
一种旋转式双激光轮廓测量方法、存储装置及测量装置.pdf

夏萍****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种旋转式双激光轮廓测量方法、存储装置及测量装置.pdf
本发明公开了一种旋转式双激光轮廓测量方法、存储装置及测量装置,包括如下步骤:检测主机分别开启数据采集器和位于试件两侧的一对激光测距仪,并控制旋转底座以预定转速带动试件转动;一对激光测距仪对试件进行两侧点扫信息采集,记录试件在当前平面各对轮廓检测点的两侧测量数据;旋转底座旋转一周后,激光测距仪沿支架上升预定高度,并重新对试件进行新的点扫信息采集,记录试件在新高度平面的各对轮廓检测点的两侧测量数据;依次重复上述步骤,直至完成对试件各高度平面的点扫信息采集,记录为工况一数据并进行计算得到试件的形状。从而本发明不

一种旋转式激光轮廓测量方法、存储装置及其测量装置.pdf
本发明公开了一种旋转式激光轮廓测量方法、存储装置及其测量装置,包括如下步骤:检测主机分别开启数据采集器和激光测距仪,并控制旋转底座以预定转速带动试件转动;激光测距仪对试件进行点扫信息采集,记录试件在当前平面各个轮廓检测点的测量数据;旋转底座旋转一周后,激光测距仪沿支架上升预定高度,并重新对试件进行新高度平面的点扫信息采集,记录试件在新高度平面的各个轮廓检测点的测量数据;依次重复上述步骤,直至完成对试件各高度平面的点扫信息采集;通过试件的各高度平面的各个轮廓检测点的测量数据,计算得到试件的形状。本发明不仅避
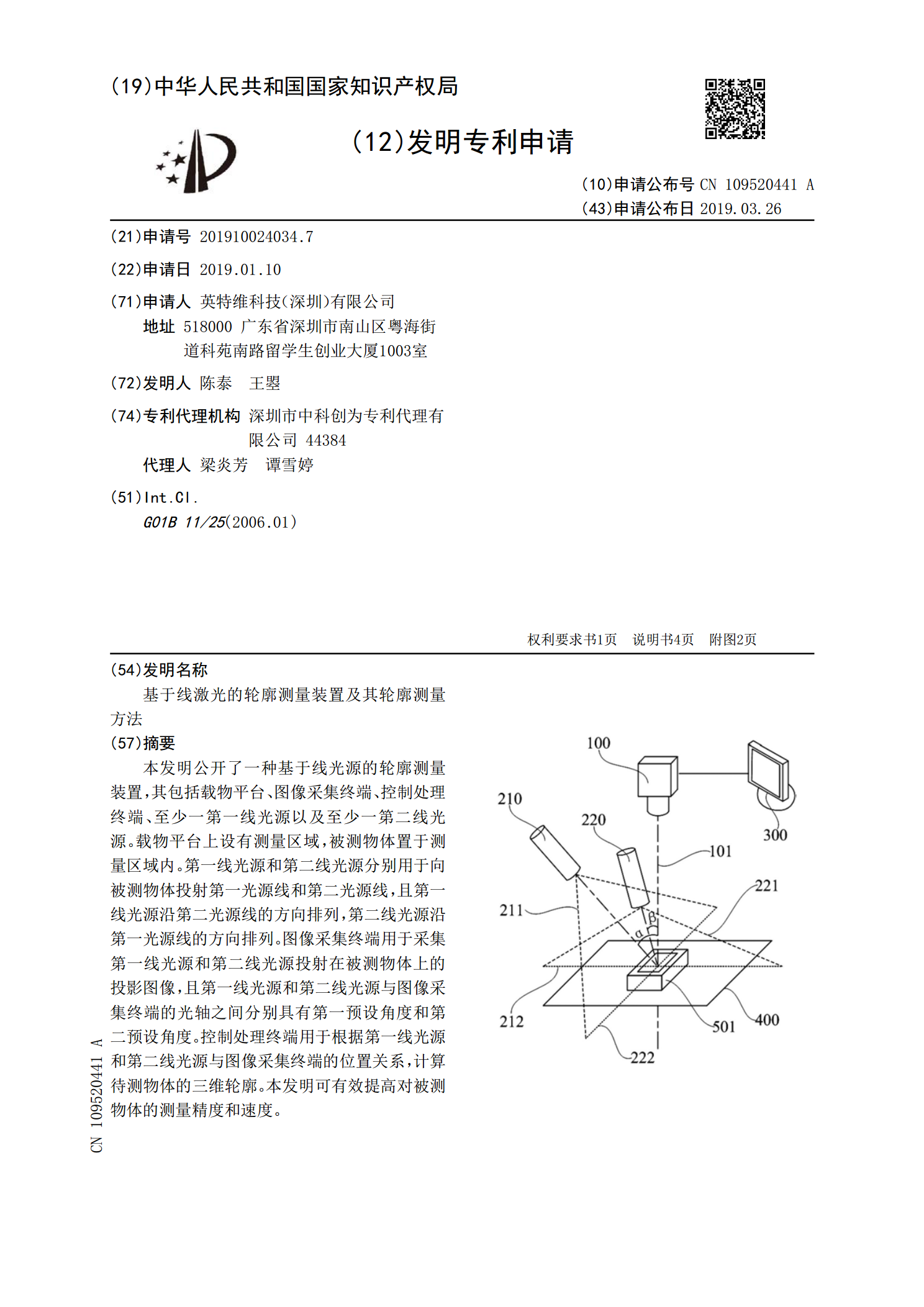
基于线激光的轮廓测量装置及其轮廓测量方法.pdf
本发明公开了一种基于线光源的轮廓测量装置,其包括载物平台、图像采集终端、控制处理终端、至少一第一线光源以及至少一第二线光源。载物平台上设有测量区域,被测物体置于测量区域内。第一线光源和第二线光源分别用于向被测物体投射第一光源线和第二光源线,且第一线光源沿第二光源线的方向排列,第二线光源沿第一光源线的方向排列。图像采集终端用于采集第一线光源和第二线光源投射在被测物体上的投影图像,且第一线光源和第二线光源与图像采集终端的光轴之间分别具有第一预设角度和第二预设角度。控制处理终端用于根据第一线光源和第二线光源与图
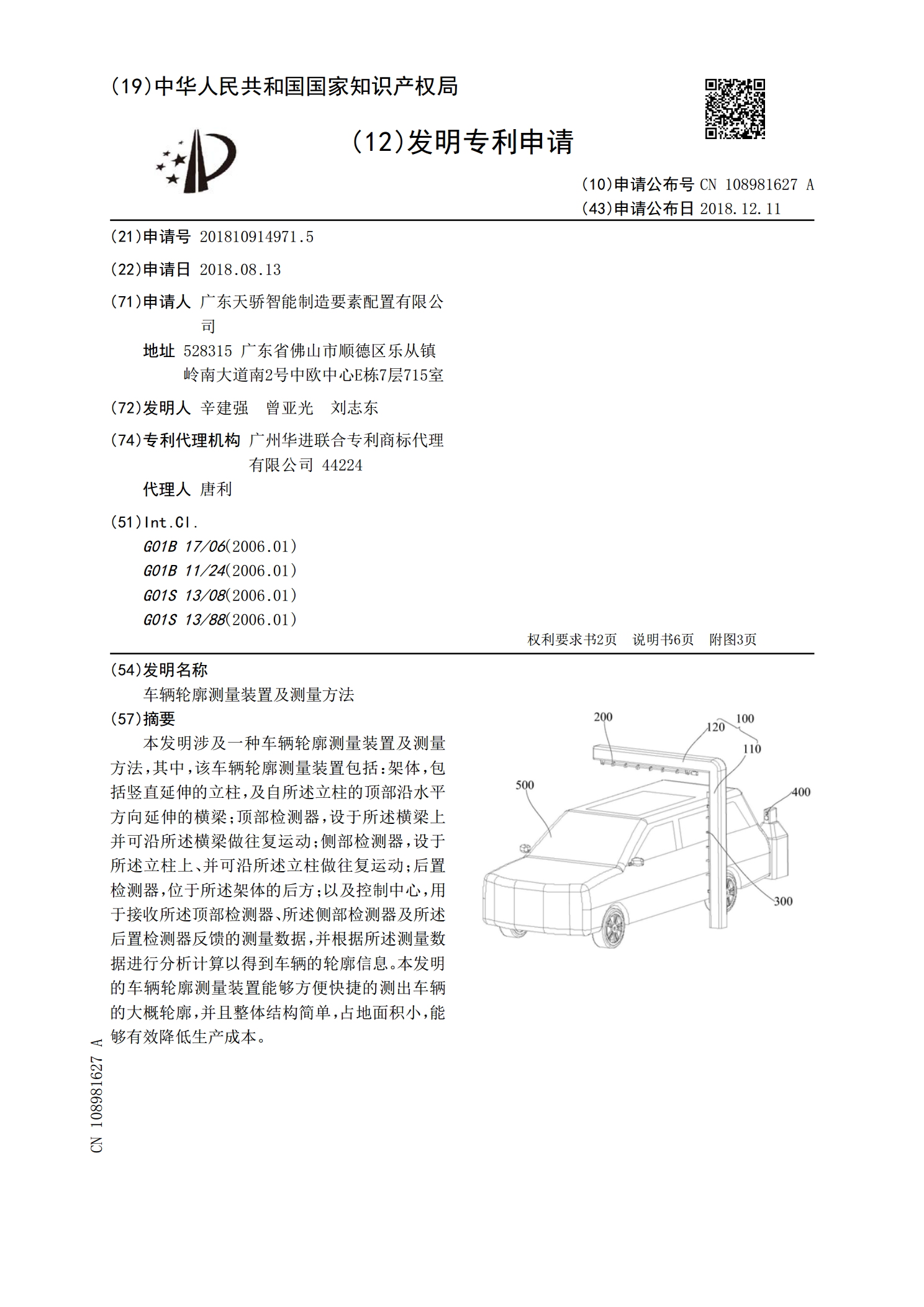
车辆轮廓测量装置及测量方法.pdf
本发明涉及一种车辆轮廓测量装置及测量方法,其中,该车辆轮廓测量装置包括:架体,包括竖直延伸的立柱,及自所述立柱的顶部沿水平方向延伸的横梁;顶部检测器,设于所述横梁上并可沿所述横梁做往复运动;侧部检测器,设于所述立柱上、并可沿所述立柱做往复运动;后置检测器,位于所述架体的后方;以及控制中心,用于接收所述顶部检测器、所述侧部检测器及所述后置检测器反馈的测量数据,并根据所述测量数据进行分析计算以得到车辆的轮廓信息。本发明的车辆轮廓测量装置能够方便快捷的测出车辆的大概轮廓,并且整体结构简单,占地面积小,能够有效降

一种在机测量曲轴轮廓的测量方法及装置.pdf
本发明涉及一种在机测量曲轴轮廓的测量方法和装置。该方法充分利用了数控非圆磨床各个轴本身的高精度运动性能,通过安装在相应位置的位移测量装置返回位移数据,然后充分利用曲轴非圆磨削运动模型本身的特点来控制砂轮架相对于头架做跟随运动,安装在导轨上测头,在汽缸的作用下,只需做小幅的往复运动即可使测头与工件保持接触。按顺序采集机床C轴位移、X轴位移及楔形测头上光栅的读数,对以上数据采用圆度评定方法进行处理,即可得到准确的曲轴轮廓误差。本发明在很大程度上减轻了对曲轴轮廓专用检测设备的依赖,利用数控磨床本身的运动特性及相