
多轮腿全地形机器人车.pdf

东耀****哥哥

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多轮腿全地形机器人车.pdf
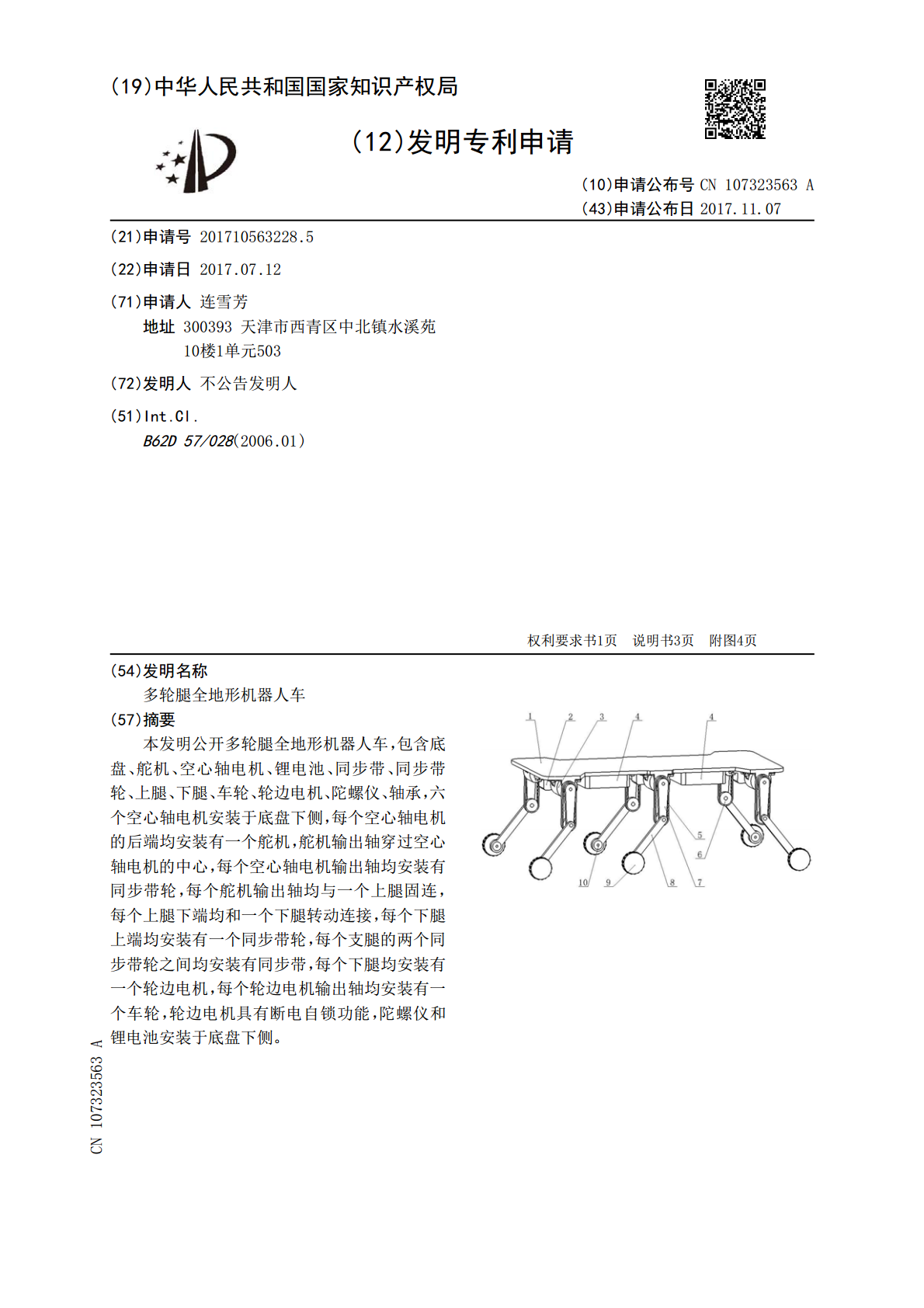
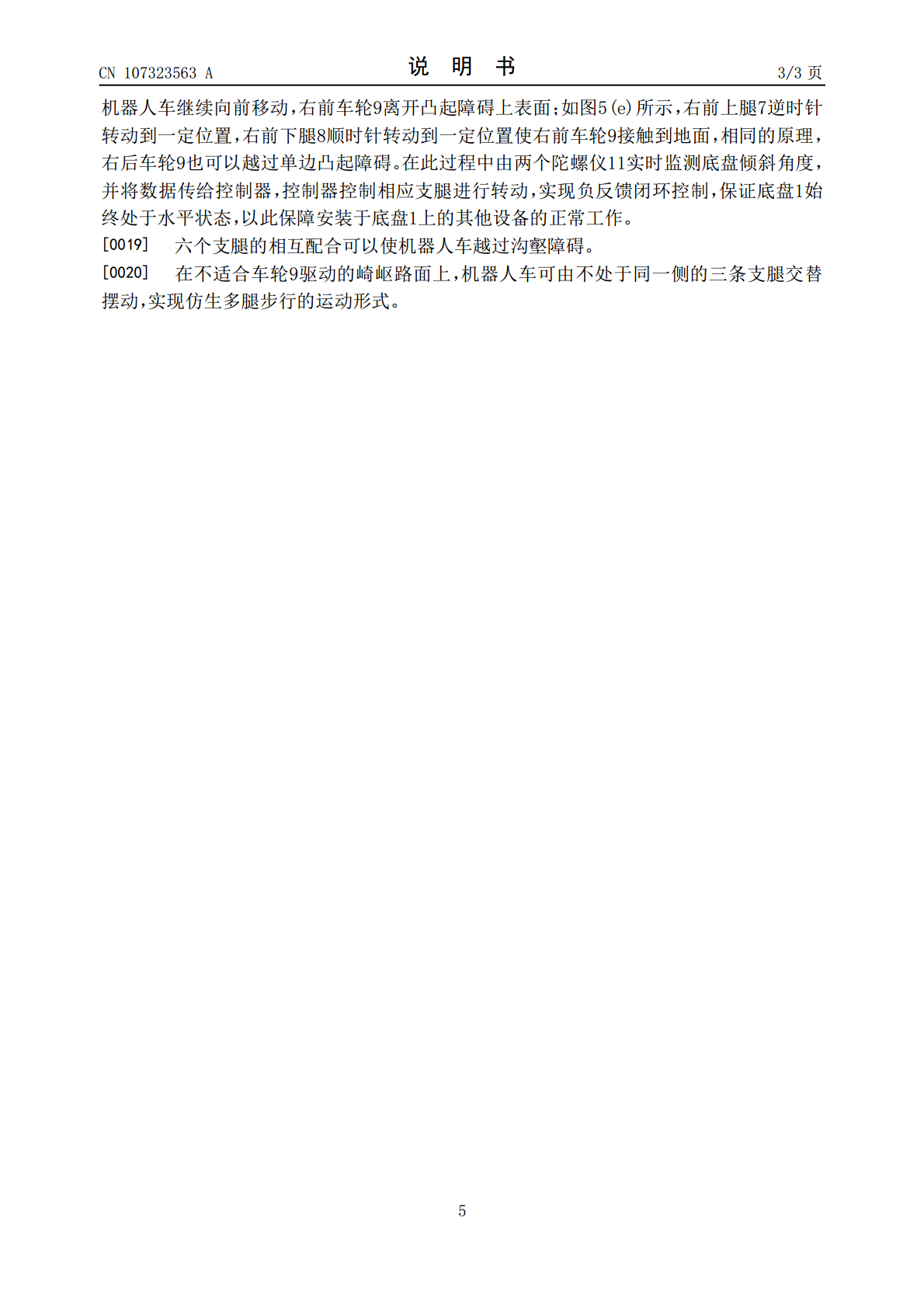
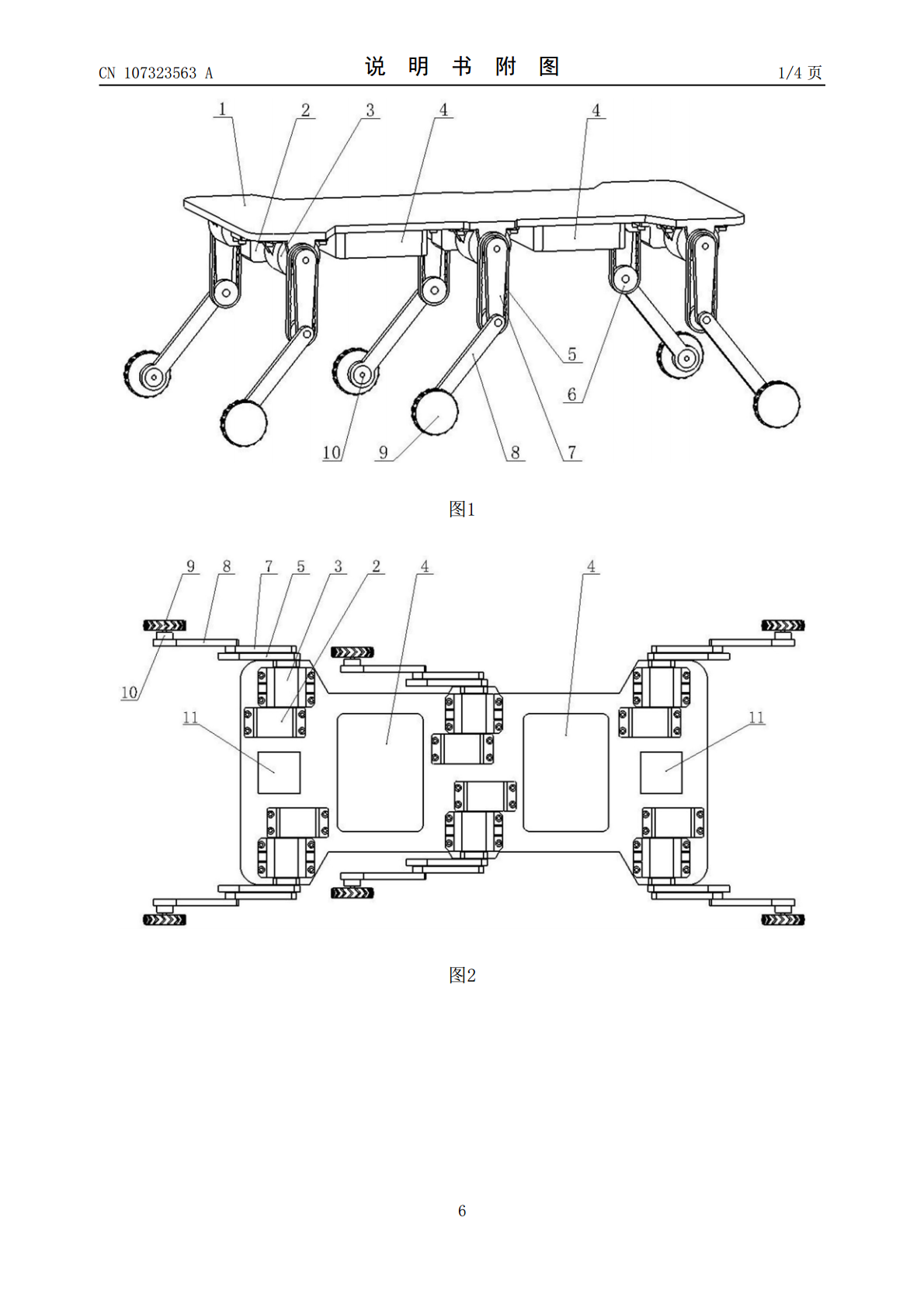
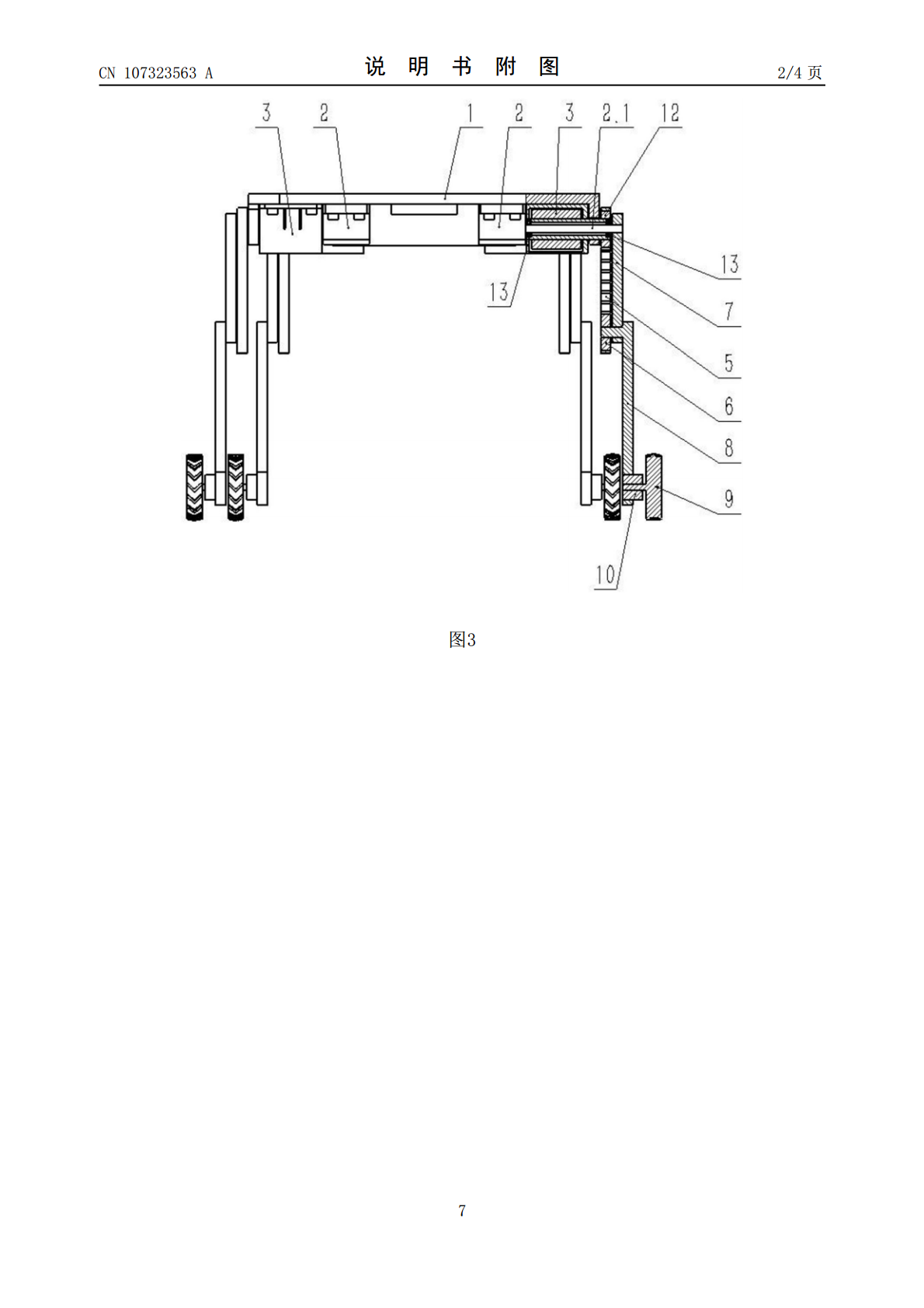
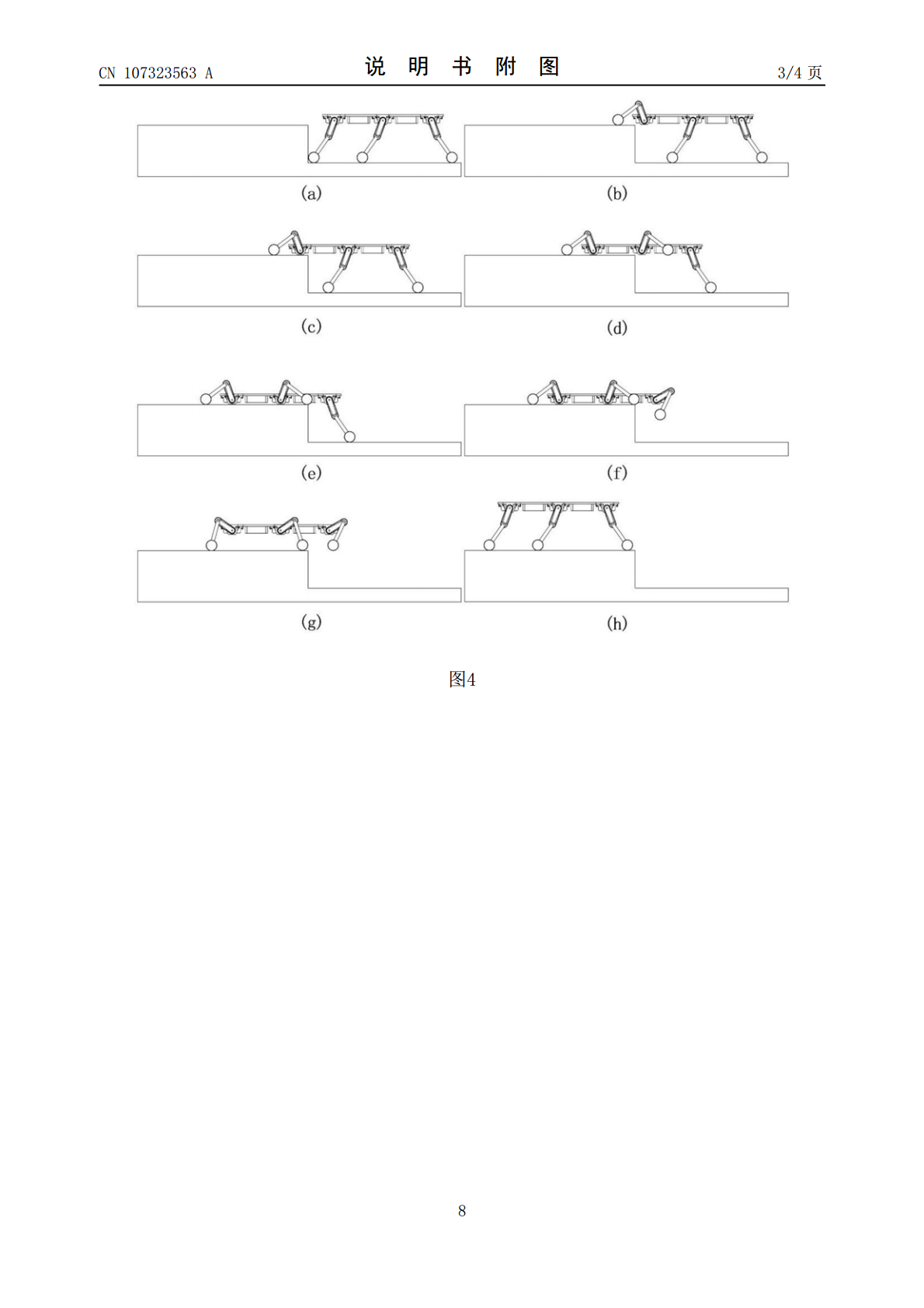
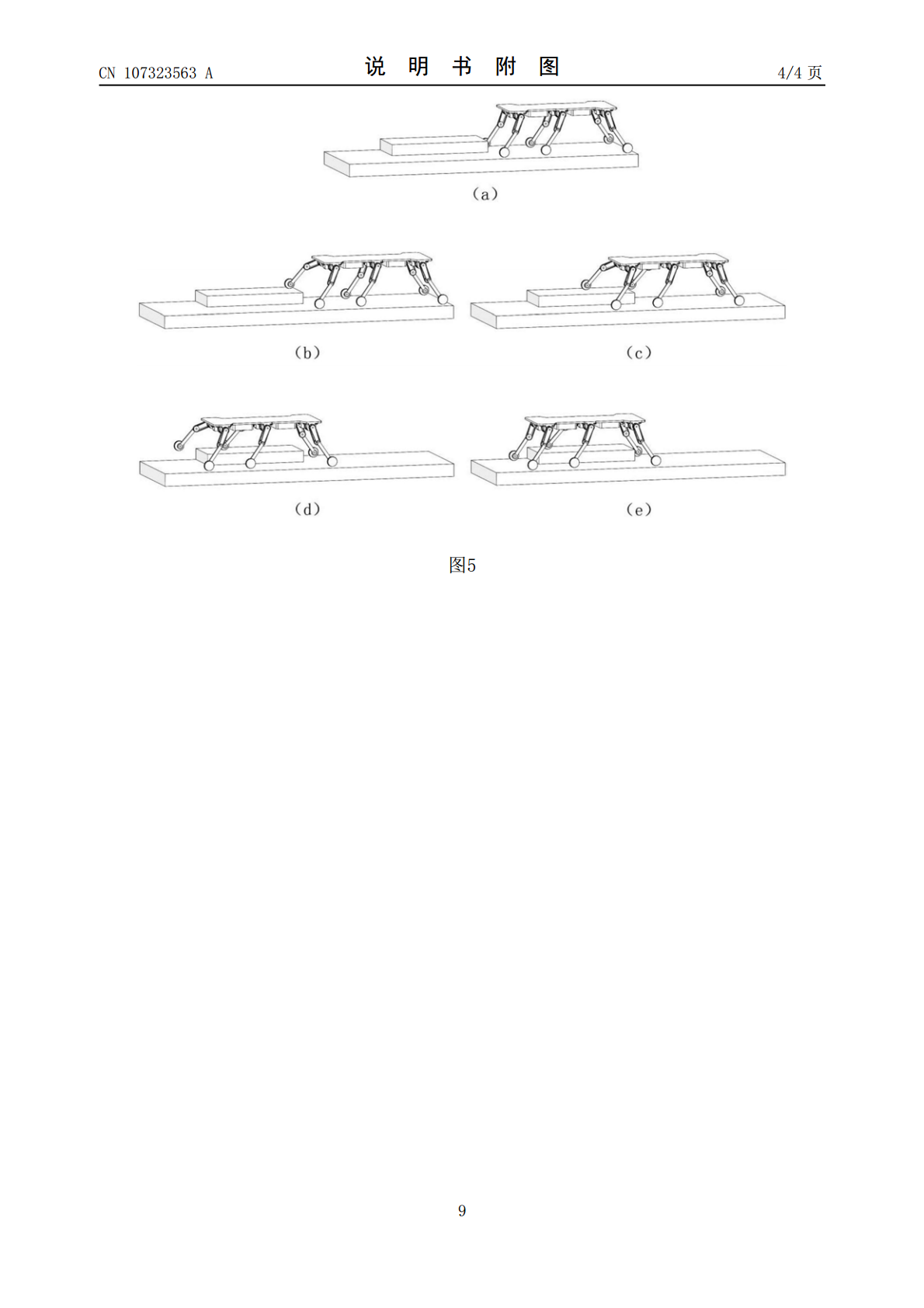
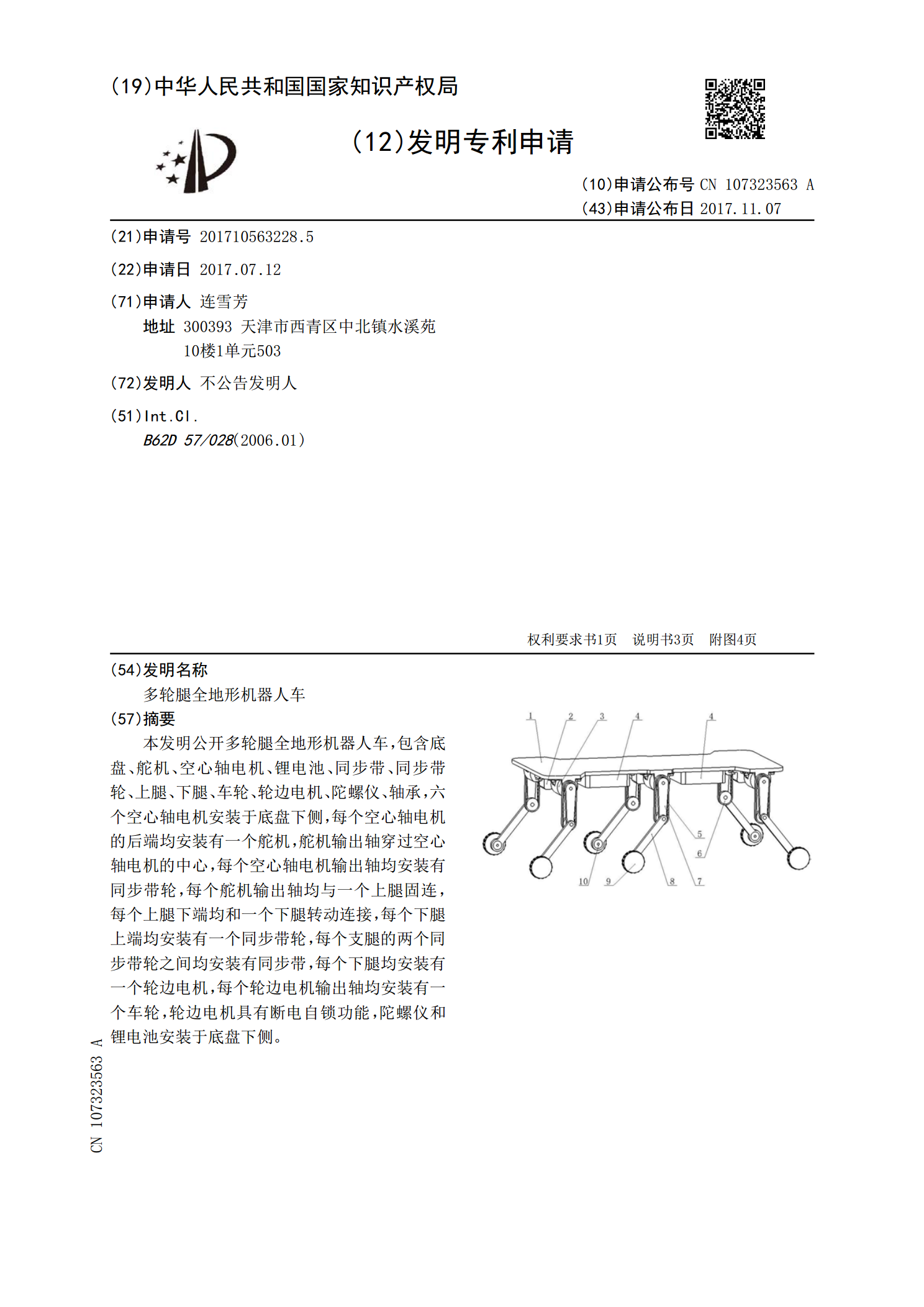
本发明公开多轮腿全地形机器人车,包含底盘、舵机、空心轴电机、锂电池、同步带、同步带轮、上腿、下腿、车轮、轮边电机、陀螺仪、轴承,六个空心轴电机安装于底盘下侧,每个空心轴电机的后端均安装有一个舵机,舵机输出轴穿过空心轴电机的中心,每个空心轴电机输出轴均安装有同步带轮,每个舵机输出轴均与一个上腿固连,每个上腿下端均和一个下腿转动连接,每个下腿上端均安装有一个同步带轮,每个支腿的两个同步带轮之间均安装有同步带,每个下腿均安装有一个轮边电机,每个轮边电机输出轴均安装有一个车轮,轮边电机具有断电自锁功能,陀螺仪和锂
一种轮腿式全地形车.pdf
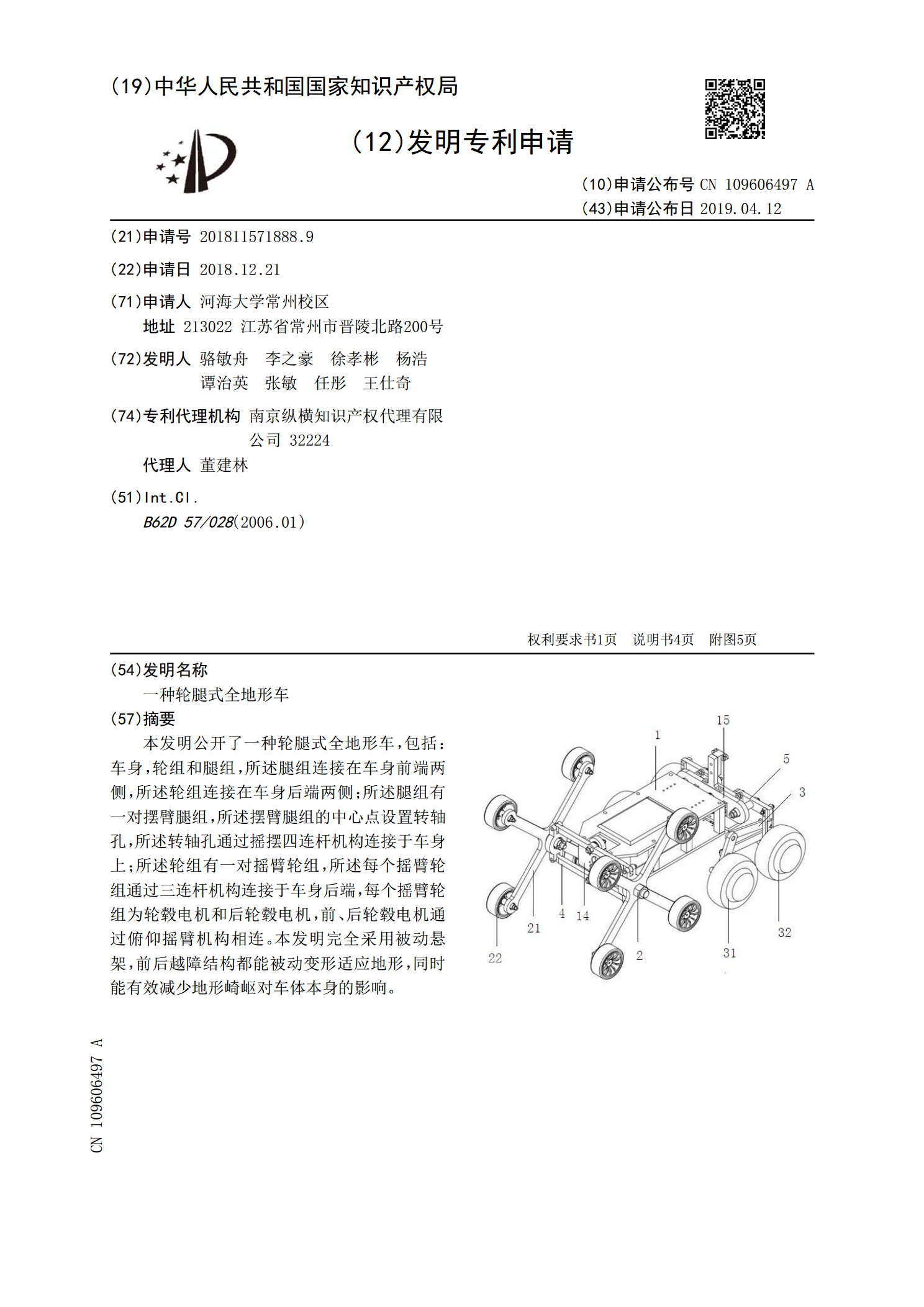
本发明公开了一种轮腿式全地形车,包括:车身,轮组和腿组,所述腿组连接在车身前端两侧,所述轮组连接在车身后端两侧;所述腿组有一对摆臂腿组,所述摆臂腿组的中心点设置转轴孔,所述转轴孔通过摇摆四连杆机构连接于车身上;所述轮组有一对摇臂轮组,所述每个摇臂轮组通过三连杆机构连接于车身后端,每个摇臂轮组为轮毂电机和后轮毂电机,前、后轮毂电机通过俯仰摇臂机构相连。本发明完全采用被动悬架,前后越障结构都能被动变形适应地形,同时能有效减少地形崎岖对车体本身的影响。
一种全地形轮腿式机器人.pdf
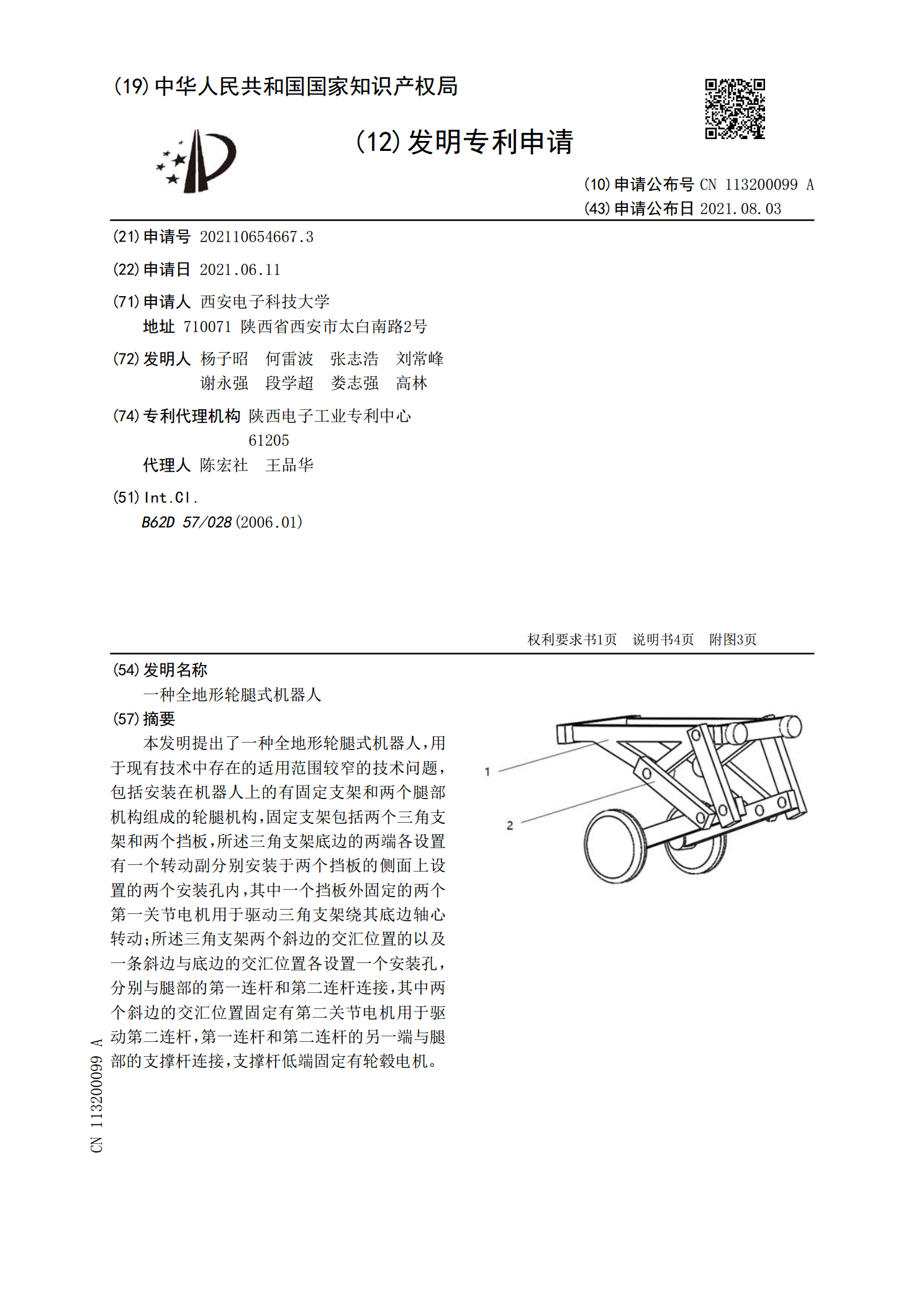
本发明提出了一种全地形轮腿式机器人,用于现有技术中存在的适用范围较窄的技术问题,包括安装在机器人上的有固定支架和两个腿部机构组成的轮腿机构,固定支架包括两个三角支架和两个挡板,所述三角支架底边的两端各设置有一个转动副分别安装于两个挡板的侧面上设置的两个安装孔内,其中一个挡板外固定的两个第一关节电机用于驱动三角支架绕其底边轴心转动;所述三角支架两个斜边的交汇位置的以及一条斜边与底边的交汇位置各设置一个安装孔,分别与腿部的第一连杆和第二连杆连接,其中两个斜边的交汇位置固定有第二关节电机用于驱动第二连杆,第一连
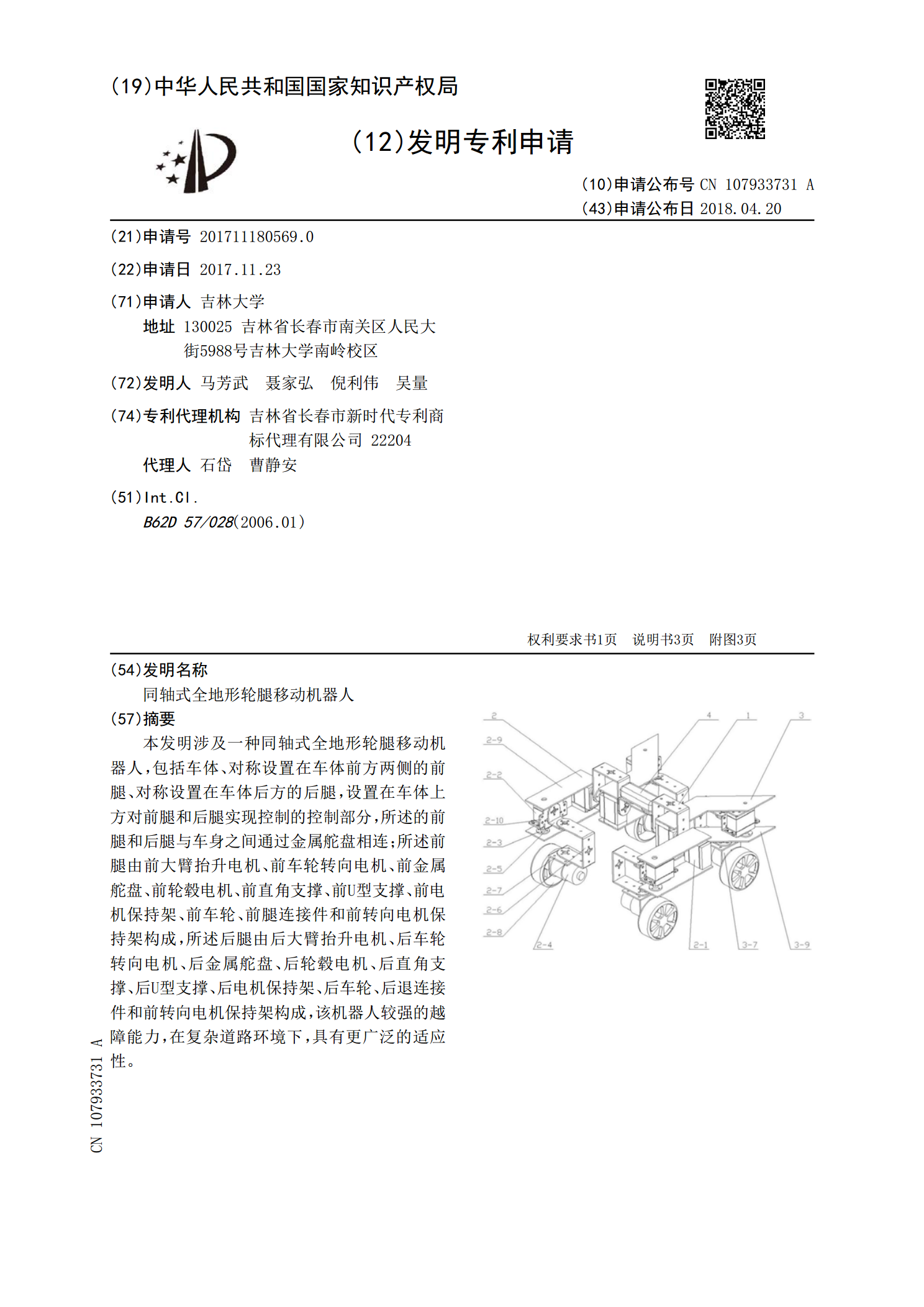
同轴式全地形轮腿移动机器人.pdf
本发明涉及一种同轴式全地形轮腿移动机器人,包括车体、对称设置在车体前方两侧的前腿、对称设置在车体后方的后腿,设置在车体上方对前腿和后腿实现控制的控制部分,所述的前腿和后腿与车身之间通过金属舵盘相连;所述前腿由前大臂抬升电机、前车轮转向电机、前金属舵盘、前轮毂电机、前直角支撑、前U型支撑、前电机保持架、前车轮、前腿连接件和前转向电机保持架构成,所述后腿由后大臂抬升电机、后车轮转向电机、后金属舵盘、后轮毂电机、后直角支撑、后U型支撑、后电机保持架、后车轮、后退连接件和前转向电机保持架构成,该机器人较强的越障能
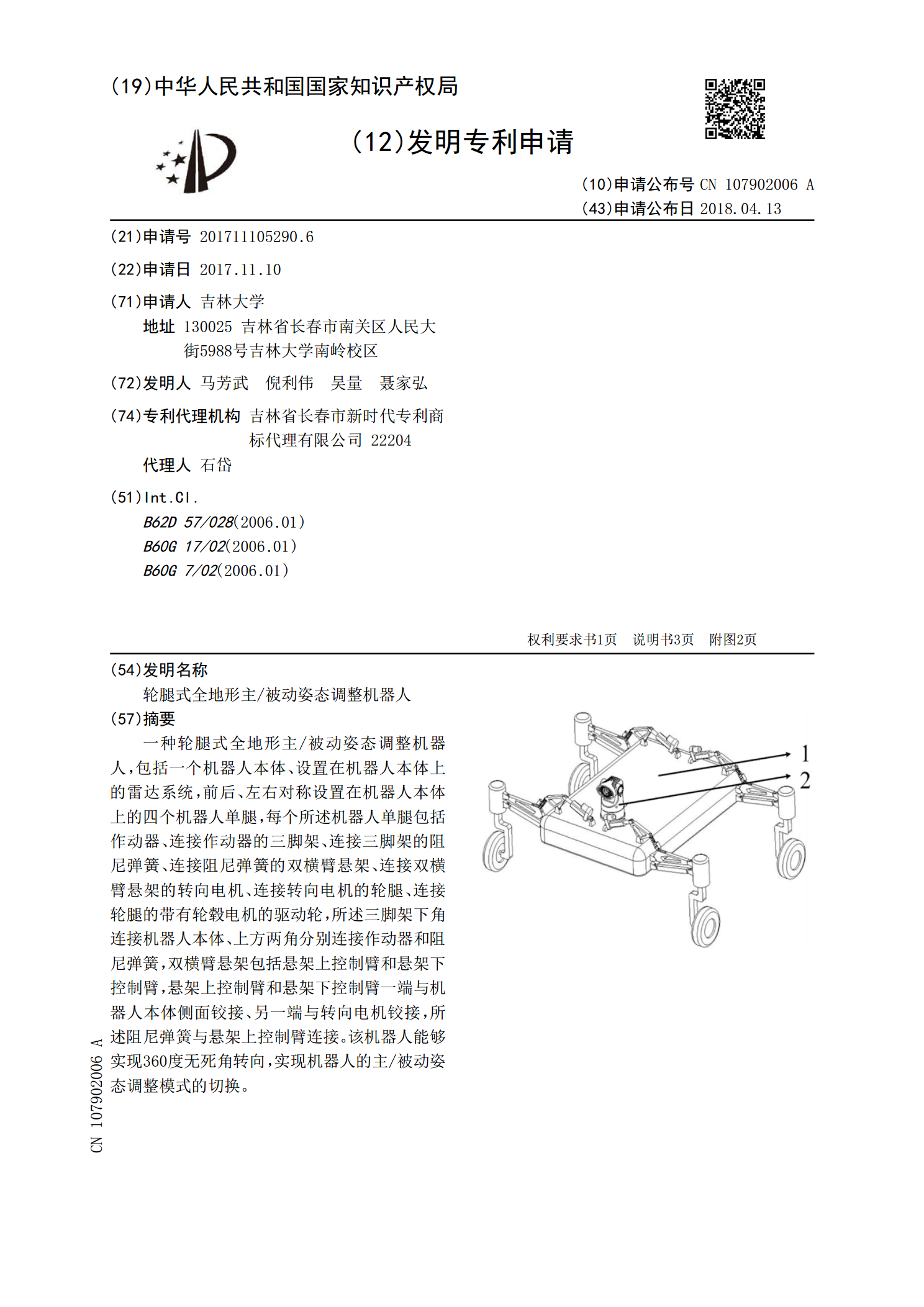
轮腿式全地形主/被动姿态调整机器人.pdf
一种轮腿式全地形主/被动姿态调整机器人,包括一个机器人本体、设置在机器人本体上的雷达系统,前后、左右对称设置在机器人本体上的四个机器人单腿,每个所述机器人单腿包括作动器、连接作动器的三脚架、连接三脚架的阻尼弹簧、连接阻尼弹簧的双横臂悬架、连接双横臂悬架的转向电机、连接转向电机的轮腿、连接轮腿的带有轮毂电机的驱动轮,所述三脚架下角连接机器人本体、上方两角分别连接作动器和阻尼弹簧,双横臂悬架包括悬架上控制臂和悬架下控制臂,悬架上控制臂和悬架下控制臂一端与机器人本体侧面铰接、另一端与转向电机铰接,所述阻尼弹簧与