
用于确定车速参数的方法.pdf

Ja****23

1/10
2/10
3/10
4/10
5/10
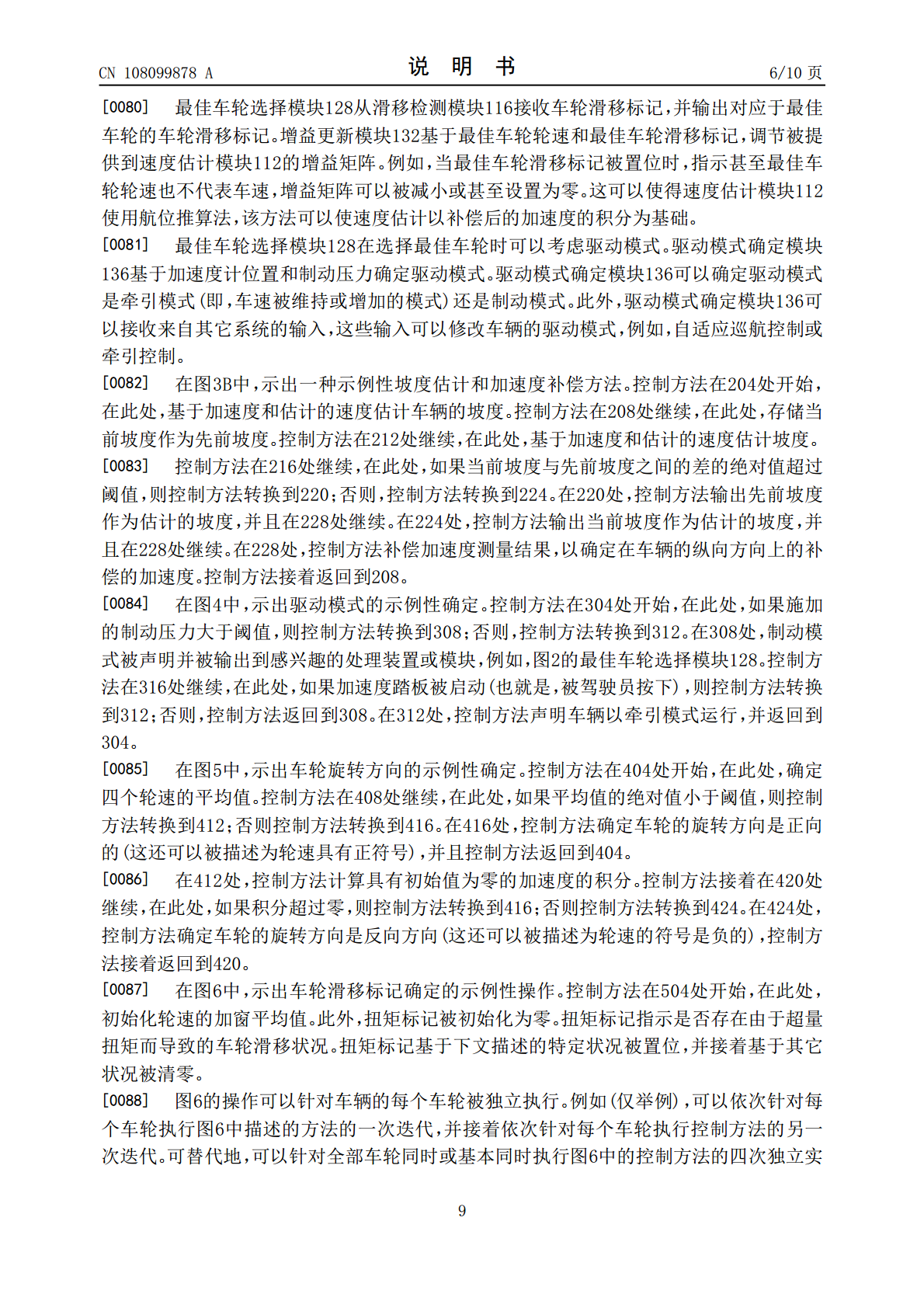
6/10
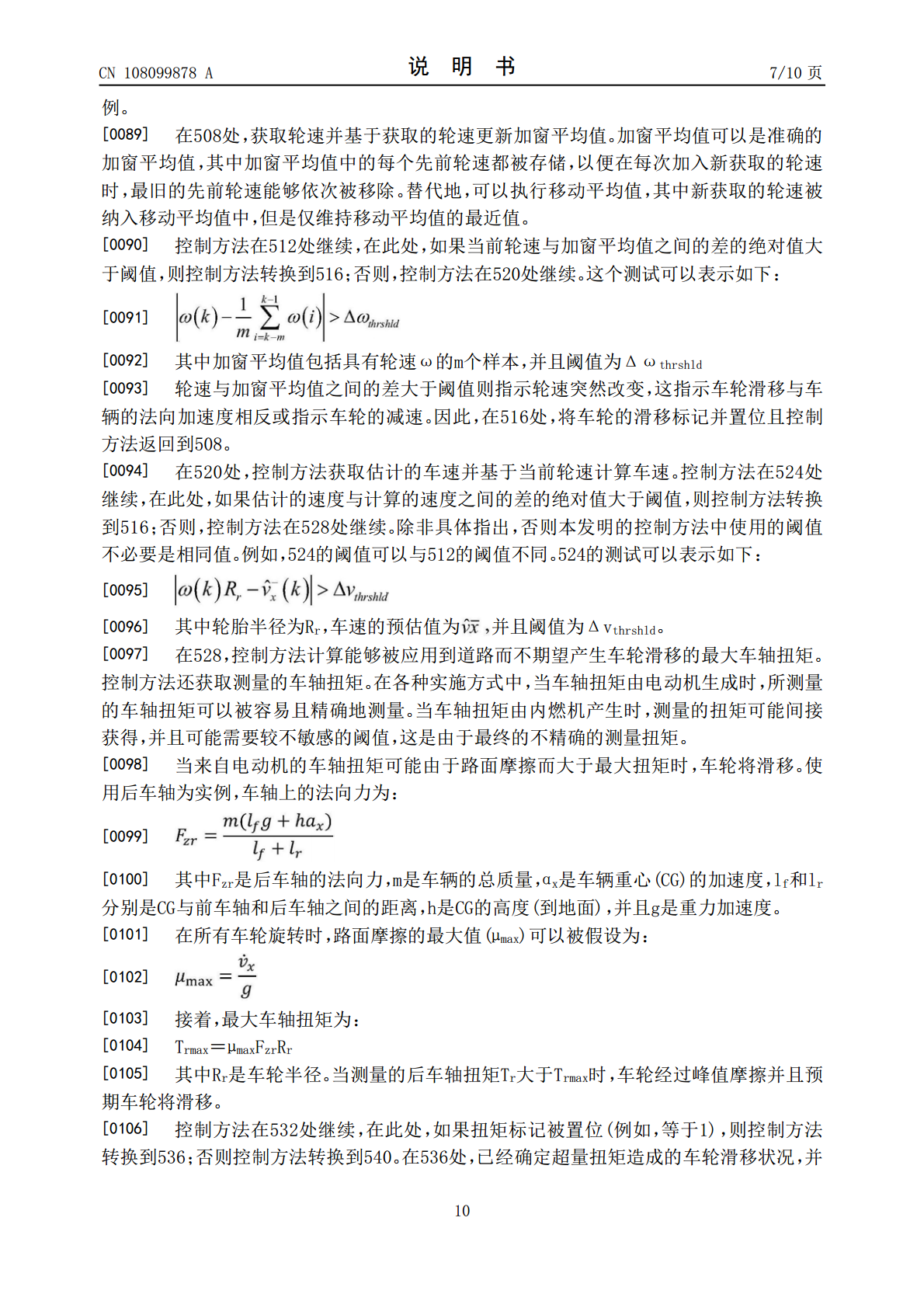
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于确定车速参数的方法.pdf
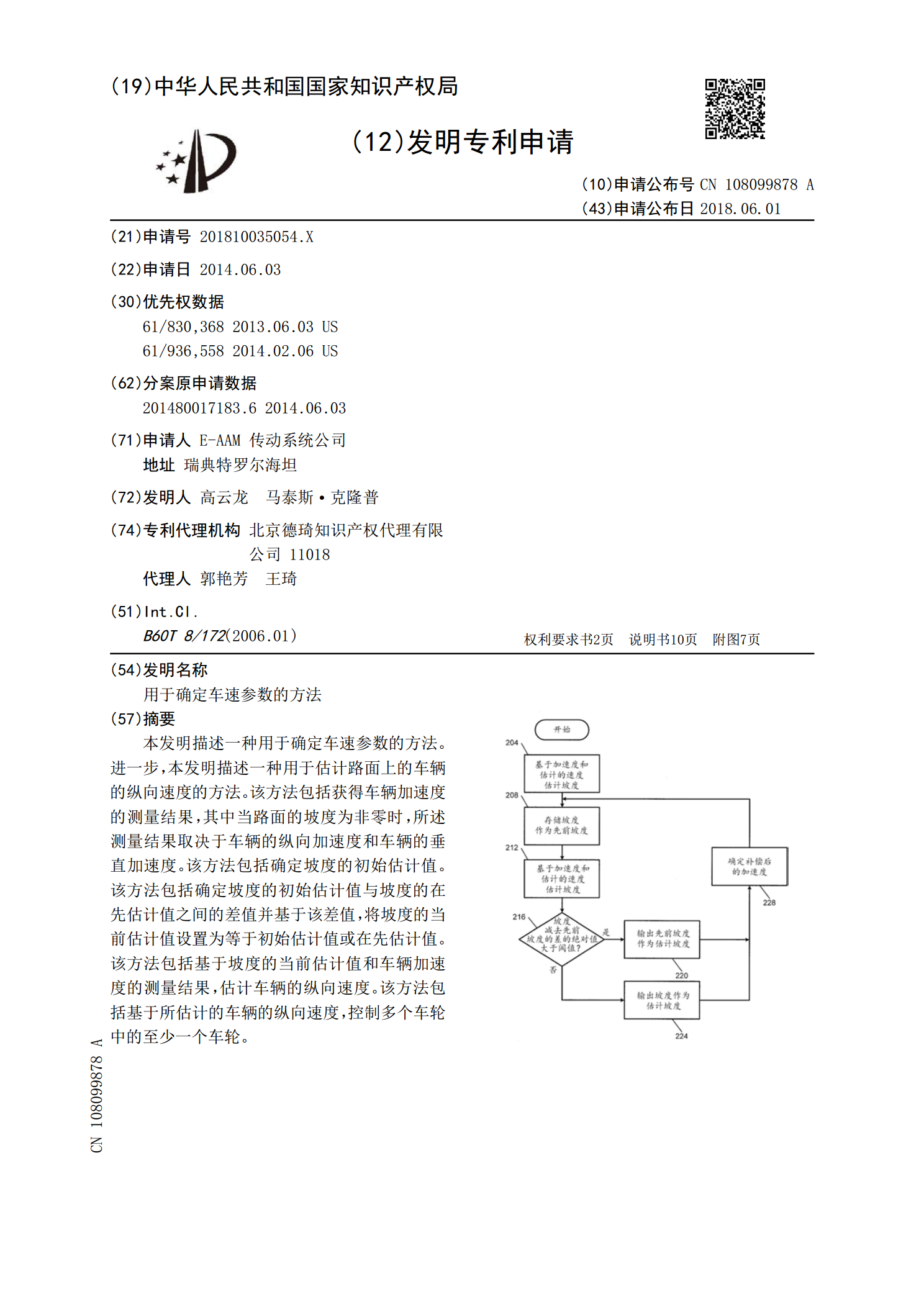
本发明描述一种用于确定车速参数的方法。进一步,本发明描述一种用于估计路面上的车辆的纵向速度的方法。该方法包括获得车辆加速度的测量结果,其中当路面的坡度为非零时,所述测量结果取决于车辆的纵向加速度和车辆的垂直加速度。该方法包括确定坡度的初始估计值。该方法包括确定坡度的初始估计值与坡度的在先估计值之间的差值并基于该差值,将坡度的当前估计值设置为等于初始估计值或在先估计值。该方法包括基于坡度的当前估计值和车辆加速度的测量结果,估计车辆的纵向速度。该方法包括基于所估计的车辆的纵向速度,控制多个车轮中的至少一个车轮
用于确定车轮定位参数的方法.pdf
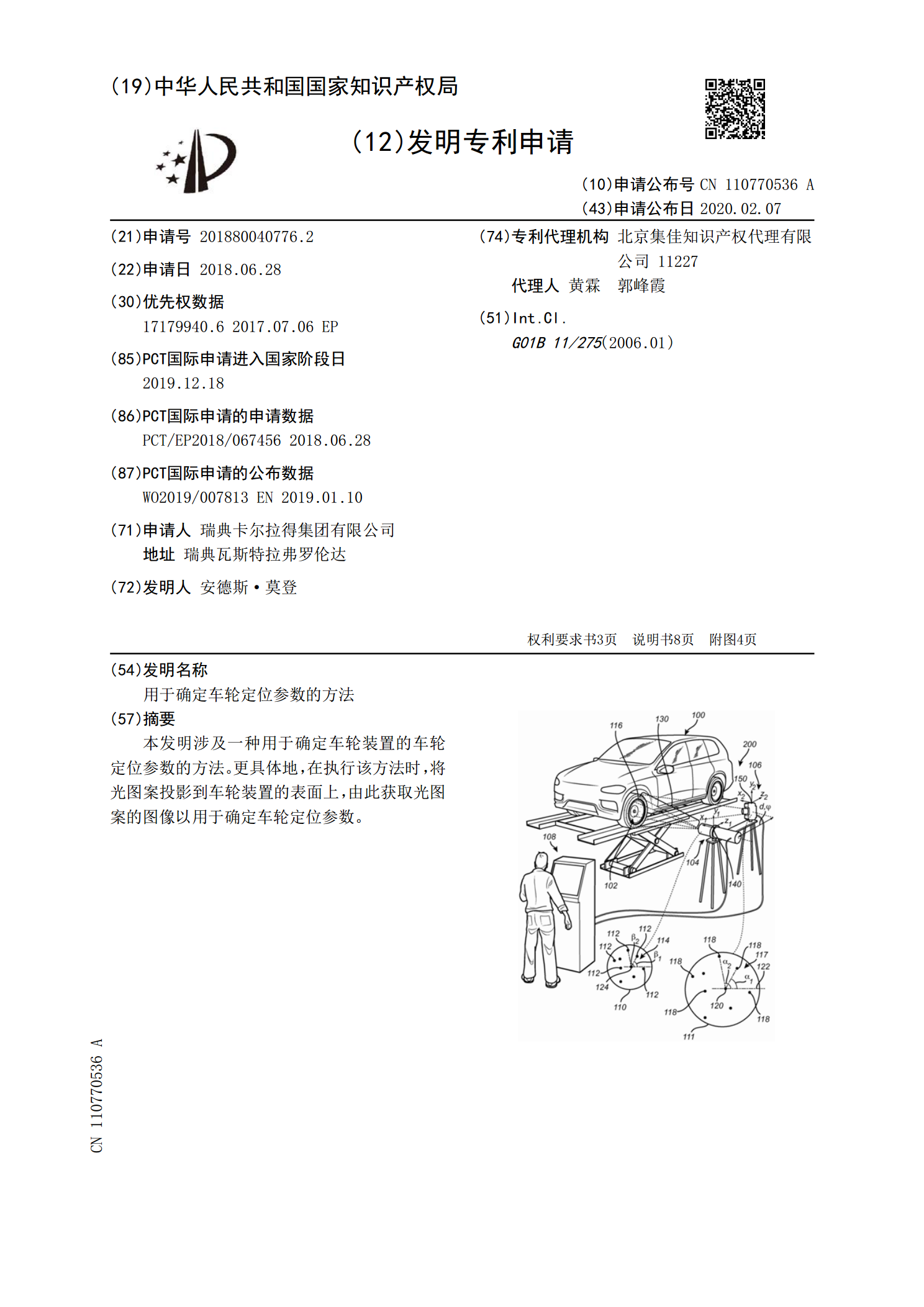
本发明涉及一种用于确定车轮装置的车轮定位参数的方法。更具体地,在执行该方法时,将光图案投影到车轮装置的表面上,由此获取光图案的图像以用于确定车轮定位参数。
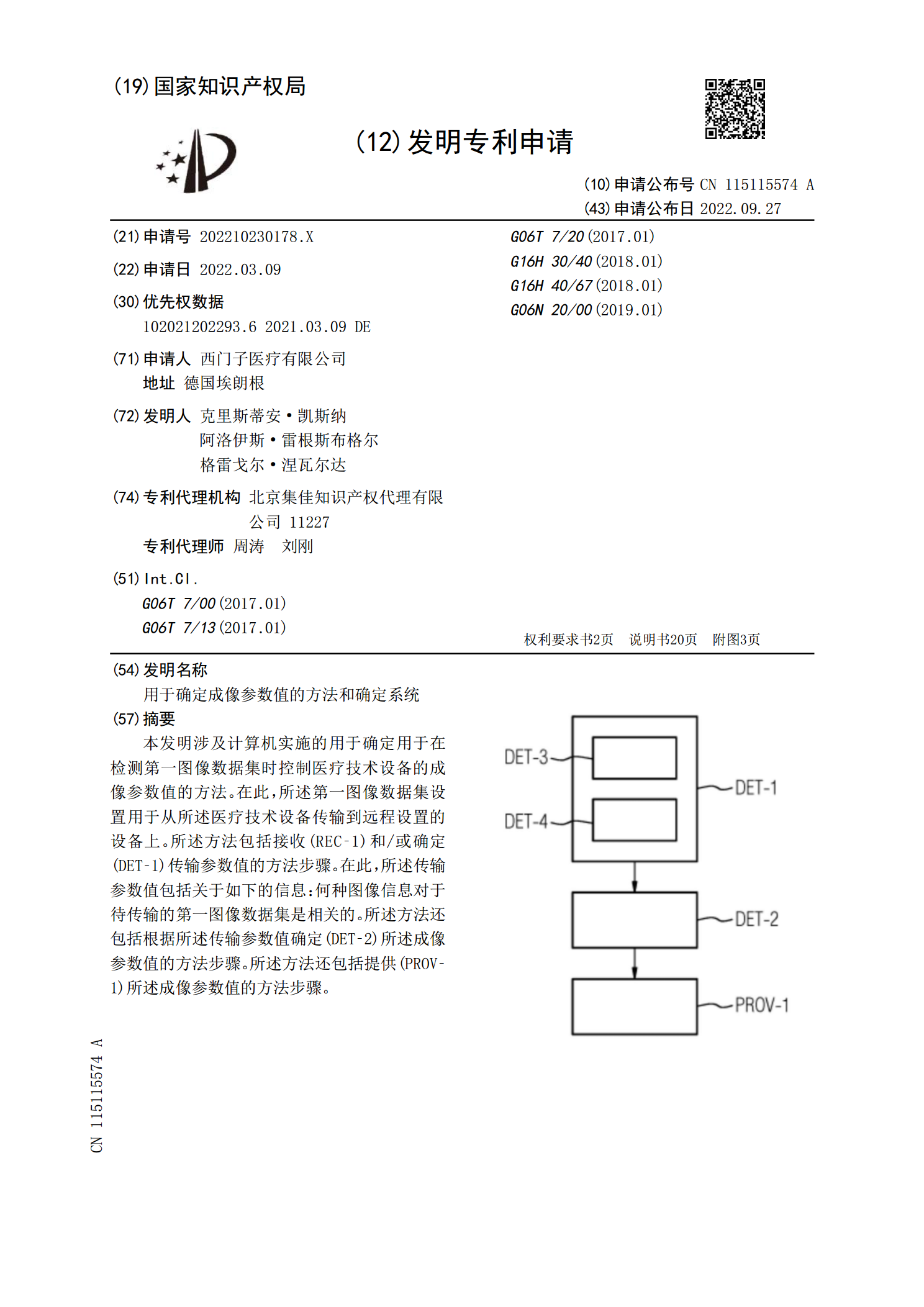
用于确定成像参数值的方法和确定系统.pdf
本发明涉及计算机实施的用于确定用于在检测第一图像数据集时控制医疗技术设备的成像参数值的方法。在此,所述第一图像数据集设置用于从所述医疗技术设备传输到远程设置的设备上。所述方法包括接收(REC?1)和/或确定(DET?1)传输参数值的方法步骤。在此,所述传输参数值包括关于如下的信息:何种图像信息对于待传输的第一图像数据集是相关的。所述方法还包括根据所述传输参数值确定(DET?2)所述成像参数值的方法步骤。所述方法还包括提供(PROV?1)所述成像参数值的方法步骤。
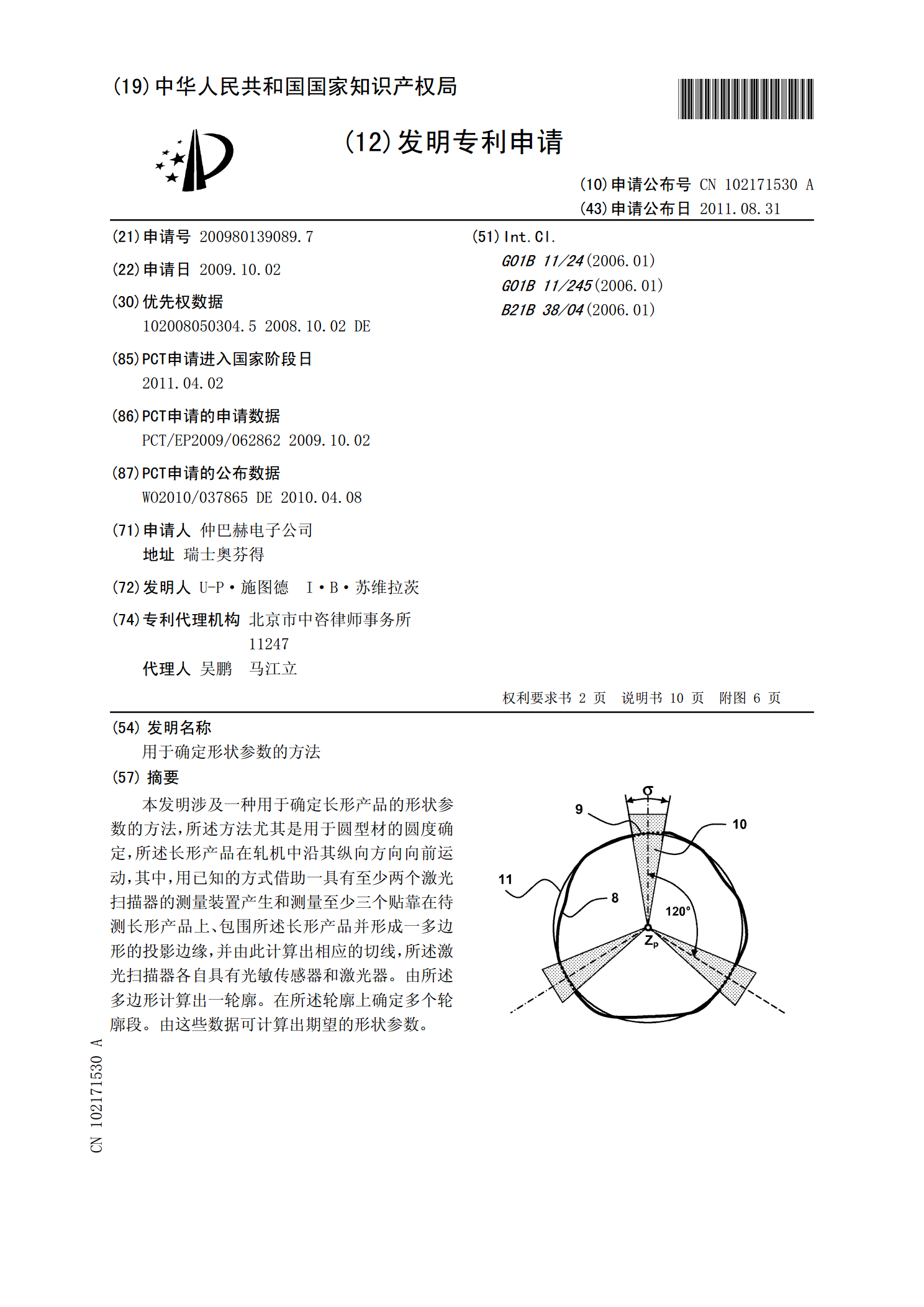
用于确定形状参数的方法.pdf
本发明涉及一种用于确定长形产品的形状参数的方法,所述方法尤其是用于圆型材的圆度确定,所述长形产品在轧机中沿其纵向方向向前运动,其中,用已知的方式借助一具有至少两个激光扫描器的测量装置产生和测量至少三个贴靠在待测长形产品上、包围所述长形产品并形成一多边形的投影边缘,并由此计算出相应的切线,所述激光扫描器各自具有光敏传感器和激光器。由所述多边形计算出一轮廓。在所述轮廓上确定多个轮廓段。由这些数据可计算出期望的形状参数。
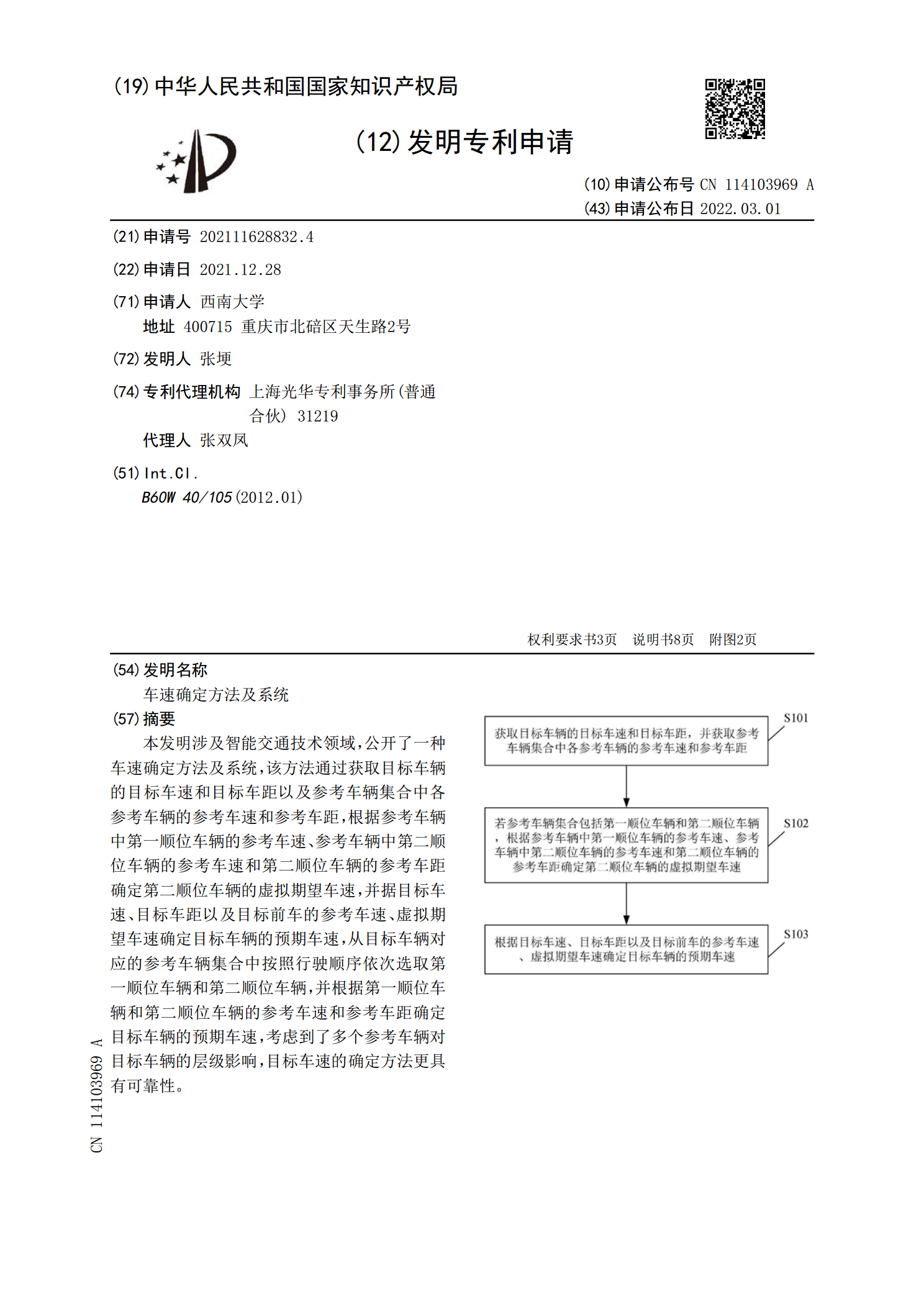
车速确定方法及系统.pdf
本发明涉及智能交通技术领域,公开了一种车速确定方法及系统,该方法通过获取目标车辆的目标车速和目标车距以及参考车辆集合中各参考车辆的参考车速和参考车距,根据参考车辆中第一顺位车辆的参考车速、参考车辆中第二顺位车辆的参考车速和第二顺位车辆的参考车距确定第二顺位车辆的虚拟期望车速,并据目标车速、目标车距以及目标前车的参考车速、虚拟期望车速确定目标车辆的预期车速,从目标车辆对应的参考车辆集合中按照行驶顺序依次选取第一顺位车辆和第二顺位车辆,并根据第一顺位车辆和第二顺位车辆的参考车速和参考车距确定目标车辆的预期车速