
一种挖掘机器人用行走机构.pdf

是你****芹呀


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种挖掘机器人用行走机构.pdf
本发明属于挖掘装置领域,具体公开了一种挖掘机器人用行走机构,包括第一行走单元、第二行走单元以及底板,第一行走单元设有两个,且分别位于底板两侧,第一行走单元包括与底板转动连接的驱动轮、支撑轮以及用于驱动驱动轮的第一发动机,还包括将包裹在驱动轮、支撑轮外的履带;第二行走单元包括牵引车、转动连接在牵引车底部的车轮、固定在牵引车上的液压缸以及用于驱动车轮的第二发动机,液压缸内设有活塞杆,底板上设有用于和活塞杆连接的连接槽,牵引车上设有用于驱动液压缸的限位开关,牵引车的高度小于底板距地面的高度,牵引车的宽度小于两履

一种攀爬机器人用行走机构.pdf
本发明公开了一种攀爬机器人用行走机构,包括中间行走机构、两个侧行走机构和两个翻转机构;中间行走机构包括主框架和万向行走机构一;万向行走机构一具有位于主框架内侧的万向轮;两个侧行走机构对称布设在中间行走机构的两侧,每个侧行走机构均包括副框架、驱动行走机构和万向行走机构二;两个副框架均与主框架相铰接,并能在对应翻转机构的驱动下,实现与主框架的相对翻转与夹紧;驱动行走机构和万向行走机构二均设置在副框架上,驱动行走机构具有位于副框架内侧的主动轮,万向行走机构二具有位于副框架内侧的万向轮。本发明一方面能够适应沿斜面

机器人码垛机用行走机构.pdf
本实用新型公开了机器人码垛机用行走机构,包括承载台和底杆。有益效果:在进行对机器人码垛机行走移动时,可将机器人码垛机安装在承载台顶面,而后转动底杆至底杆外伸出承载台,随后,转动第一手柄螺杆推动U型支腿下移至底杆位于U型支腿之间,即可固定底杆,避免在行走时底杆转动,当达到安装地点后,可首先向上转动第一手柄螺杆带动U型支腿上移至不遮挡底杆,即可向内转动底杆至底杆位于承载台下方,即可收起底杆,减少占地面积,同时,工作人员即可向下转动第一手柄螺杆至第一手柄螺杆触地,形成支腿结构,便于稳定摆放,避免了万向轮锁死后仍
一种机器人行走机构.pdf
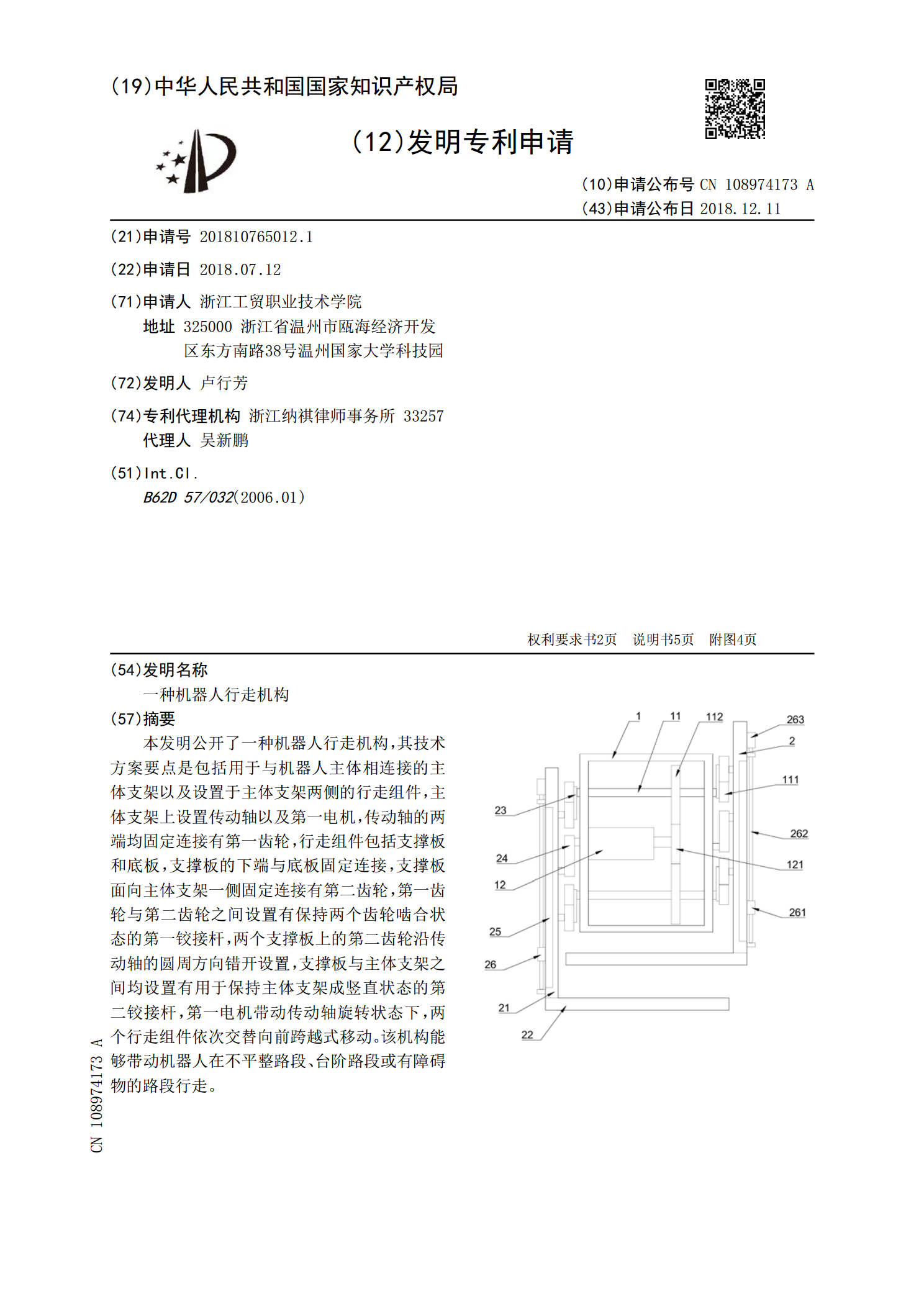
本发明公开了一种机器人行走机构,其技术方案要点是包括用于与机器人主体相连接的主体支架以及设置于主体支架两侧的行走组件,主体支架上设置传动轴以及第一电机,传动轴的两端均固定连接有第一齿轮,行走组件包括支撑板和底板,支撑板的下端与底板固定连接,支撑板面向主体支架一侧固定连接有第二齿轮,第一齿轮与第二齿轮之间设置有保持两个齿轮啮合状态的第一铰接杆,两个支撑板上的第二齿轮沿传动轴的圆周方向错开设置,支撑板与主体支架之间均设置有用于保持主体支架成竖直状态的第二铰接杆,第一电机带动传动轴旋转状态下,两个行走组件依次交

一种机器人行走机构.pdf
本发明公开了一种机器人行走机构,包括底盘,所述底盘的前部的左右两侧和底盘后部的左右两侧各设有一个行走腿,所述底盘内固定有两个双头步进电机,所述双头步进电机的四个主轴分别与四个行走腿固定相连,所述每根行走腿上均设有一个旋转步进电机,所述旋转步进电机的主轴分别与一个带轮连接板固定连接,所述每块带轮连接板上均有一个滚动步进电机,所述滚动步进电机的外部套接有一个主动带轮,所述主动带轮上设有转轴,所述转轴与滚动步进电机的主轴固定连接,所述旋转步进电机的外围套接有一个从动带轮,所述从动带轮和主动带轮之间设有同步带。本