
导磁壁面移动机构和导磁壁面移动机器人.pdf

贤惠****66

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
导磁壁面移动机构和导磁壁面移动机器人.pdf
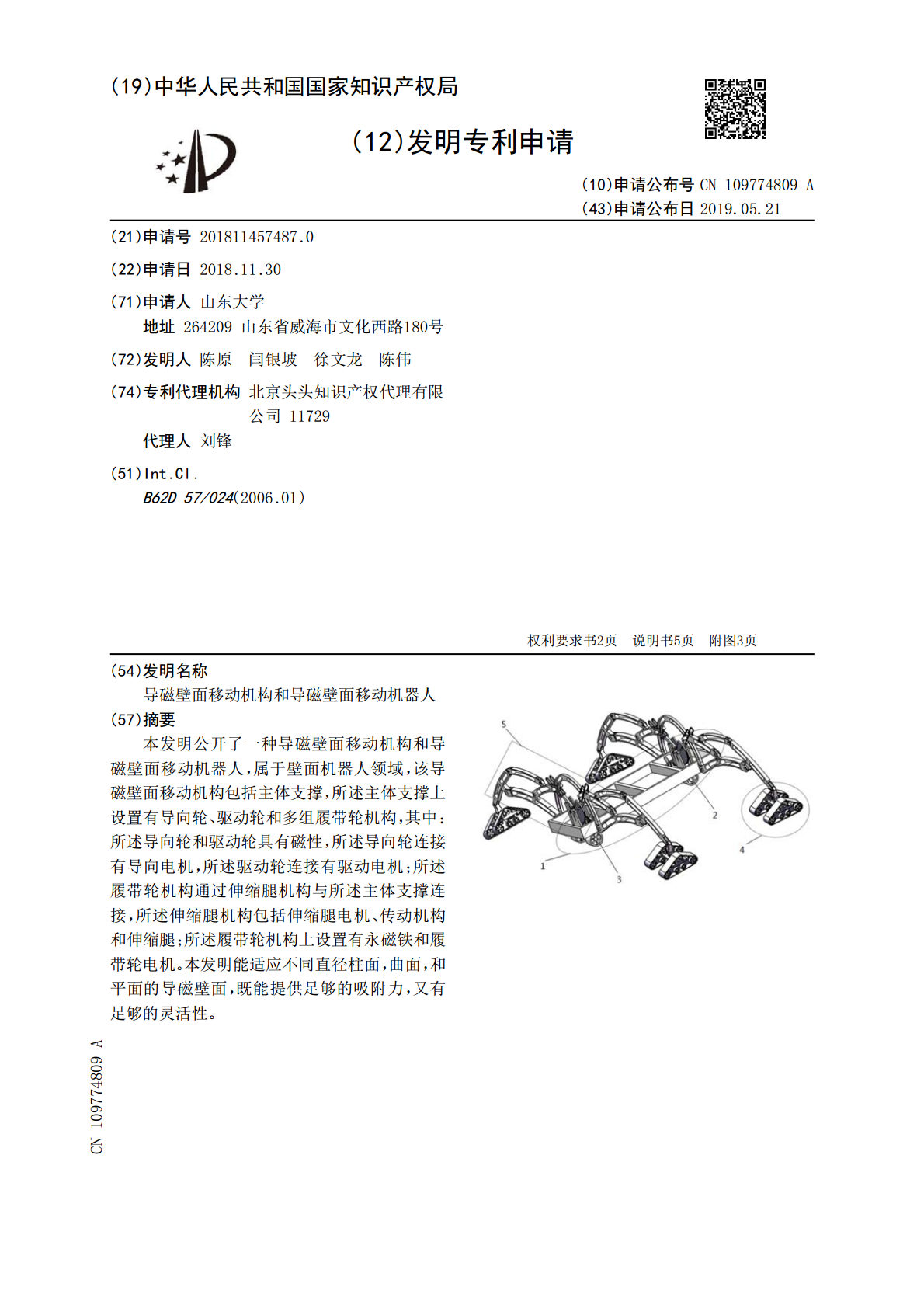
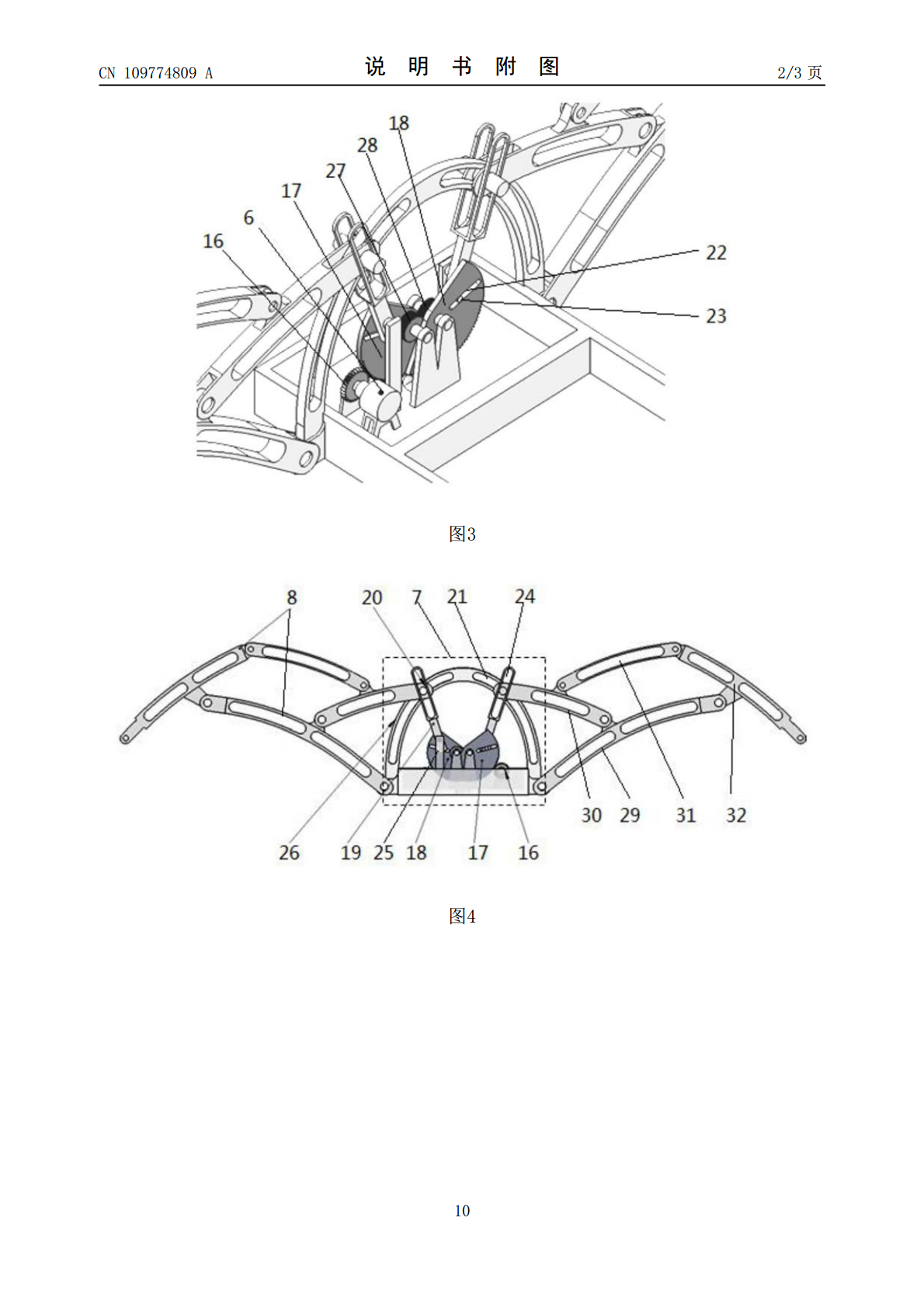
本发明公开了一种导磁壁面移动机构和导磁壁面移动机器人,属于壁面机器人领域,该导磁壁面移动机构包括主体支撑,所述主体支撑上设置有导向轮、驱动轮和多组履带轮机构,其中:所述导向轮和驱动轮具有磁性,所述导向轮连接有导向电机,所述驱动轮连接有驱动电机;所述履带轮机构通过伸缩腿机构与所述主体支撑连接,所述伸缩腿机构包括伸缩腿电机、传动机构和伸缩腿;所述履带轮机构上设置有永磁铁和履带轮电机。本发明能适应不同直径柱面,曲面,和平面的导磁壁面,既能提供足够的吸附力,又有足够的灵活性。
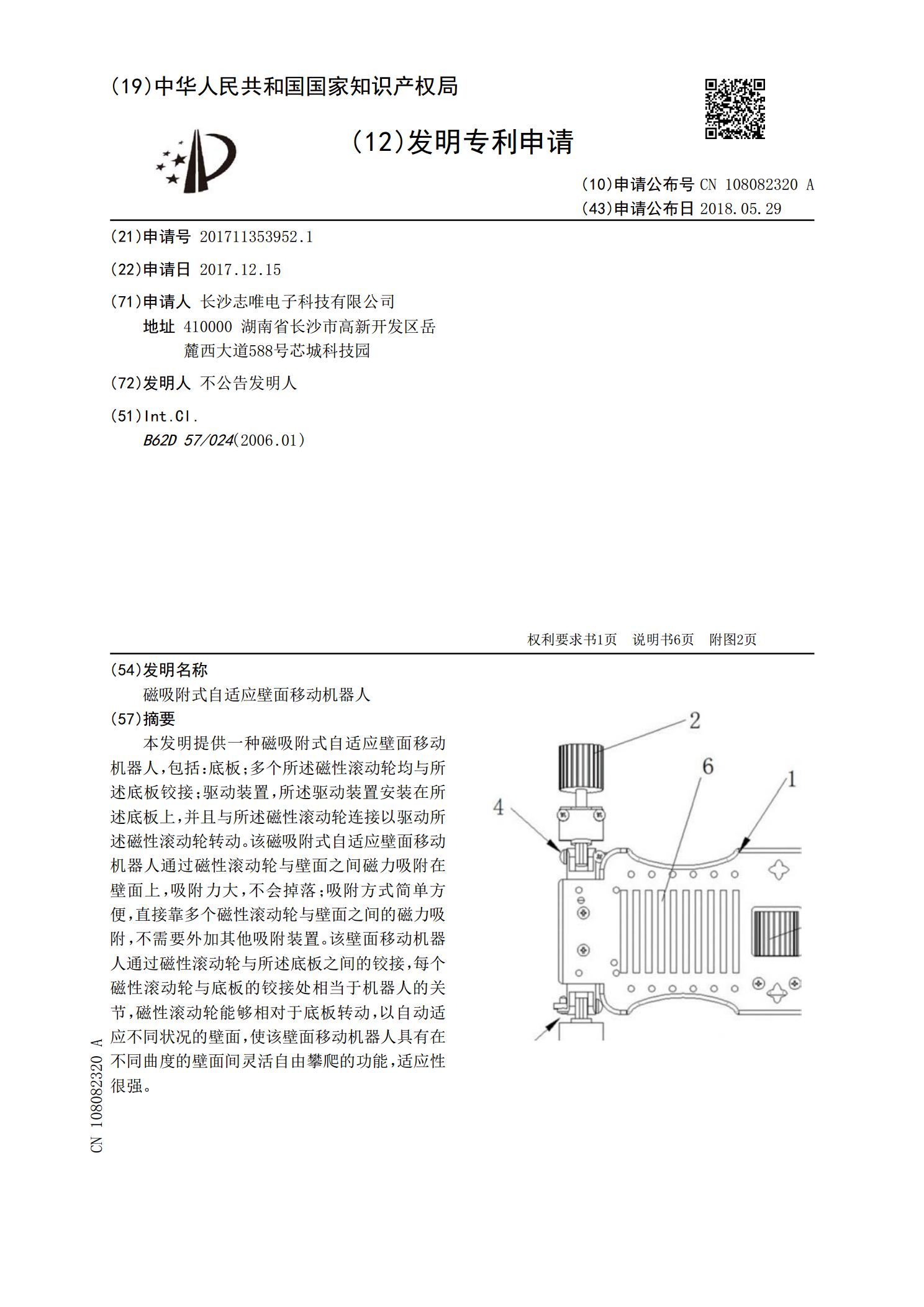
磁吸附式自适应壁面移动机器人.pdf
本发明提供一种磁吸附式自适应壁面移动机器人,包括:底板;多个所述磁性滚动轮均与所述底板铰接;驱动装置,所述驱动装置安装在所述底板上,并且与所述磁性滚动轮连接以驱动所述磁性滚动轮转动。该磁吸附式自适应壁面移动机器人通过磁性滚动轮与壁面之间磁力吸附在壁面上,吸附力大,不会掉落;吸附方式简单方便,直接靠多个磁性滚动轮与壁面之间的磁力吸附,不需要外加其他吸附装置。该壁面移动机器人通过磁性滚动轮与所述底板之间的铰接,每个磁性滚动轮与底板的铰接处相当于机器人的关节,磁性滚动轮能够相对于底板转动,以自动适应不同状况的壁
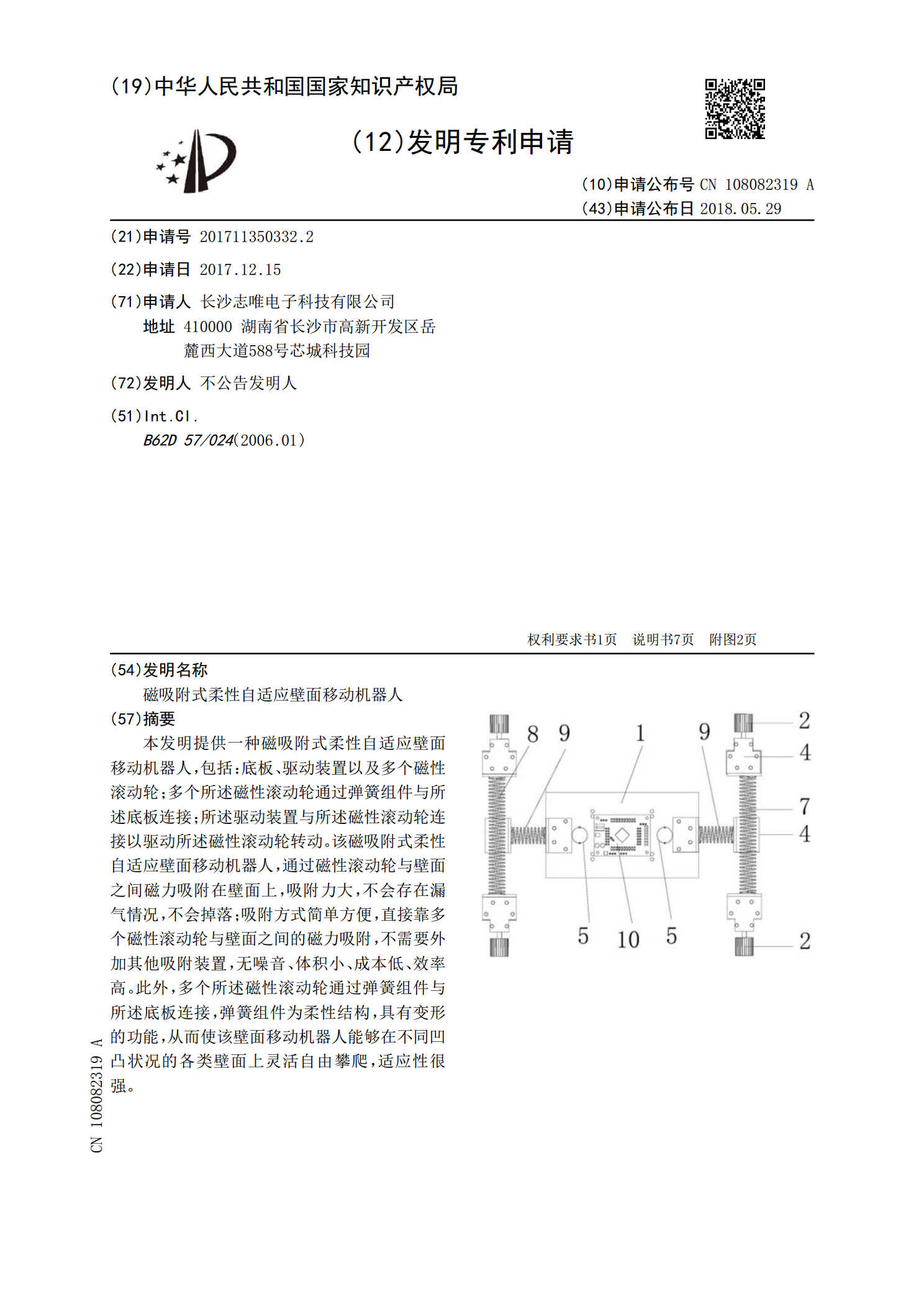
磁吸附式柔性自适应壁面移动机器人.pdf
本发明提供一种磁吸附式柔性自适应壁面移动机器人,包括:底板、驱动装置以及多个磁性滚动轮;多个所述磁性滚动轮通过弹簧组件与所述底板连接;所述驱动装置与所述磁性滚动轮连接以驱动所述磁性滚动轮转动。该磁吸附式柔性自适应壁面移动机器人,通过磁性滚动轮与壁面之间磁力吸附在壁面上,吸附力大,不会存在漏气情况,不会掉落;吸附方式简单方便,直接靠多个磁性滚动轮与壁面之间的磁力吸附,不需要外加其他吸附装置,无噪音、体积小、成本低、效率高。此外,多个所述磁性滚动轮通过弹簧组件与所述底板连接,弹簧组件为柔性结构,具有变形的功能
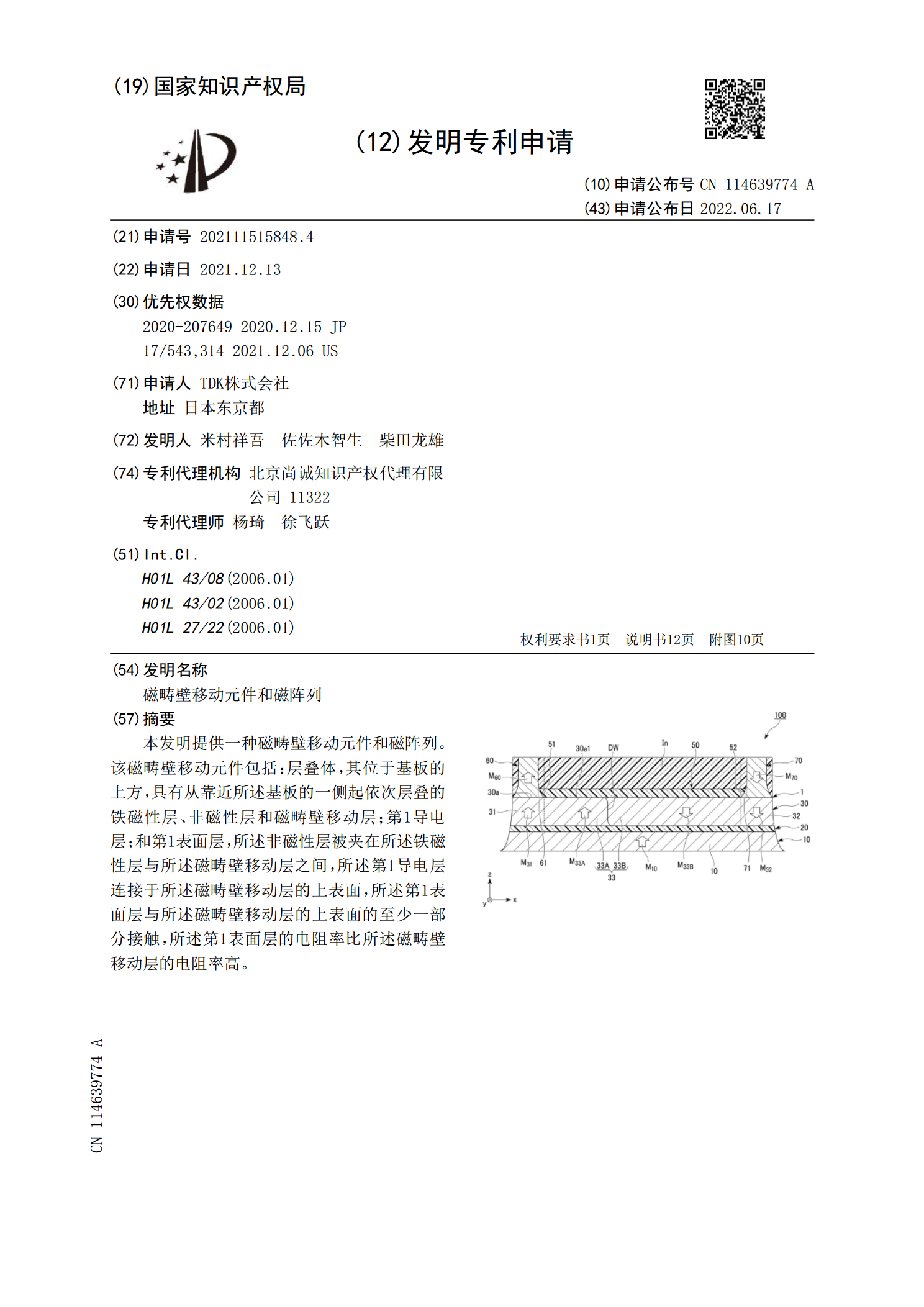
磁畴壁移动元件和磁阵列.pdf
本发明提供一种磁畴壁移动元件和磁阵列。该磁畴壁移动元件包括:层叠体,其位于基板的上方,具有从靠近所述基板的一侧起依次层叠的铁磁性层、非磁性层和磁畴壁移动层;第1导电层;和第1表面层,所述非磁性层被夹在所述铁磁性层与所述磁畴壁移动层之间,所述第1导电层连接于所述磁畴壁移动层的上表面,所述第1表面层与所述磁畴壁移动层的上表面的至少一部分接触,所述第1表面层的电阻率比所述磁畴壁移动层的电阻率高。
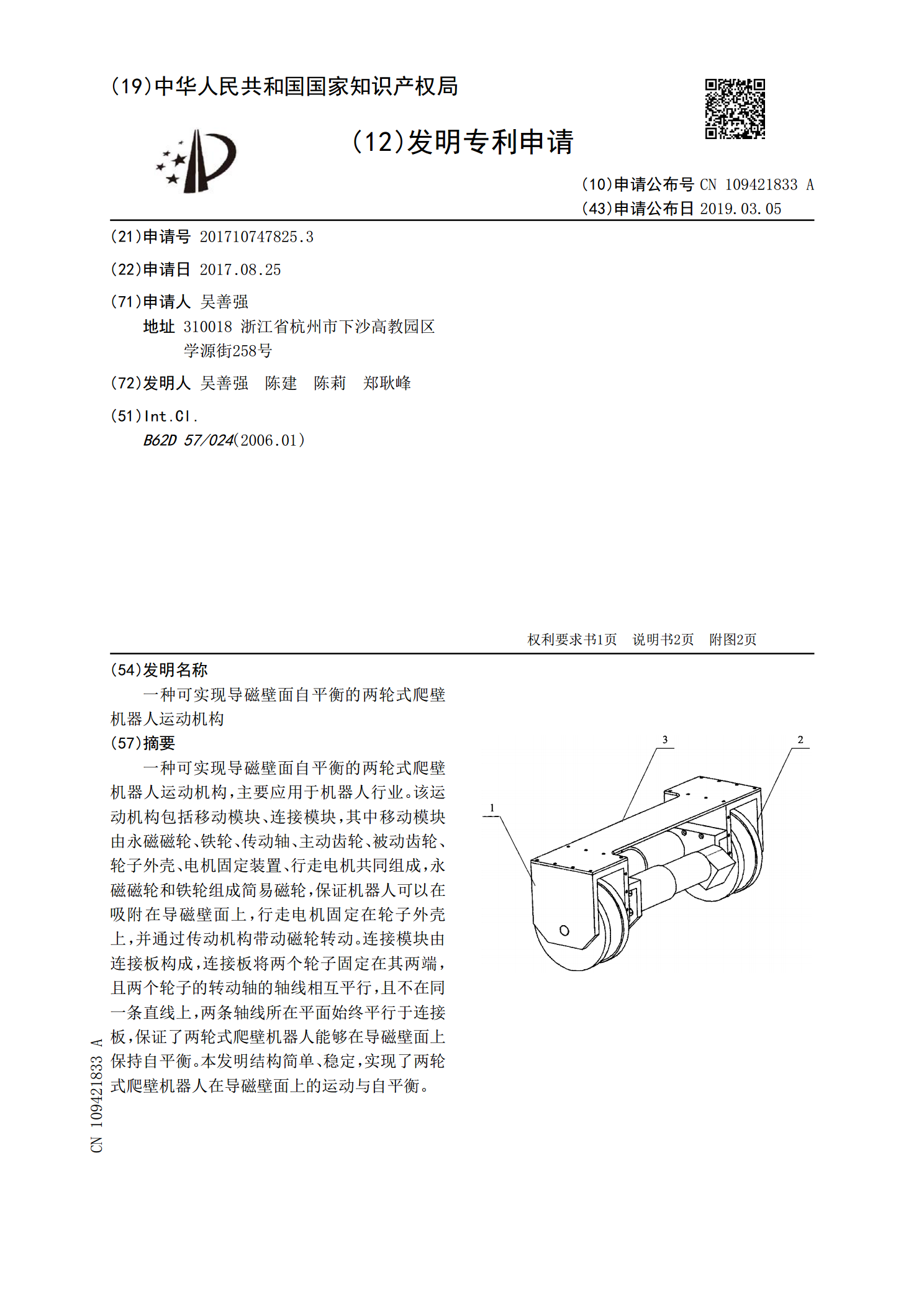
一种可实现导磁壁面自平衡的两轮式爬壁机器人运动机构.pdf
一种可实现导磁壁面自平衡的两轮式爬壁机器人运动机构,主要应用于机器人行业。该运动机构包括移动模块、连接模块,其中移动模块由永磁磁轮、铁轮、传动轴、主动齿轮、被动齿轮、轮子外壳、电机固定装置、行走电机共同组成,永磁磁轮和铁轮组成简易磁轮,保证机器人可以在吸附在导磁壁面上,行走电机固定在轮子外壳上,并通过传动机构带动磁轮转动。连接模块由连接板构成,连接板将两个轮子固定在其两端,且两个轮子的转动轴的轴线相互平行,且不在同一条直线上,两条轴线所在平面始终平行于连接板,保证了两轮式爬壁机器人能够在导磁壁面上保持自平