
一种旋转式激光轮廓测量方法、存储装置及其测量装置.pdf

Ke****67


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种旋转式激光轮廓测量方法、存储装置及其测量装置.pdf
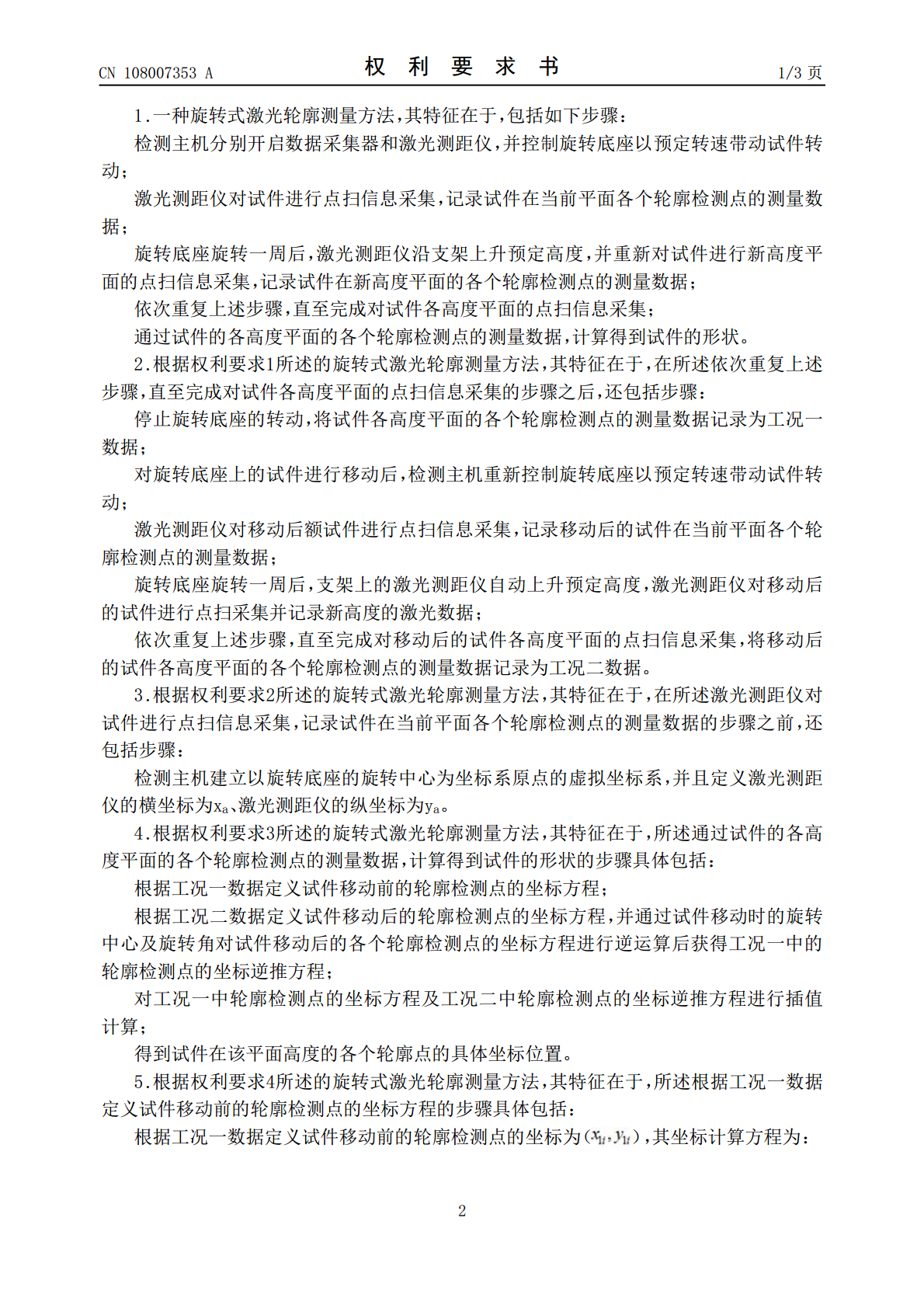
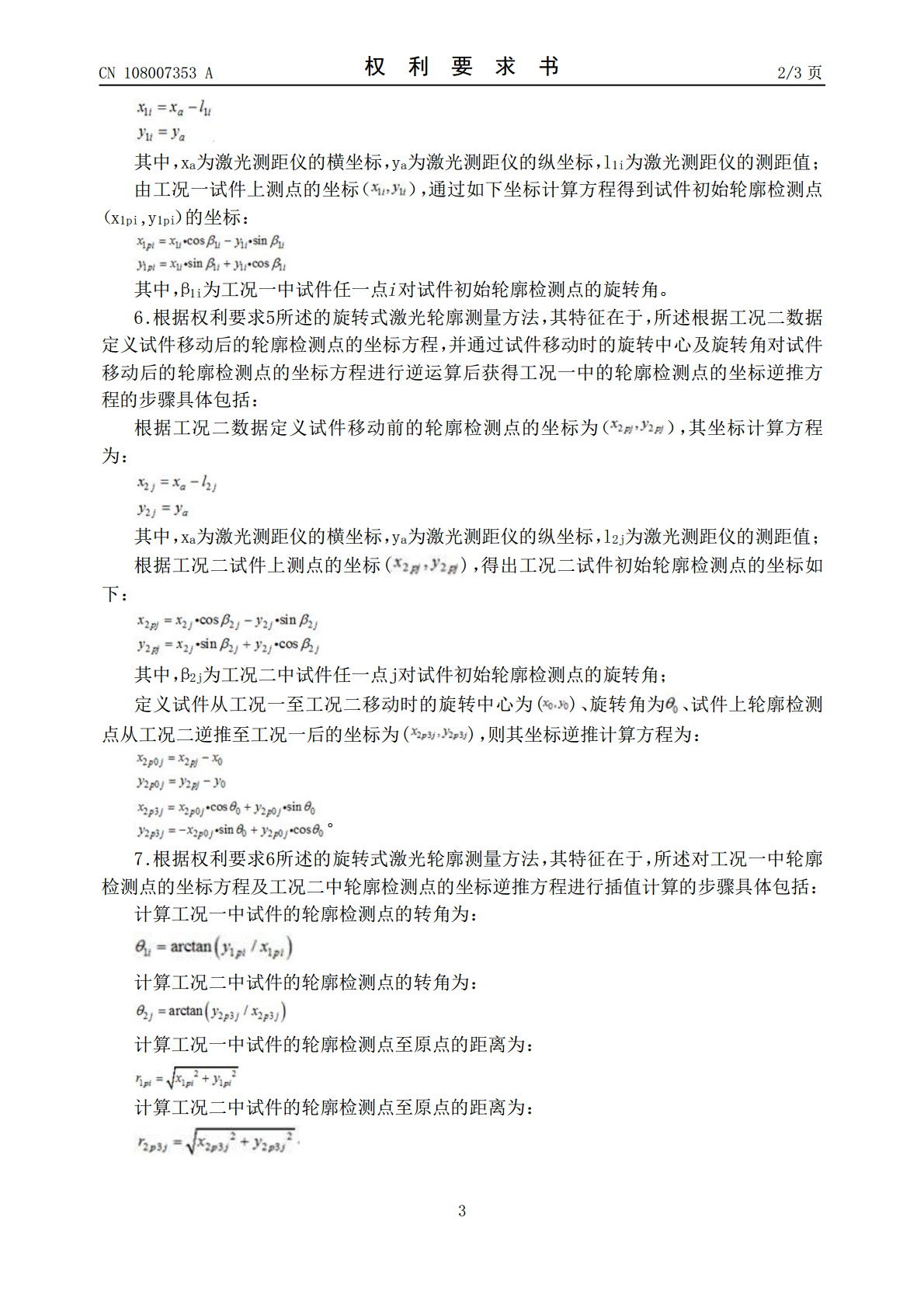
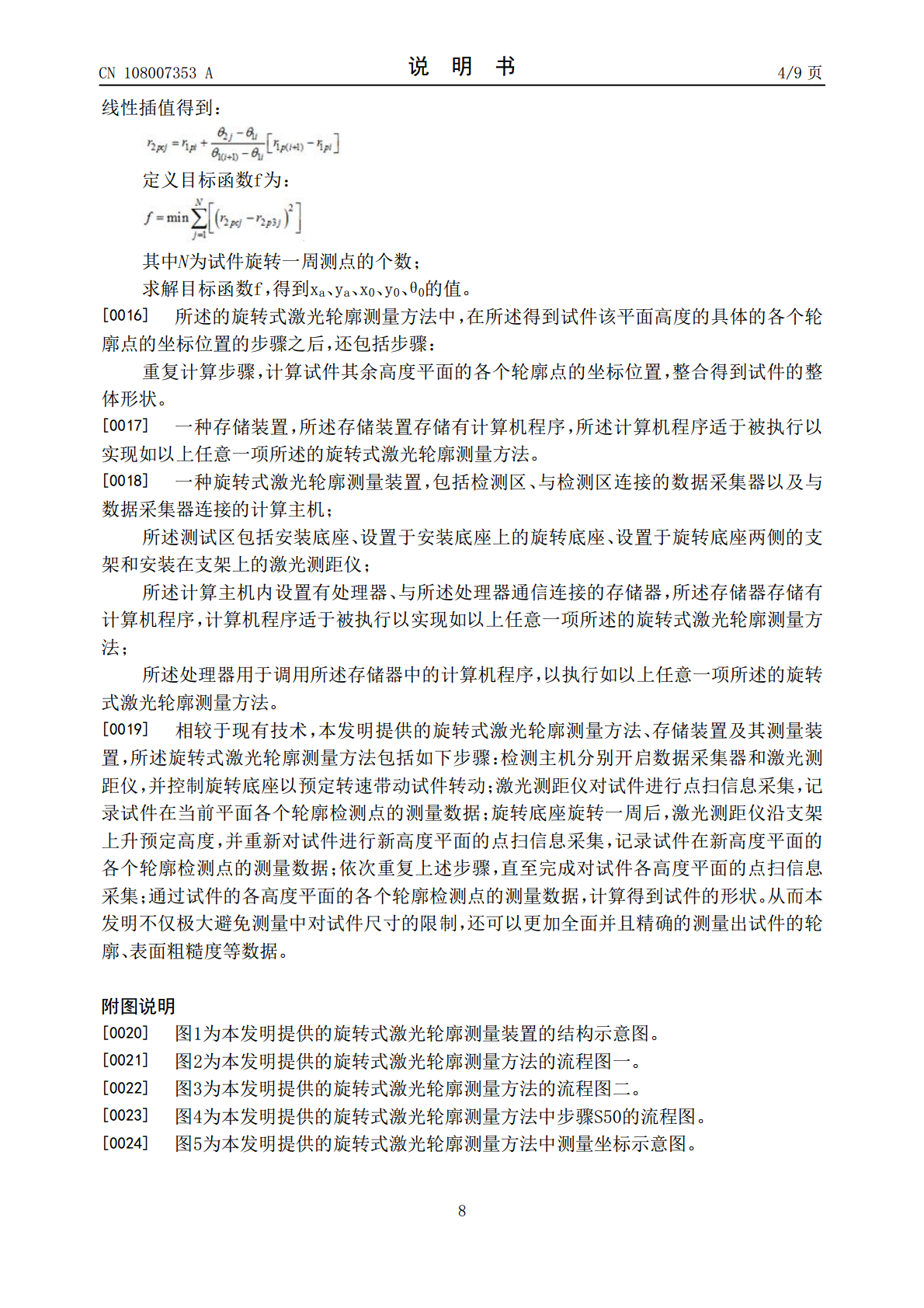
本发明公开了一种旋转式激光轮廓测量方法、存储装置及其测量装置,包括如下步骤:检测主机分别开启数据采集器和激光测距仪,并控制旋转底座以预定转速带动试件转动;激光测距仪对试件进行点扫信息采集,记录试件在当前平面各个轮廓检测点的测量数据;旋转底座旋转一周后,激光测距仪沿支架上升预定高度,并重新对试件进行新高度平面的点扫信息采集,记录试件在新高度平面的各个轮廓检测点的测量数据;依次重复上述步骤,直至完成对试件各高度平面的点扫信息采集;通过试件的各高度平面的各个轮廓检测点的测量数据,计算得到试件的形状。本发明不仅避

一种旋转式双激光轮廓测量方法、存储装置及测量装置.pdf
本发明公开了一种旋转式双激光轮廓测量方法、存储装置及测量装置,包括如下步骤:检测主机分别开启数据采集器和位于试件两侧的一对激光测距仪,并控制旋转底座以预定转速带动试件转动;一对激光测距仪对试件进行两侧点扫信息采集,记录试件在当前平面各对轮廓检测点的两侧测量数据;旋转底座旋转一周后,激光测距仪沿支架上升预定高度,并重新对试件进行新的点扫信息采集,记录试件在新高度平面的各对轮廓检测点的两侧测量数据;依次重复上述步骤,直至完成对试件各高度平面的点扫信息采集,记录为工况一数据并进行计算得到试件的形状。从而本发明不
基于线激光的轮廓测量装置及其轮廓测量方法.pdf
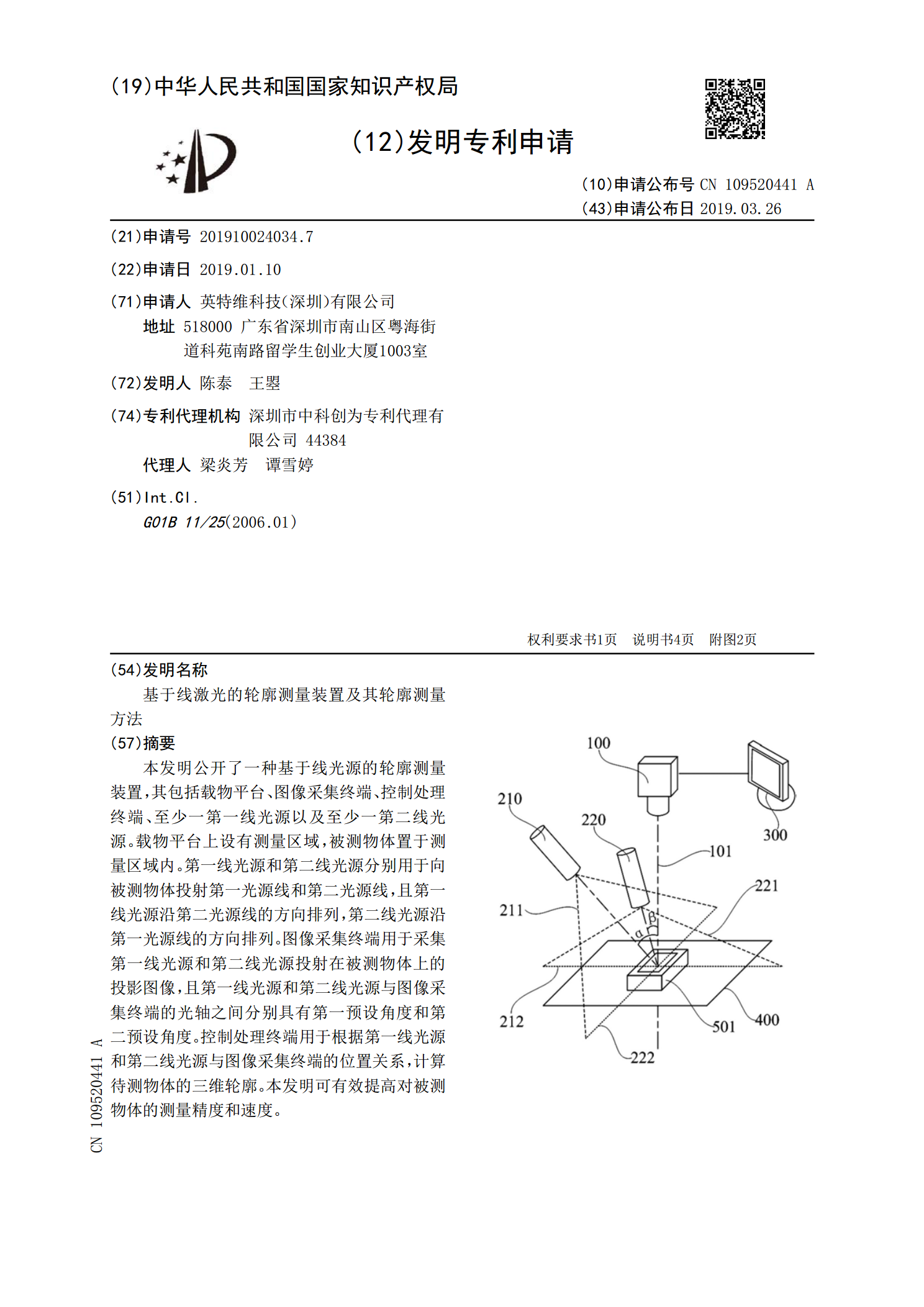
本发明公开了一种基于线光源的轮廓测量装置,其包括载物平台、图像采集终端、控制处理终端、至少一第一线光源以及至少一第二线光源。载物平台上设有测量区域,被测物体置于测量区域内。第一线光源和第二线光源分别用于向被测物体投射第一光源线和第二光源线,且第一线光源沿第二光源线的方向排列,第二线光源沿第一光源线的方向排列。图像采集终端用于采集第一线光源和第二线光源投射在被测物体上的投影图像,且第一线光源和第二线光源与图像采集终端的光轴之间分别具有第一预设角度和第二预设角度。控制处理终端用于根据第一线光源和第二线光源与图
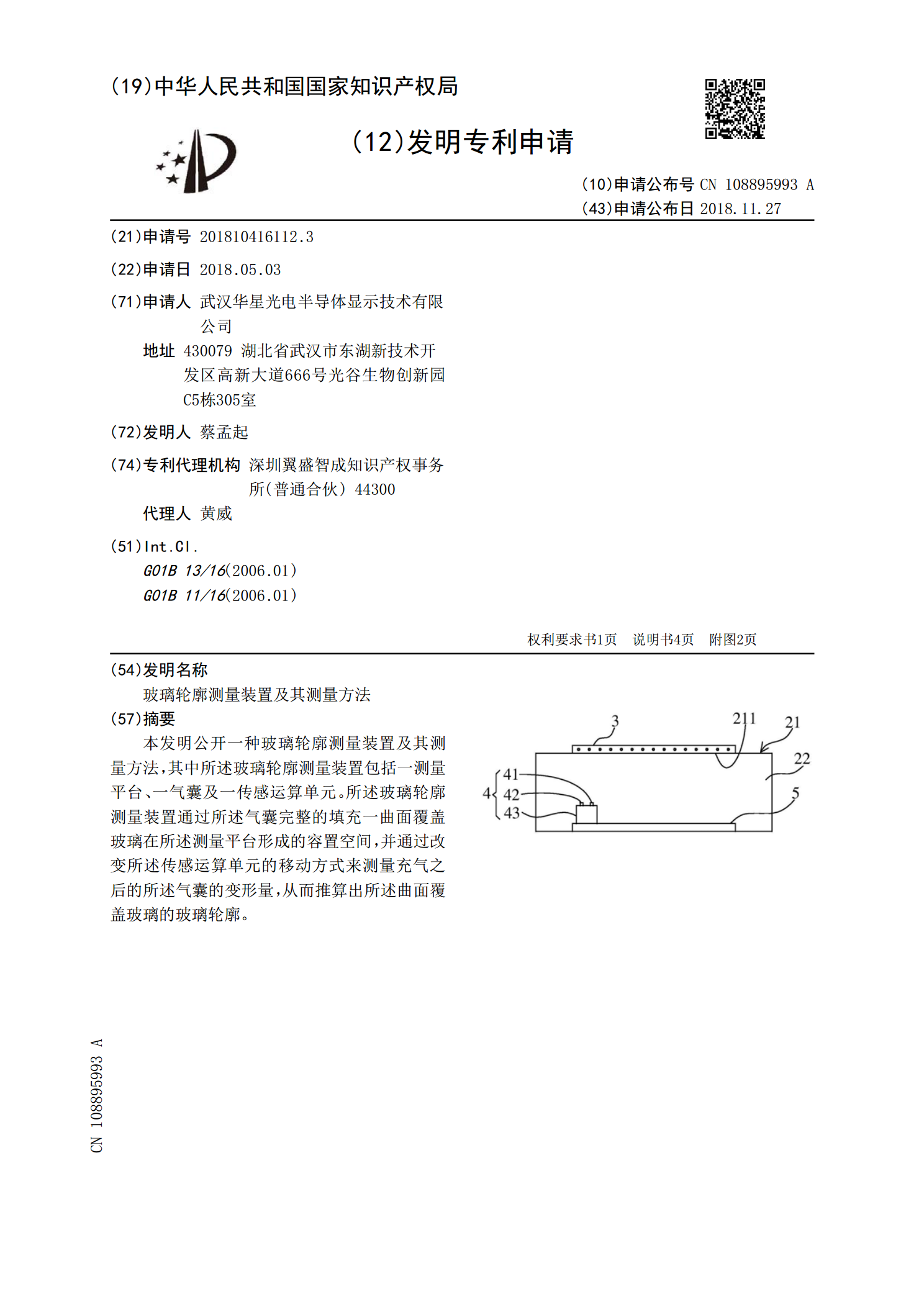
玻璃轮廓测量装置及其测量方法.pdf
本发明公开一种玻璃轮廓测量装置及其测量方法,其中所述玻璃轮廓测量装置包括一测量平台、一气囊及一传感运算单元。所述玻璃轮廓测量装置通过所述气囊完整的填充一曲面覆盖玻璃在所述测量平台形成的容置空间,并通过改变所述传感运算单元的移动方式来测量充气之后的所述气囊的变形量,从而推算出所述曲面覆盖玻璃的玻璃轮廓。
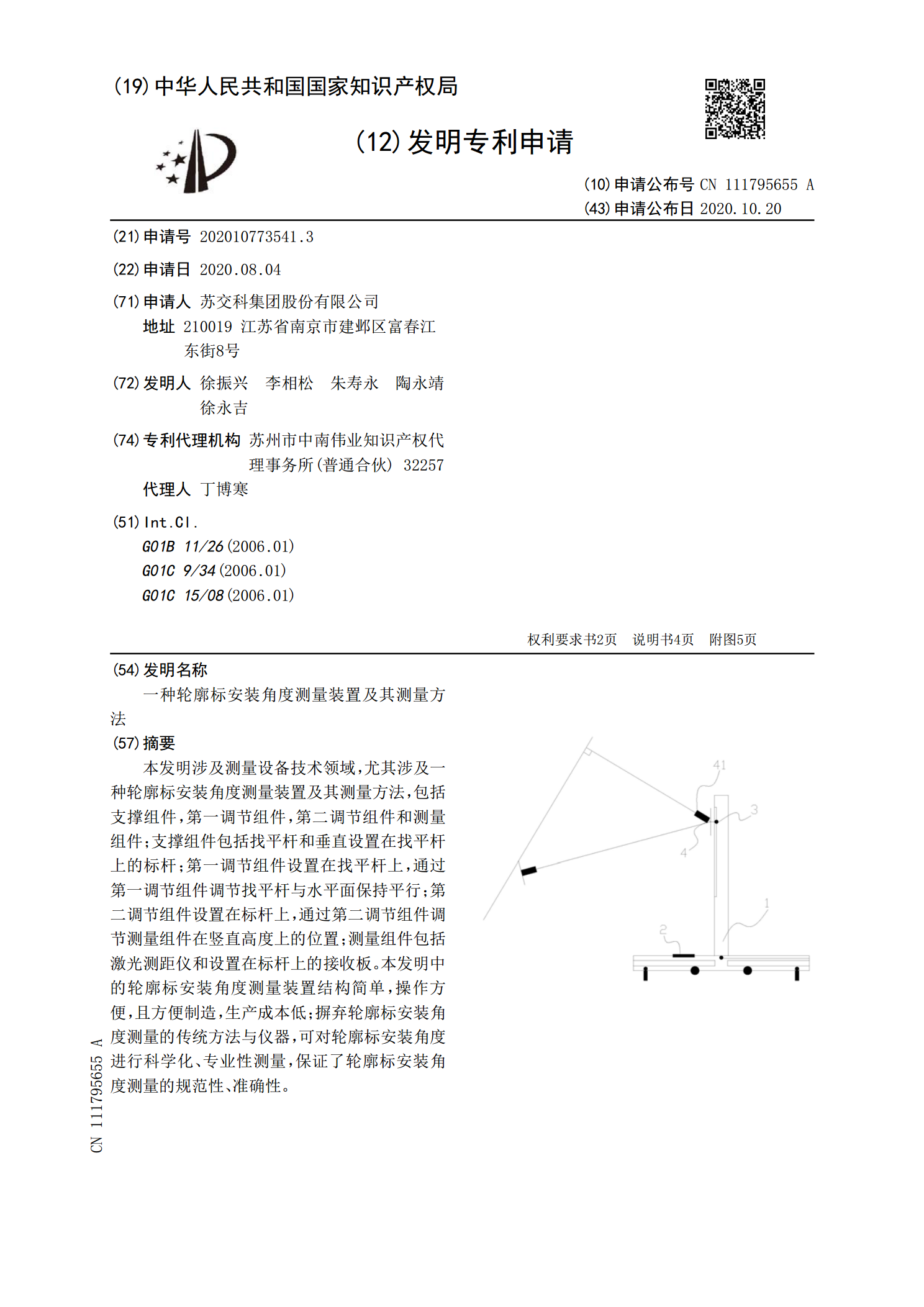
一种轮廓标安装角度测量装置及其测量方法.pdf
本发明涉及测量设备技术领域,尤其涉及一种轮廓标安装角度测量装置及其测量方法,包括支撑组件,第一调节组件,第二调节组件和测量组件;支撑组件包括找平杆和垂直设置在找平杆上的标杆;第一调节组件设置在找平杆上,通过第一调节组件调节找平杆与水平面保持平行;第二调节组件设置在标杆上,通过第二调节组件调节测量组件在竖直高度上的位置;测量组件包括激光测距仪和设置在标杆上的接收板。本发明中的轮廓标安装角度测量装置结构简单,操作方便,且方便制造,生产成本低;摒弃轮廓标安装角度测量的传统方法与仪器,可对轮廓标安装角度进行科学化