
多地形多功能作战机器人.pdf

An****99

1/7

2/7
3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多地形多功能作战机器人.pdf
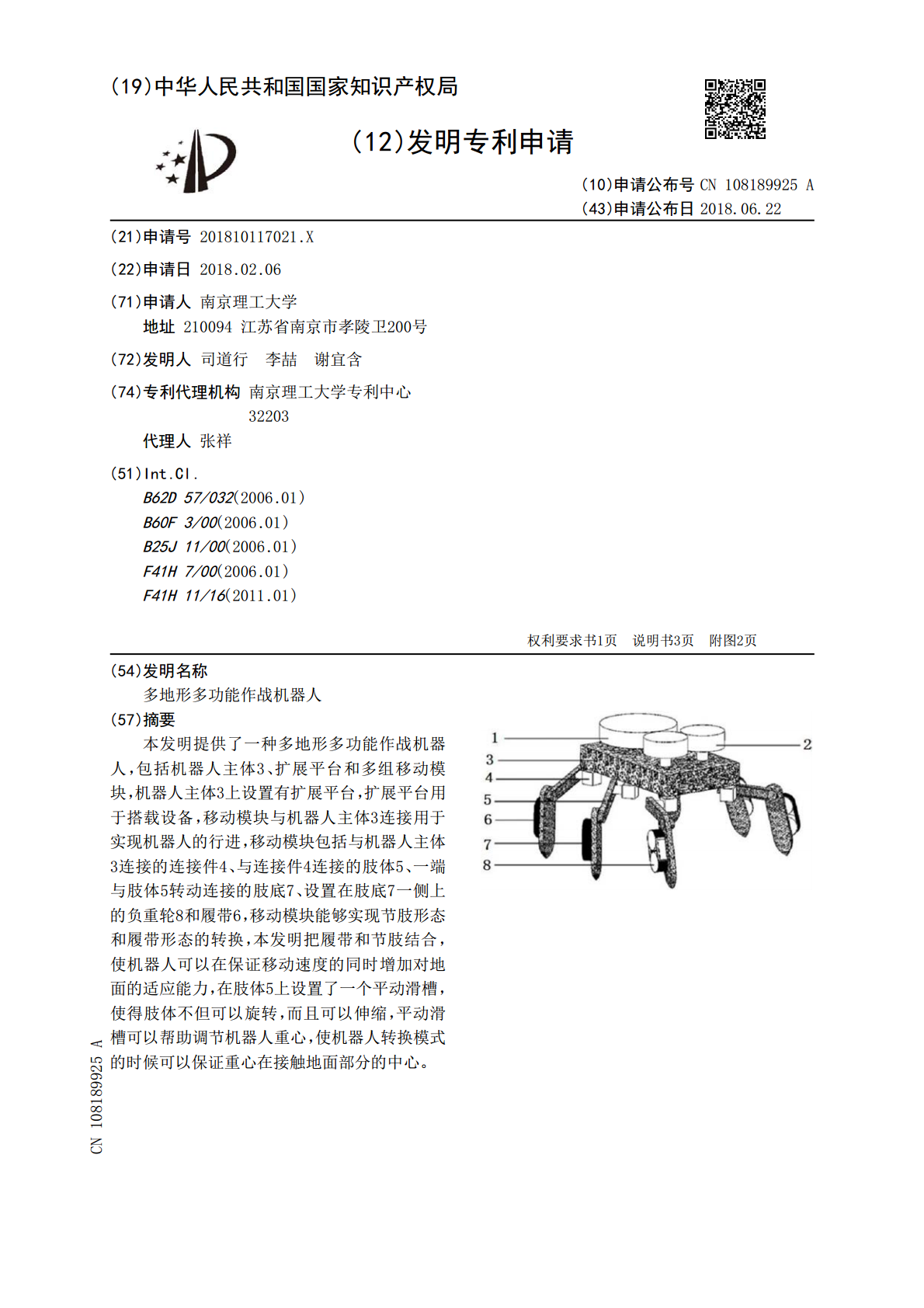
本发明提供了一种多地形多功能作战机器人,包括机器人主体3、扩展平台和多组移动模块,机器人主体3上设置有扩展平台,扩展平台用于搭载设备,移动模块与机器人主体3连接用于实现机器人的行进,移动模块包括与机器人主体3连接的连接件4、与连接件4连接的肢体5、一端与肢体5转动连接的肢底7、设置在肢底7一侧上的负重轮8和履带6,移动模块能够实现节肢形态和履带形态的转换,本发明把履带和节肢结合,使机器人可以在保证移动速度的同时增加对地面的适应能力,在肢体5上设置了一个平动滑槽,使得肢体不但可以旋转,而且可以伸缩,平动滑槽
地形对作战行动的影响.pptx
第三章地形对作战行动的影响第一节地形要素对作战行动的影响一、地貌与土质对作战行动旳影响1.山顶:形态高突,展望良好,是选择观察所旳理想位置;因为对四面具有瞰制作用,若位居要冲,常被选为地形要点;形状、颜色特殊旳山顶,是指示目旳旳良好方位物,高大透空旳山顶,是夜间行进可利用旳目旳。4.山谷:地势低凹,利于部队隐蔽、伪装和防护,但若施放毒剂,则滞留时间长。声音顺谷方向传播旳快而远,但翻山旳横向传播则很差。战时可实施隐蔽机动、选做炮兵阵地。6.斜面:斜面形状,影响堑壕旳挖掘位置和火器配置。等齐斜面,在防界线附近
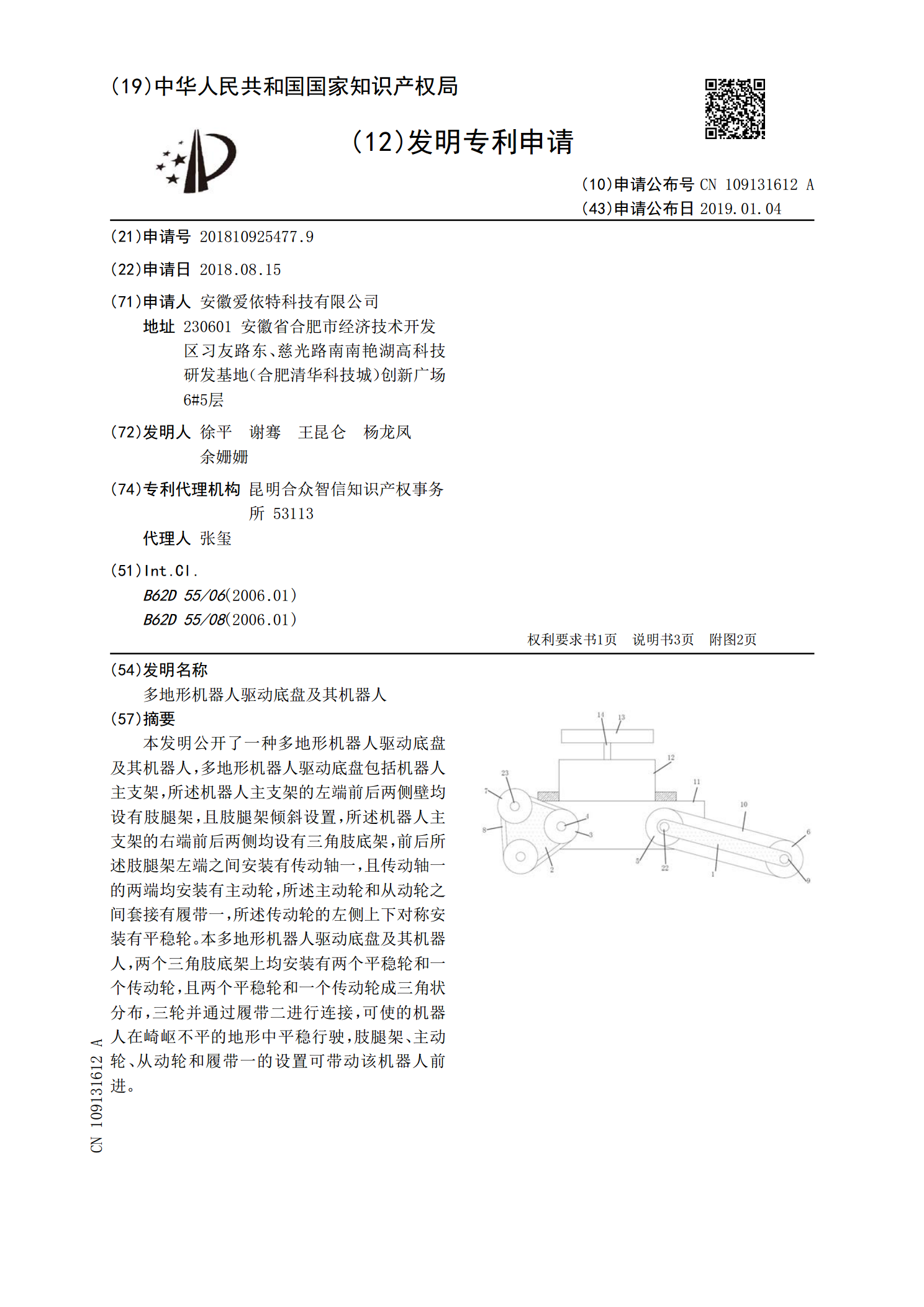
多地形机器人驱动底盘及其机器人.pdf
本发明公开了一种多地形机器人驱动底盘及其机器人,多地形机器人驱动底盘包括机器人主支架,所述机器人主支架的左端前后两侧壁均设有肢腿架,且肢腿架倾斜设置,所述机器人主支架的右端前后两侧均设有三角肢底架,前后所述肢腿架左端之间安装有传动轴一,且传动轴一的两端均安装有主动轮,所述主动轮和从动轮之间套接有履带一,所述传动轮的左侧上下对称安装有平稳轮。本多地形机器人驱动底盘及其机器人,两个三角肢底架上均安装有两个平稳轮和一个传动轮,且两个平稳轮和一个传动轮成三角状分布,三轮并通过履带二进行连接,可使的机器人在崎岖不平

多地形垃圾回收分类机器人.pdf
本发明公开了多地形垃圾回收分类机器人,包括底座,底座顶部固定连接有安装架,安装架顶部设置有调节夹持机构,底座一侧设置有移动机构;调节夹持机构包括旋转底座、第一数字舵机、第二数字舵机、第三数字舵机、第四数字舵机、机械夹爪、第一连接臂、第二连接臂和支撑架,旋转底座固定安装在安装架顶部,第一数字舵机固定安装在旋转底座顶部,第一连接臂一端固定连接在第一数字舵机连接端;本发明提供的技术方案中,通过数字舵机运行可以带动第一连接臂、第二连接臂和支撑架移动,从而调节机械夹爪移动,多个数字舵机形成的多关节结构使机械夹爪更为
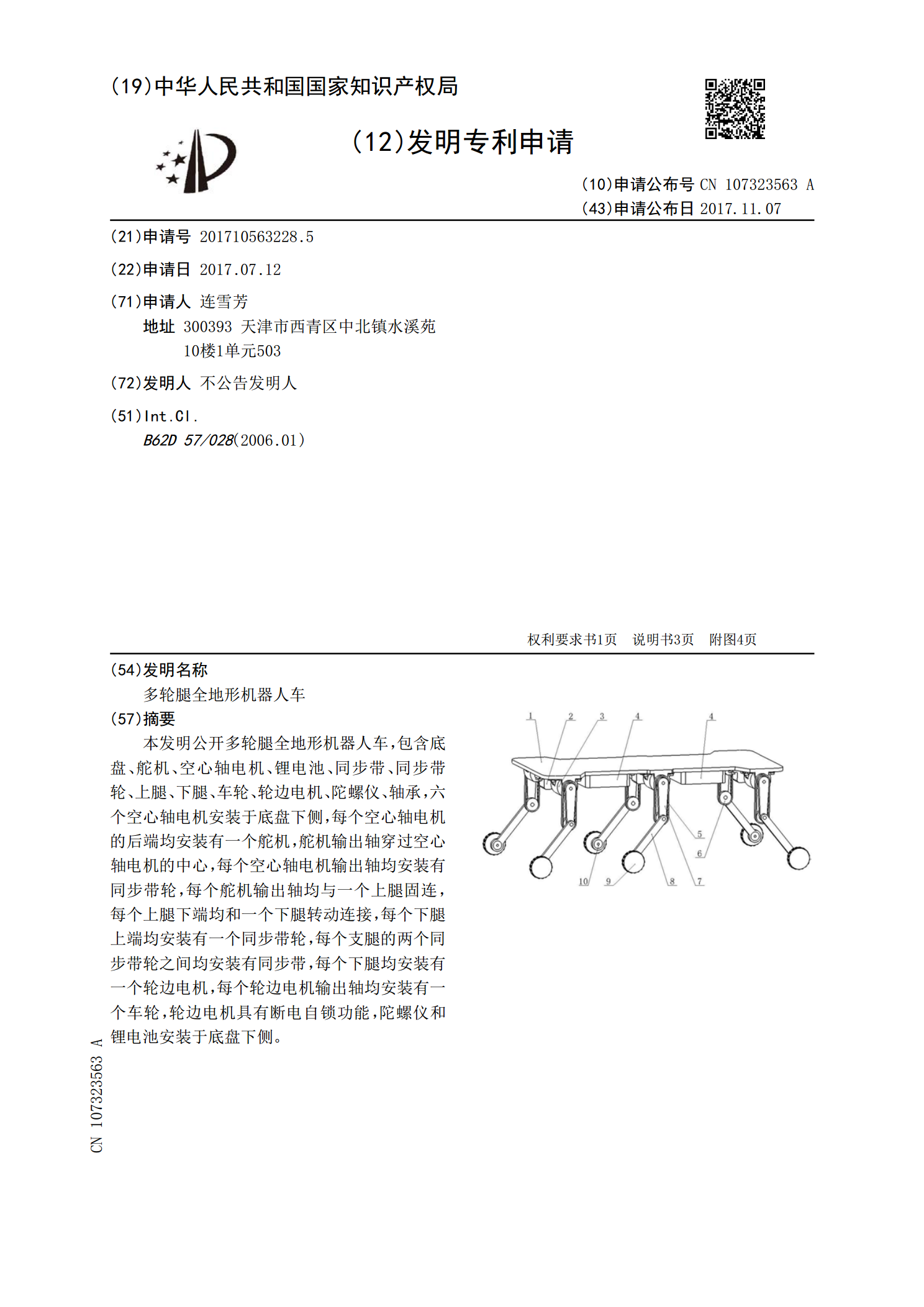
多轮腿全地形机器人车.pdf
本发明公开多轮腿全地形机器人车,包含底盘、舵机、空心轴电机、锂电池、同步带、同步带轮、上腿、下腿、车轮、轮边电机、陀螺仪、轴承,六个空心轴电机安装于底盘下侧,每个空心轴电机的后端均安装有一个舵机,舵机输出轴穿过空心轴电机的中心,每个空心轴电机输出轴均安装有同步带轮,每个舵机输出轴均与一个上腿固连,每个上腿下端均和一个下腿转动连接,每个下腿上端均安装有一个同步带轮,每个支腿的两个同步带轮之间均安装有同步带,每个下腿均安装有一个轮边电机,每个轮边电机输出轴均安装有一个车轮,轮边电机具有断电自锁功能,陀螺仪和锂