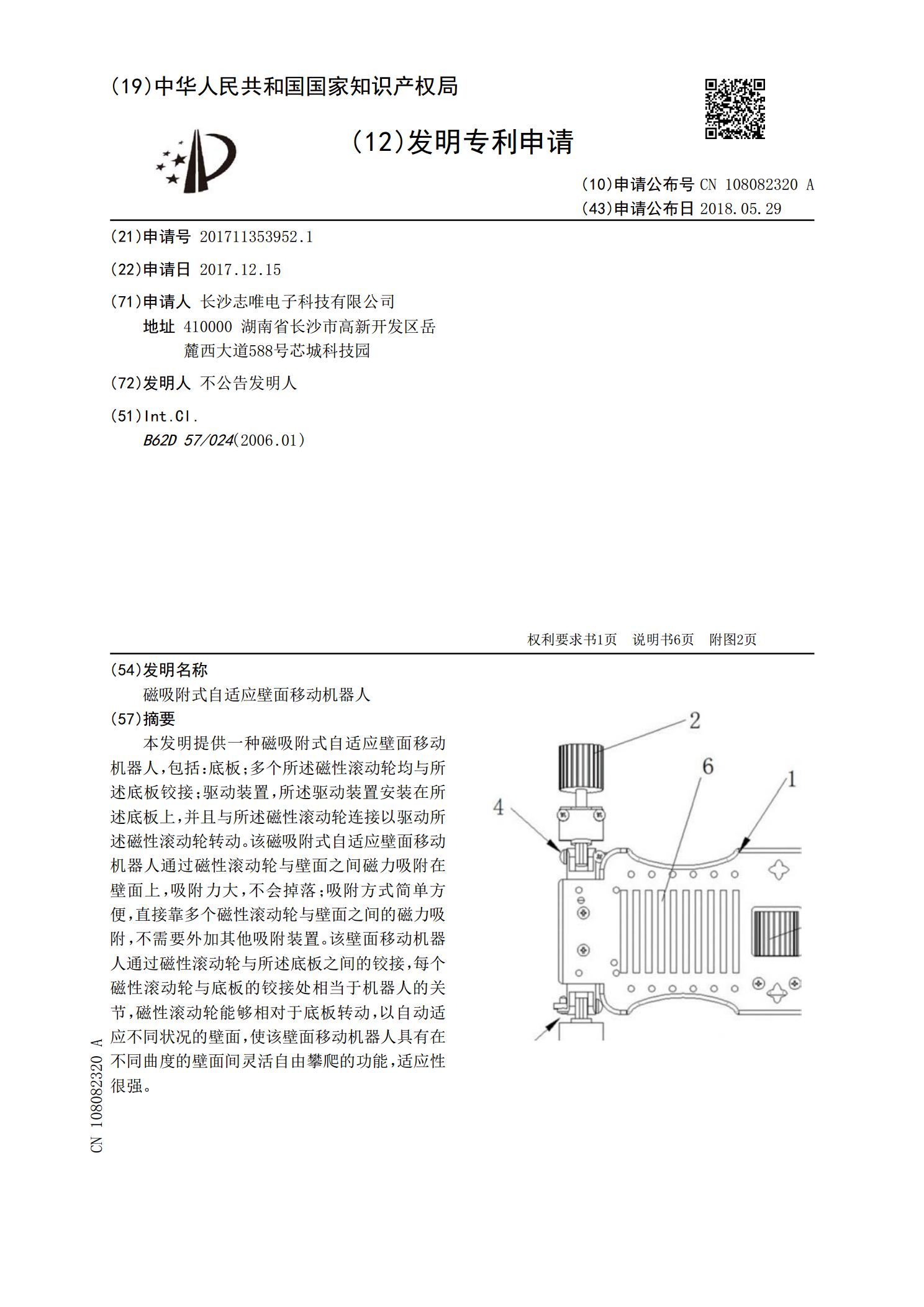
本发明提供一种磁吸附式自适应壁面移动机器人,包括:底板;多个所述磁性滚动轮均与所述底板铰接;驱动装置,所述驱动装置安装在所述底板上,并且与所述磁性滚动轮连接以驱动所述磁性滚动轮转动。该磁吸附式自适应壁面移动机器人通过磁性滚动轮与壁面之间磁力吸附在壁面上,吸附力大,不会掉落;吸附方式简单方便,直接靠多个磁性滚动轮与壁面之间的磁力吸附,不需要外加其他吸附装置。该壁面移动机器人通过磁性滚动轮与所述底板之间的铰接,每个磁性滚动轮与底板的铰接处相当于机器人的关节,磁性滚动轮能够相对于底板转动,以自动适应不同状况的壁
磁吸附式柔性自适应壁面移动机器人.pdf
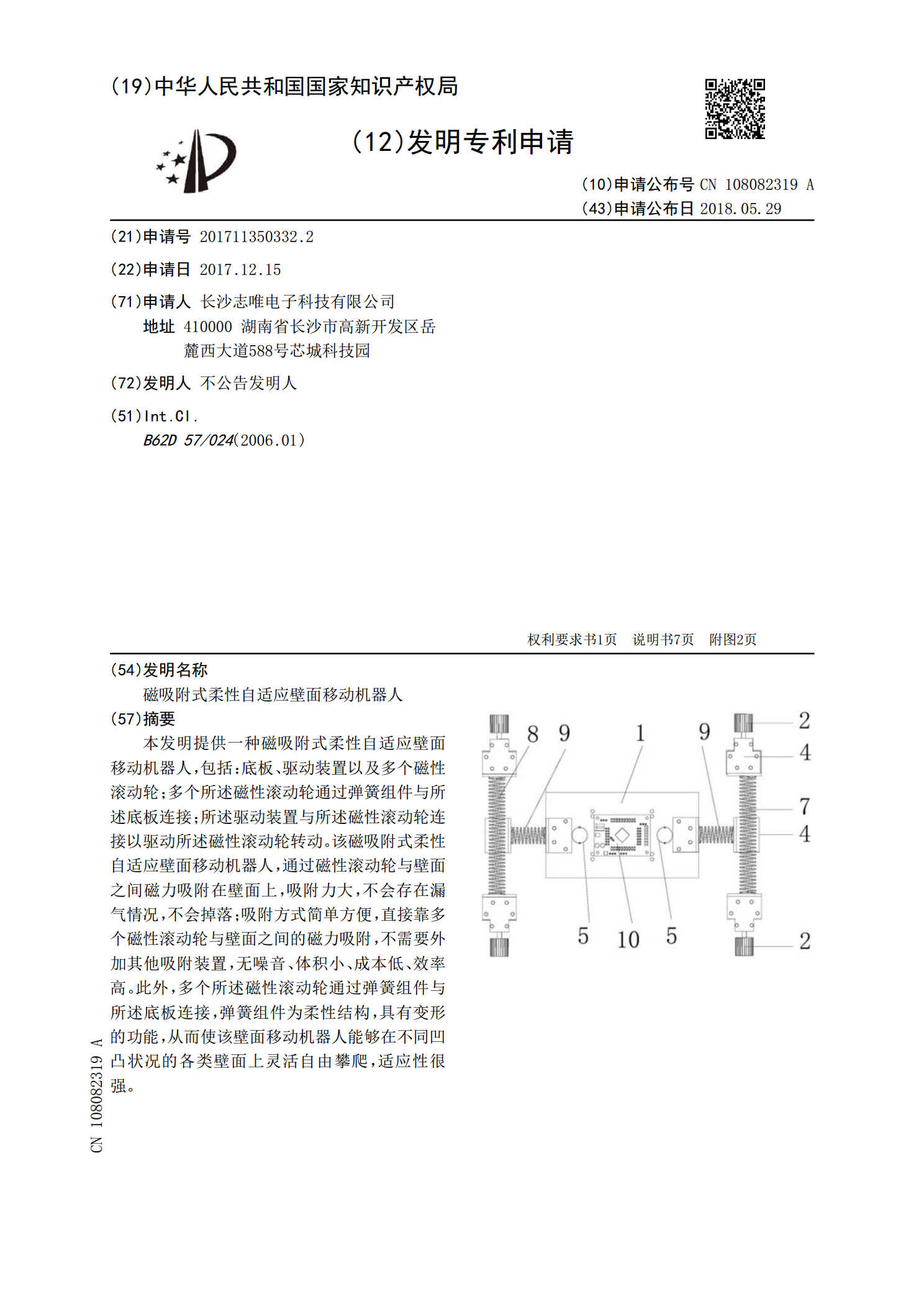
本发明提供一种磁吸附式柔性自适应壁面移动机器人,包括:底板、驱动装置以及多个磁性滚动轮;多个所述磁性滚动轮通过弹簧组件与所述底板连接;所述驱动装置与所述磁性滚动轮连接以驱动所述磁性滚动轮转动。该磁吸附式柔性自适应壁面移动机器人,通过磁性滚动轮与壁面之间磁力吸附在壁面上,吸附力大,不会存在漏气情况,不会掉落;吸附方式简单方便,直接靠多个磁性滚动轮与壁面之间的磁力吸附,不需要外加其他吸附装置,无噪音、体积小、成本低、效率高。此外,多个所述磁性滚动轮通过弹簧组件与所述底板连接,弹簧组件为柔性结构,具有变形的功能

多体磁吸附式自适应爬壁机器人.pdf
多体磁吸附式自适应爬壁机器人,属于特种机器人技术领域,包括主体装置、至少一个从体装置、至少一个机械臂和安装在每个从体装置上的作业工具;主体装置包括主体机架、移动机构和主体磁吸附装置;从体装置包括从体机架、从体磁吸附装置和至少一个辅助支撑轮;每个机械臂包括至少五个连杆、至少两个主动关节和至少两个被动关节。该装置实现了一种在空间全位置导磁壁面灵活移动和转向、空间曲面自适应,可进行焊接、气刨、切割、磨削、铣削、检测、清洗或喷涂作业的爬壁机器人,该机器人加工范围大、负载能力强、运动灵活性好、工作效率高。
磁吸附式爬壁轮.pdf
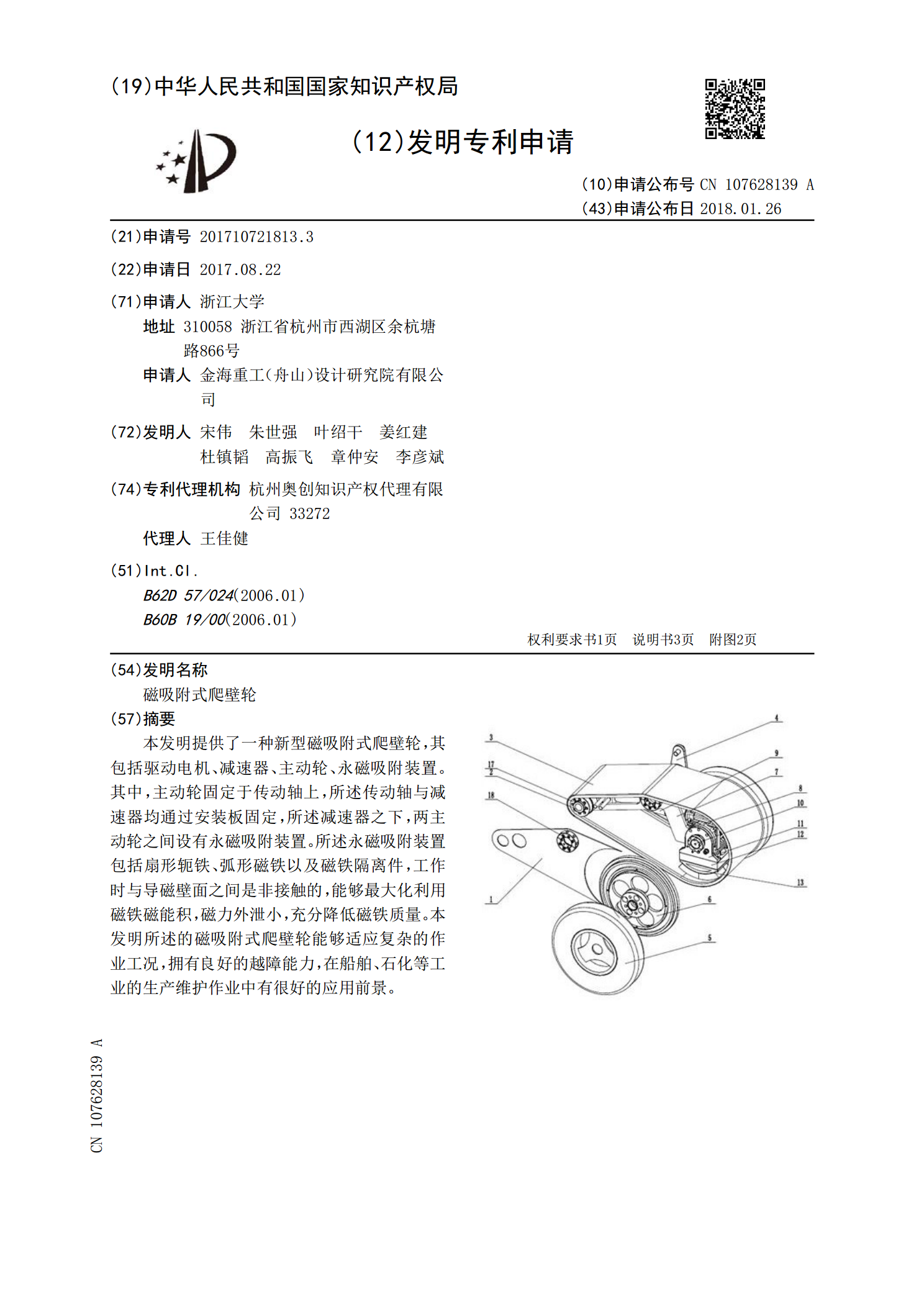
本发明提供了一种新型磁吸附式爬壁轮,其包括驱动电机、减速器、主动轮、永磁吸附装置。其中,主动轮固定于传动轴上,所述传动轴与减速器均通过安装板固定,所述减速器之下,两主动轮之间设有永磁吸附装置。所述永磁吸附装置包括扇形轭铁、弧形磁铁以及磁铁隔离件,工作时与导磁壁面之间是非接触的,能够最大化利用磁铁磁能积,磁力外泄小,充分降低磁铁质量。本发明所述的磁吸附式爬壁轮能够适应复杂的作业工况,拥有良好的越障能力,在船舶、石化等工业的生产维护作业中有很好的应用前景。
导磁壁面移动机构和导磁壁面移动机器人.pdf
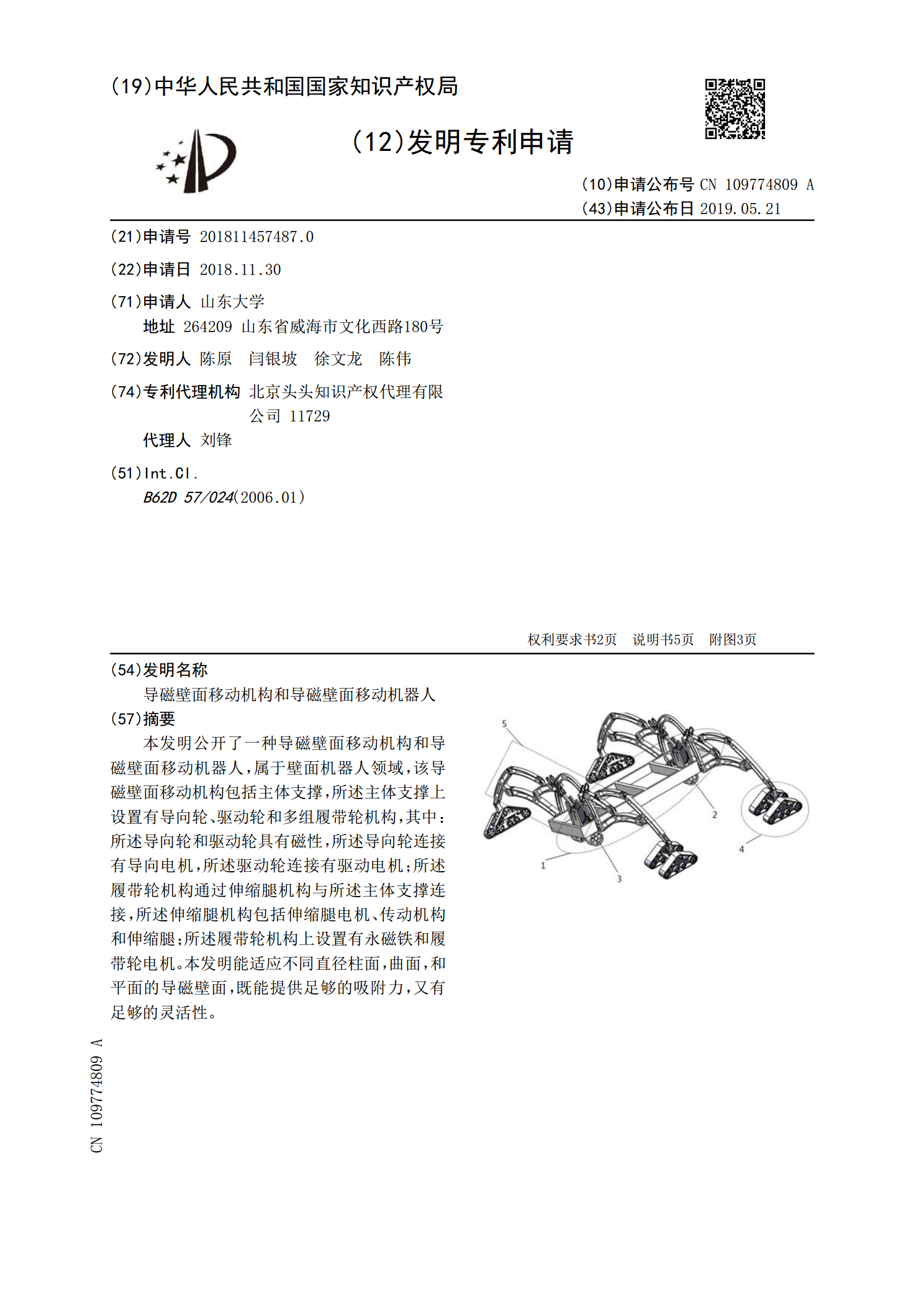
本发明公开了一种导磁壁面移动机构和导磁壁面移动机器人,属于壁面机器人领域,该导磁壁面移动机构包括主体支撑,所述主体支撑上设置有导向轮、驱动轮和多组履带轮机构,其中:所述导向轮和驱动轮具有磁性,所述导向轮连接有导向电机,所述驱动轮连接有驱动电机;所述履带轮机构通过伸缩腿机构与所述主体支撑连接,所述伸缩腿机构包括伸缩腿电机、传动机构和伸缩腿;所述履带轮机构上设置有永磁铁和履带轮电机。本发明能适应不同直径柱面,曲面,和平面的导磁壁面,既能提供足够的吸附力,又有足够的灵活性。