
多地形垃圾回收分类机器人.pdf

一条****丹淑

1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多地形垃圾回收分类机器人.pdf
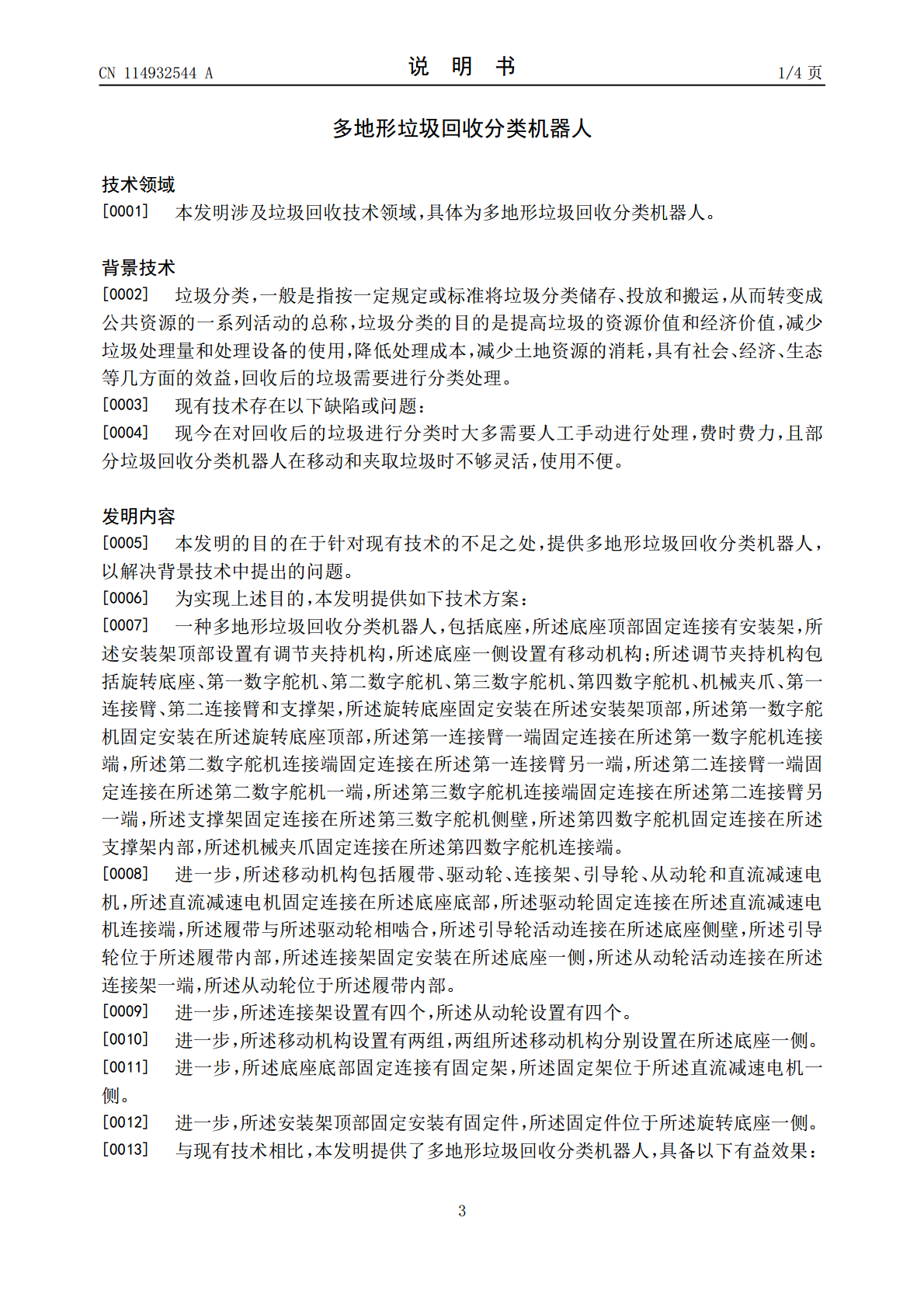
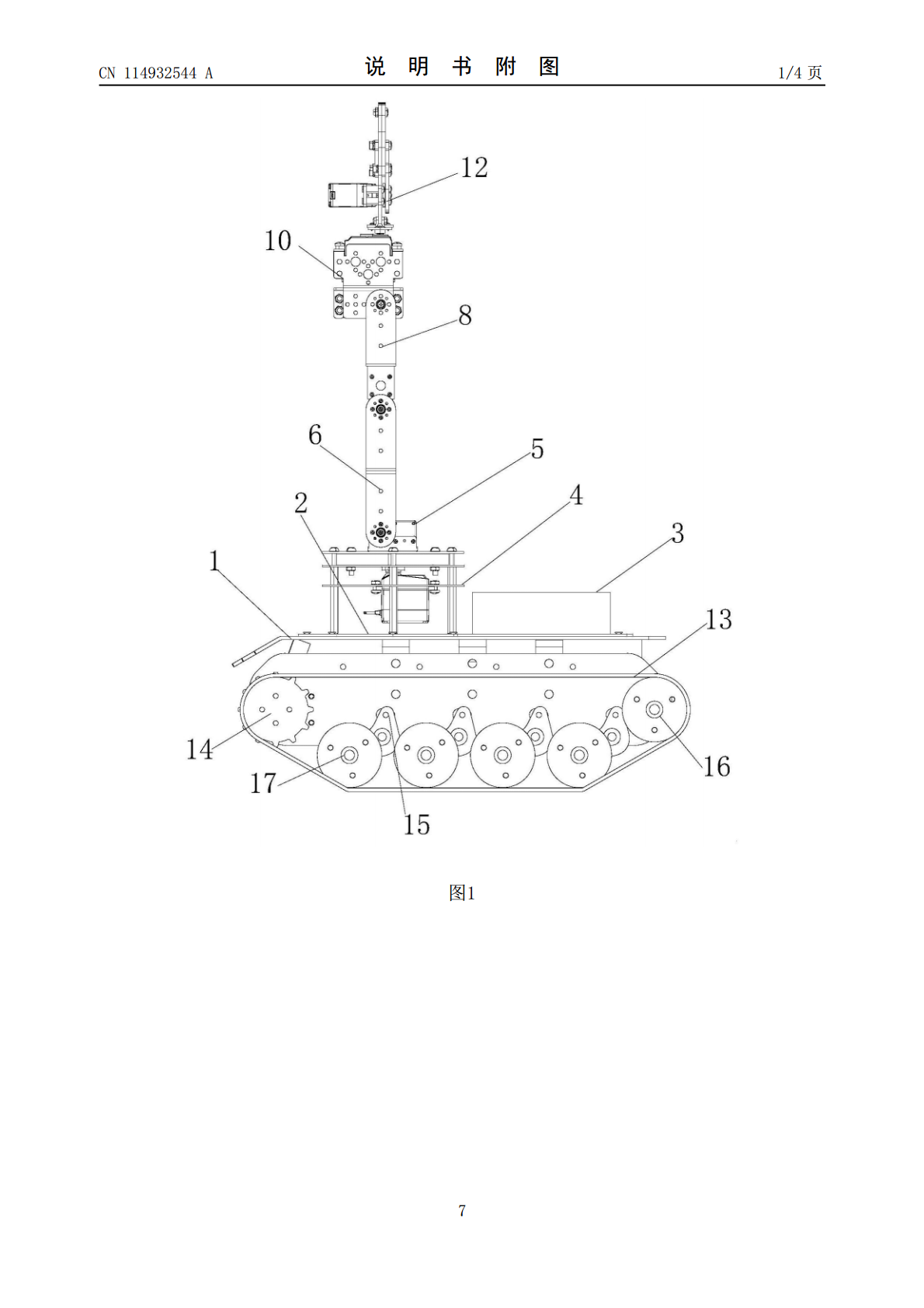
本发明公开了多地形垃圾回收分类机器人,包括底座,底座顶部固定连接有安装架,安装架顶部设置有调节夹持机构,底座一侧设置有移动机构;调节夹持机构包括旋转底座、第一数字舵机、第二数字舵机、第三数字舵机、第四数字舵机、机械夹爪、第一连接臂、第二连接臂和支撑架,旋转底座固定安装在安装架顶部,第一数字舵机固定安装在旋转底座顶部,第一连接臂一端固定连接在第一数字舵机连接端;本发明提供的技术方案中,通过数字舵机运行可以带动第一连接臂、第二连接臂和支撑架移动,从而调节机械夹爪移动,多个数字舵机形成的多关节结构使机械夹爪更为
垃圾分类回收机器人.pdf
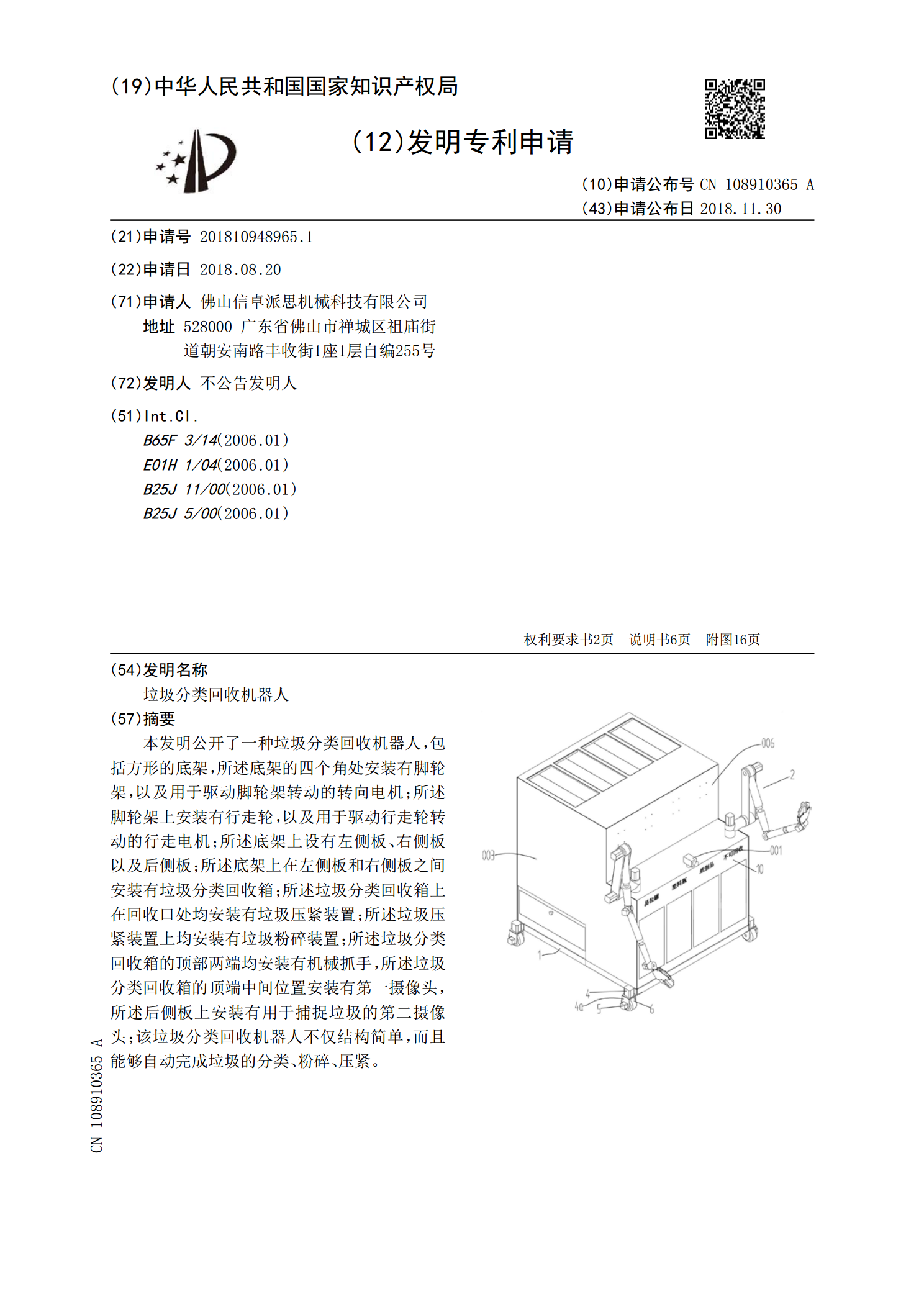
本发明公开了一种垃圾分类回收机器人,包括方形的底架,所述底架的四个角处安装有脚轮架,以及用于驱动脚轮架转动的转向电机;所述脚轮架上安装有行走轮,以及用于驱动行走轮转动的行走电机;所述底架上设有左侧板、右侧板以及后侧板;所述底架上在左侧板和右侧板之间安装有垃圾分类回收箱;所述垃圾分类回收箱上在回收口处均安装有垃圾压紧装置;所述垃圾压紧装置上均安装有垃圾粉碎装置;所述垃圾分类回收箱的顶部两端均安装有机械抓手,所述垃圾分类回收箱的顶端中间位置安装有第一摄像头,所述后侧板上安装有用于捕捉垃圾的第二摄像头;该垃圾分

垃圾分类回收好处多活动设计.doc
.精选范本《垃圾分类回收好处多》活动背景二、活动目标(一)知识与技能:1、通过活动,使学生了解垃圾的危害、分类的必要、处理垃圾方法。(二)过程与方法:1、通过活动,增强学生动手实践能力和参与社会生活的意识。2、让学生观察周围环境,说出环境的变化,并了解当今社会人们是如何处理垃圾的。(三)情感、态度与价值观:感受垃圾给人们带来的危害,增强学生的环保意识。三、活动准备1、学生对垃圾的分类进行调查。2、学生对垃圾的危害、处理的方法进行整理,查找。3、学生的“变废为宝”的作品展示。四、活动过程调查一:垃圾的危害1
一种垃圾分类回收机器人.pdf
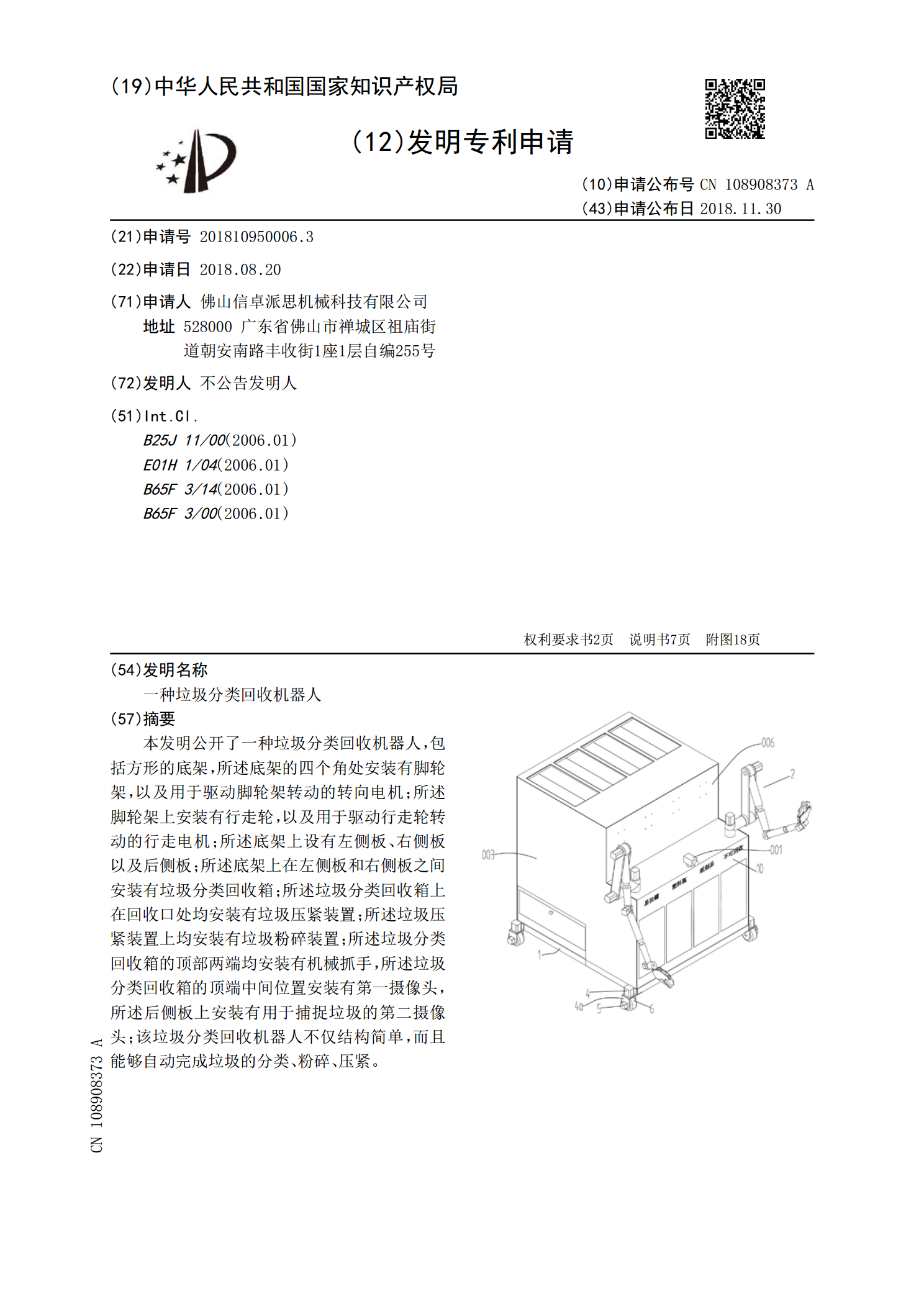
本发明公开了一种垃圾分类回收机器人,包括方形的底架,所述底架的四个角处安装有脚轮架,以及用于驱动脚轮架转动的转向电机;所述脚轮架上安装有行走轮,以及用于驱动行走轮转动的行走电机;所述底架上设有左侧板、右侧板以及后侧板;所述底架上在左侧板和右侧板之间安装有垃圾分类回收箱;所述垃圾分类回收箱上在回收口处均安装有垃圾压紧装置;所述垃圾压紧装置上均安装有垃圾粉碎装置;所述垃圾分类回收箱的顶部两端均安装有机械抓手,所述垃圾分类回收箱的顶端中间位置安装有第一摄像头,所述后侧板上安装有用于捕捉垃圾的第二摄像头;该垃圾分

垃圾分类回收论文垃圾回收论文.doc
谈小学生分类投放\回收垃圾的习惯养成[摘要]环境保护问题日益受到公众的关注。教师、家长应注重孩子的道德认知,注重引导孩子参与“给垃圾找家”的实践体验活动,指导孩子体验将可回收垃圾送往废品收购站,提高用废品换钱的活动乐趣,让孩子在生活中养成分类投放、回收垃圾的文明习惯。[关键词]环境保护垃圾处理习惯养成随着社会的发展进步,珍惜资源、减少污染等环境保护问题日益受到公众的关注。人们若能正确地将垃圾分类投放,回收、加工再利用,地球上有限的自然资源就能得到有效节约,自然环境就能得到保护