
轮式机器人及其底盘装置.pdf

骊蓉****23

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
轮式机器人及其底盘装置.pdf
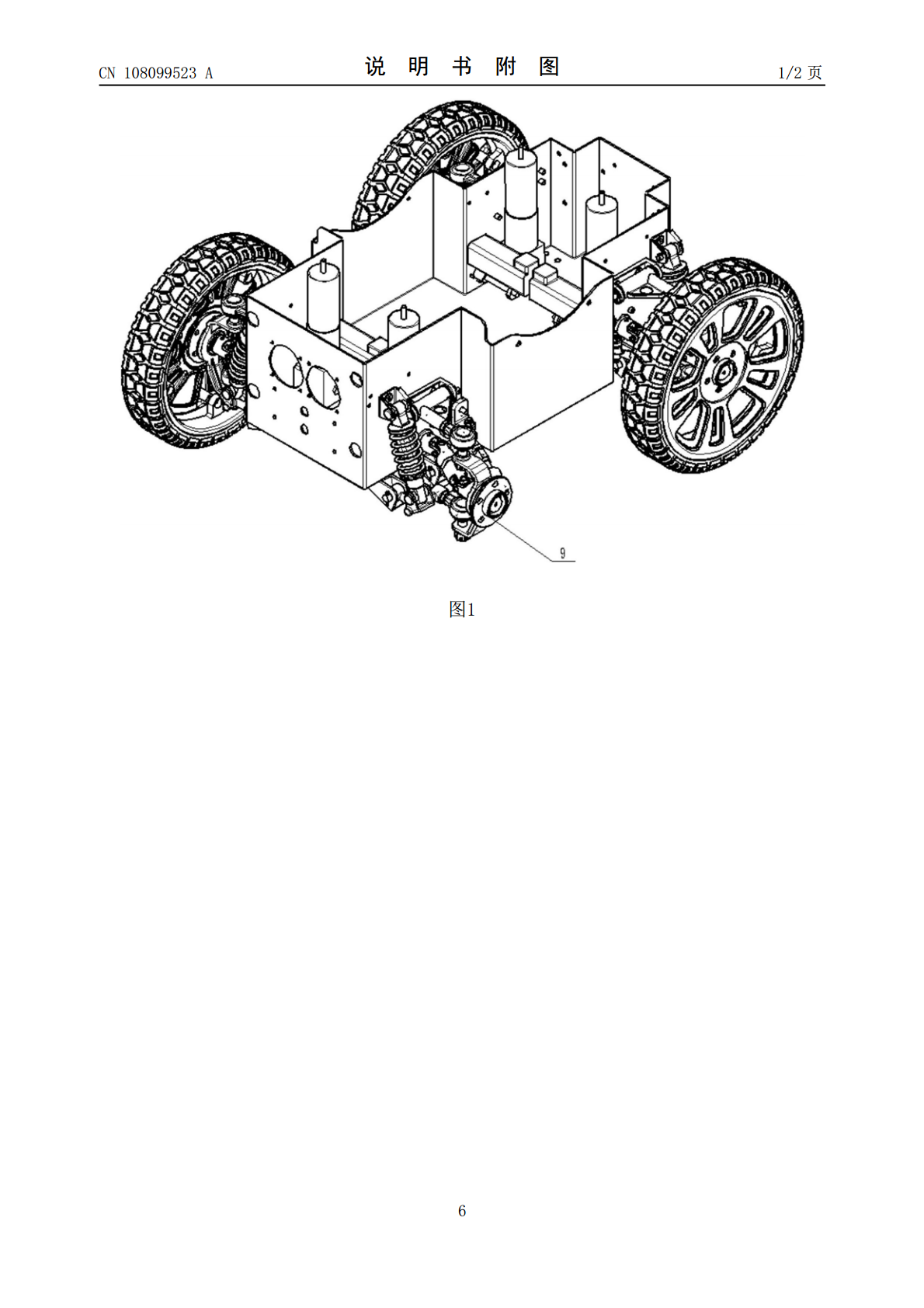
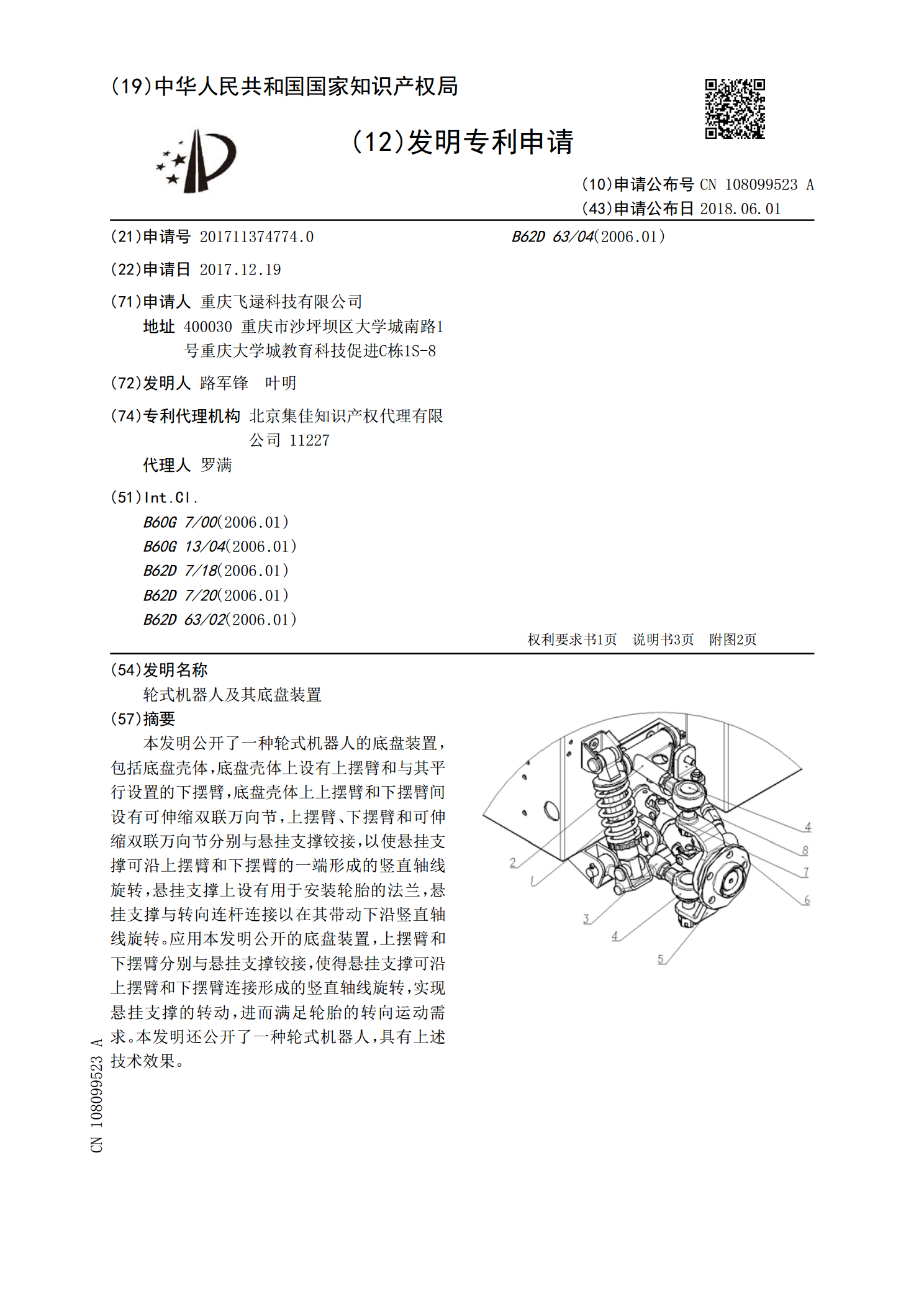
本发明公开了一种轮式机器人的底盘装置,包括底盘壳体,底盘壳体上设有上摆臂和与其平行设置的下摆臂,底盘壳体上上摆臂和下摆臂间设有可伸缩双联万向节,上摆臂、下摆臂和可伸缩双联万向节分别与悬挂支撑铰接,以使悬挂支撑可沿上摆臂和下摆臂的一端形成的竖直轴线旋转,悬挂支撑上设有用于安装轮胎的法兰,悬挂支撑与转向连杆连接以在其带动下沿竖直轴线旋转。应用本发明公开的底盘装置,上摆臂和下摆臂分别与悬挂支撑铰接,使得悬挂支撑可沿上摆臂和下摆臂连接形成的竖直轴线旋转,实现悬挂支撑的转动,进而满足轮胎的转向运动需求。本发明还公开
轮式移动机器人底盘直线悬挂减震装置.pdf
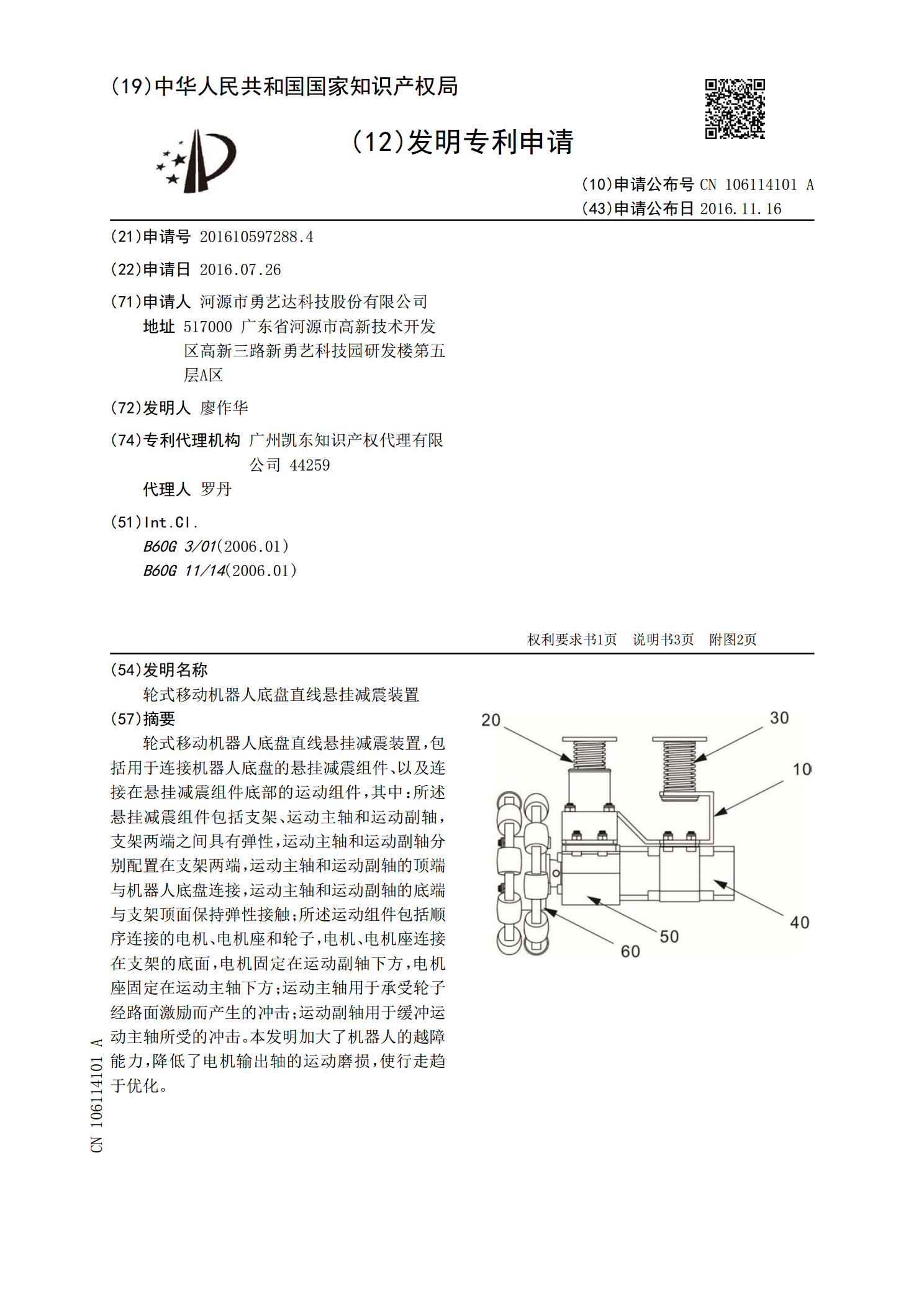
轮式移动机器人底盘直线悬挂减震装置,包括用于连接机器人底盘的悬挂减震组件、以及连接在悬挂减震组件底部的运动组件,其中:所述悬挂减震组件包括支架、运动主轴和运动副轴,支架两端之间具有弹性,运动主轴和运动副轴分别配置在支架两端,运动主轴和运动副轴的顶端与机器人底盘连接,运动主轴和运动副轴的底端与支架顶面保持弹性接触;所述运动组件包括顺序连接的电机、电机座和轮子,电机、电机座连接在支架的底面,电机固定在运动副轴下方,电机座固定在运动主轴下方;运动主轴用于承受轮子经路面激励而产生的冲击;运动副轴用于缓冲运动主轴所
一种非接触轮式爬壁机器人底盘装置.pdf
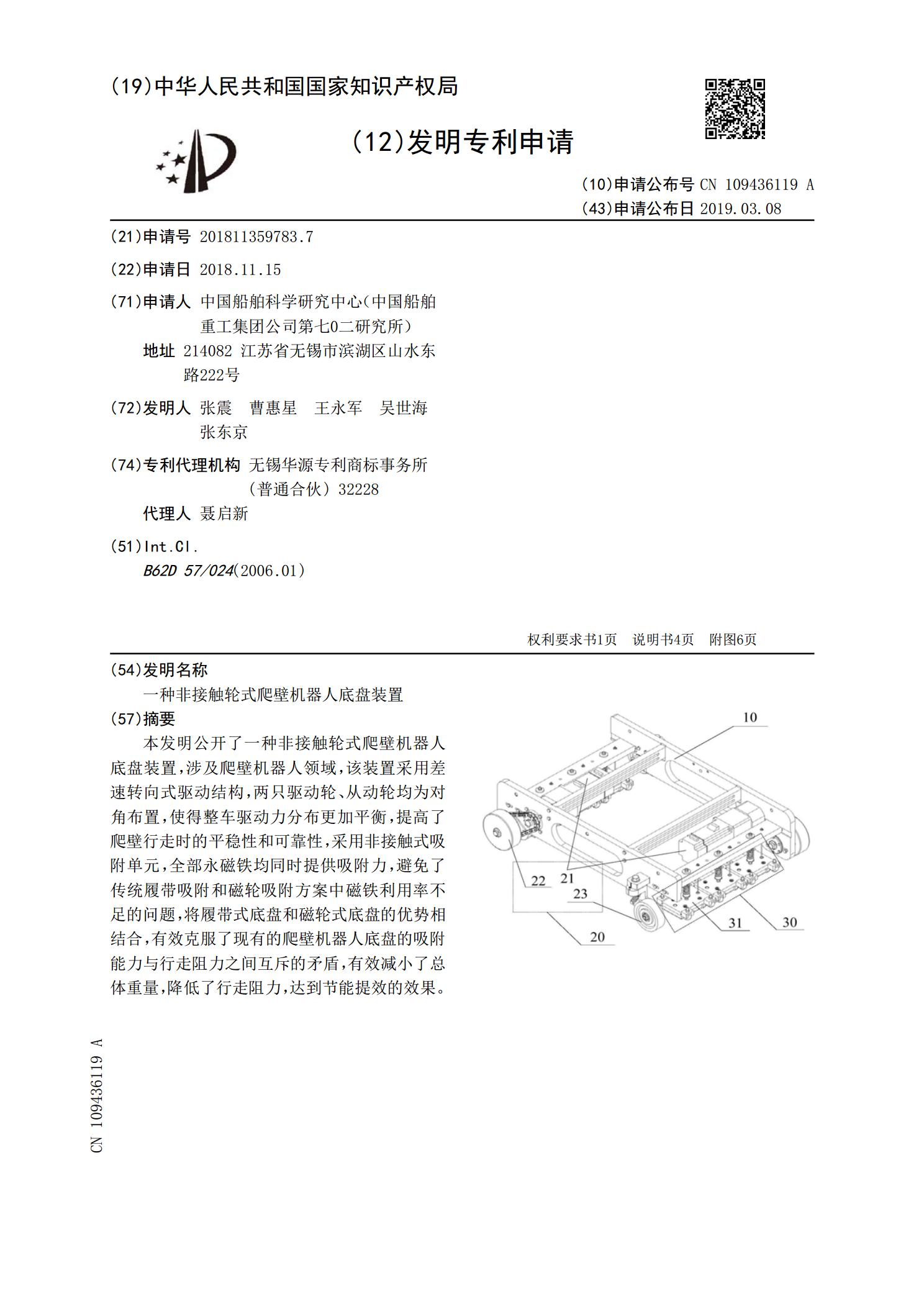
本发明公开了一种非接触轮式爬壁机器人底盘装置,涉及爬壁机器人领域,该装置采用差速转向式驱动结构,两只驱动轮、从动轮均为对角布置,使得整车驱动力分布更加平衡,提高了爬壁行走时的平稳性和可靠性,采用非接触式吸附单元,全部永磁铁均同时提供吸附力,避免了传统履带吸附和磁轮吸附方案中磁铁利用率不足的问题,将履带式底盘和磁轮式底盘的优势相结合,有效克服了现有的爬壁机器人底盘的吸附能力与行走阻力之间互斥的矛盾,有效减小了总体重量,降低了行走阻力,达到节能提效的效果。
一种轮式机器人底盘.pdf
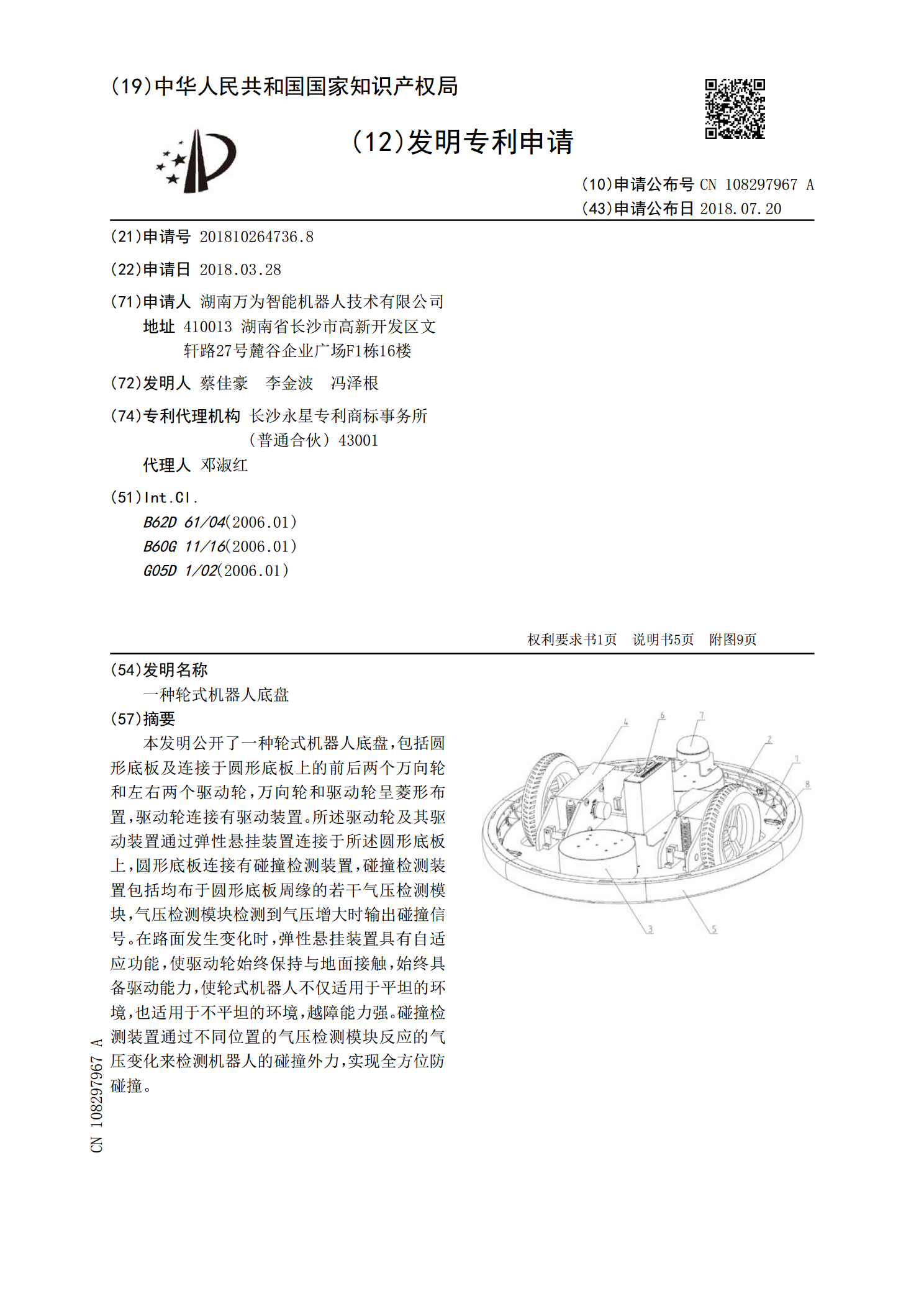
本发明公开了一种轮式机器人底盘,包括圆形底板及连接于圆形底板上的前后两个万向轮和左右两个驱动轮,万向轮和驱动轮呈菱形布置,驱动轮连接有驱动装置。所述驱动轮及其驱动装置通过弹性悬挂装置连接于所述圆形底板上,圆形底板连接有碰撞检测装置,碰撞检测装置包括均布于圆形底板周缘的若干气压检测模块,气压检测模块检测到气压增大时输出碰撞信号。在路面发生变化时,弹性悬挂装置具有自适应功能,使驱动轮始终保持与地面接触,始终具备驱动能力,使轮式机器人不仅适用于平坦的环境,也适用于不平坦的环境,越障能力强。碰撞检测装置通过不同位
一种轮式机器人底盘.pdf
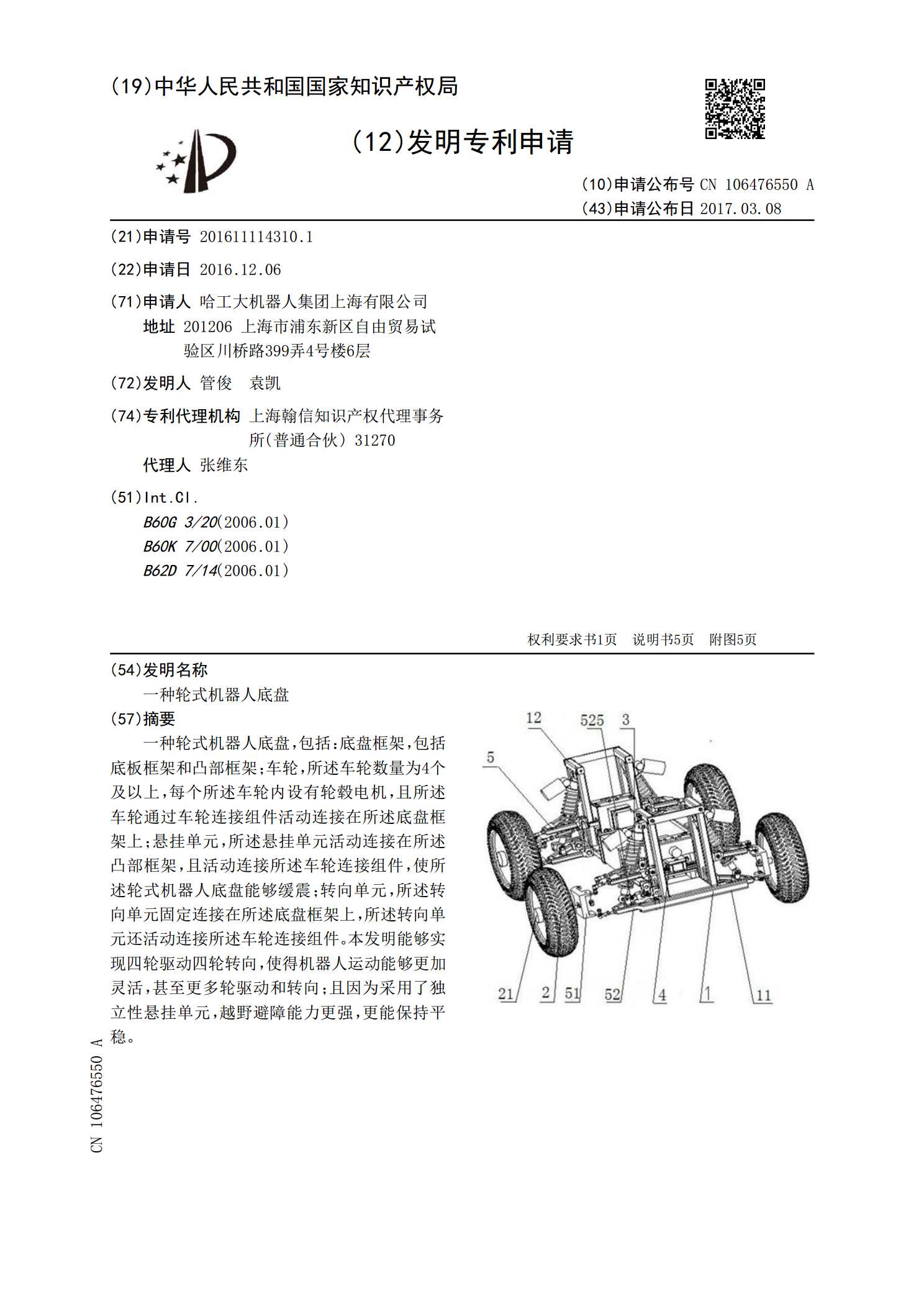
一种轮式机器人底盘,包括:底盘框架,包括底板框架和凸部框架;车轮,所述车轮数量为4个及以上,每个所述车轮内设有轮毂电机,且所述车轮通过车轮连接组件活动连接在所述底盘框架上;悬挂单元,所述悬挂单元活动连接在所述凸部框架,且活动连接所述车轮连接组件,使所述轮式机器人底盘能够缓震;转向单元,所述转向单元固定连接在所述底盘框架上,所述转向单元还活动连接所述车轮连接组件。本发明能够实现四轮驱动四轮转向,使得机器人运动能够更加灵活,甚至更多轮驱动和转向;且因为采用了独立性悬挂单元,越野避障能力更强,更能保持平稳。