
泊车机器人超薄全向轮组.pdf

戊午****jj


1/8

2/8

3/8

4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
泊车机器人超薄全向轮组.pdf
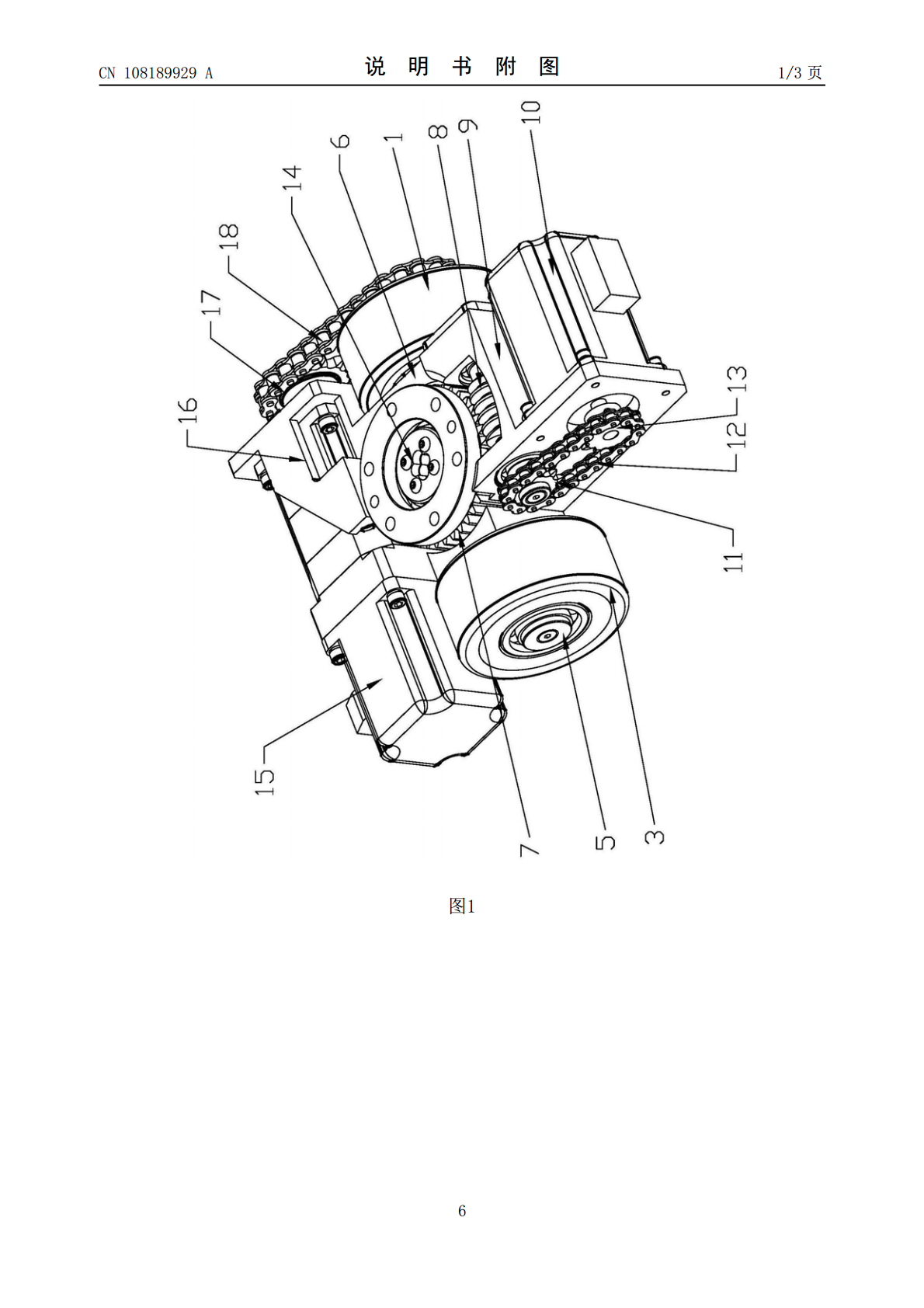
本发明涉及一种泊车机器人,具体的说是一种泊车机器人全向轮组,属于泊车机器人技术领域。其包括主行走轮、行走架、转向机构、转向驱动机构和行走驱动机构,行走轮通过平键连接在行走轮轴上,行走轮轴通过轴承转动连接在行走架内;行走架上连接转向机构输出端,转向机构输出端连接转向驱动机构,转向驱动机构固定在蜗杆架上;行走轮轴一端连接行走驱动机构,行走驱动机构固定在行走驱动电机架上。本发明能在大平面上实现“平搬平”潜入式汽车搬运,能够适应各种车型汽车的搬运;同时,在搬运过程中能够前进后退、横移和转向运动,并可以根据汽车的姿
全向驱动泊车机器人.pdf
本发明公开了一种全向驱动泊车机器人,其包括底盘,轮组系统,举升系统,电池包和控制系统;轮组系统,举升系统,电池包和控制系统安装于底盘上、控制系统包括RFID传感器,控制盒,磁传感器,充电装置,WIFI天线,陀螺仪和激光传感器;底盘包括矩形框和固定于矩形框上的防撞固定板和钣金壳体。本发明能够完成直行、横移、原地打转、装卸货物等功能。在经过不平整路面及重载/轻载等不同工况下对驱动轮提供足够附着力、防止绕线、减轻碰撞对泊车机器人的影响。
一种全向轮、全向轮组及使用该全向轮或全向轮组的载物小车.pdf
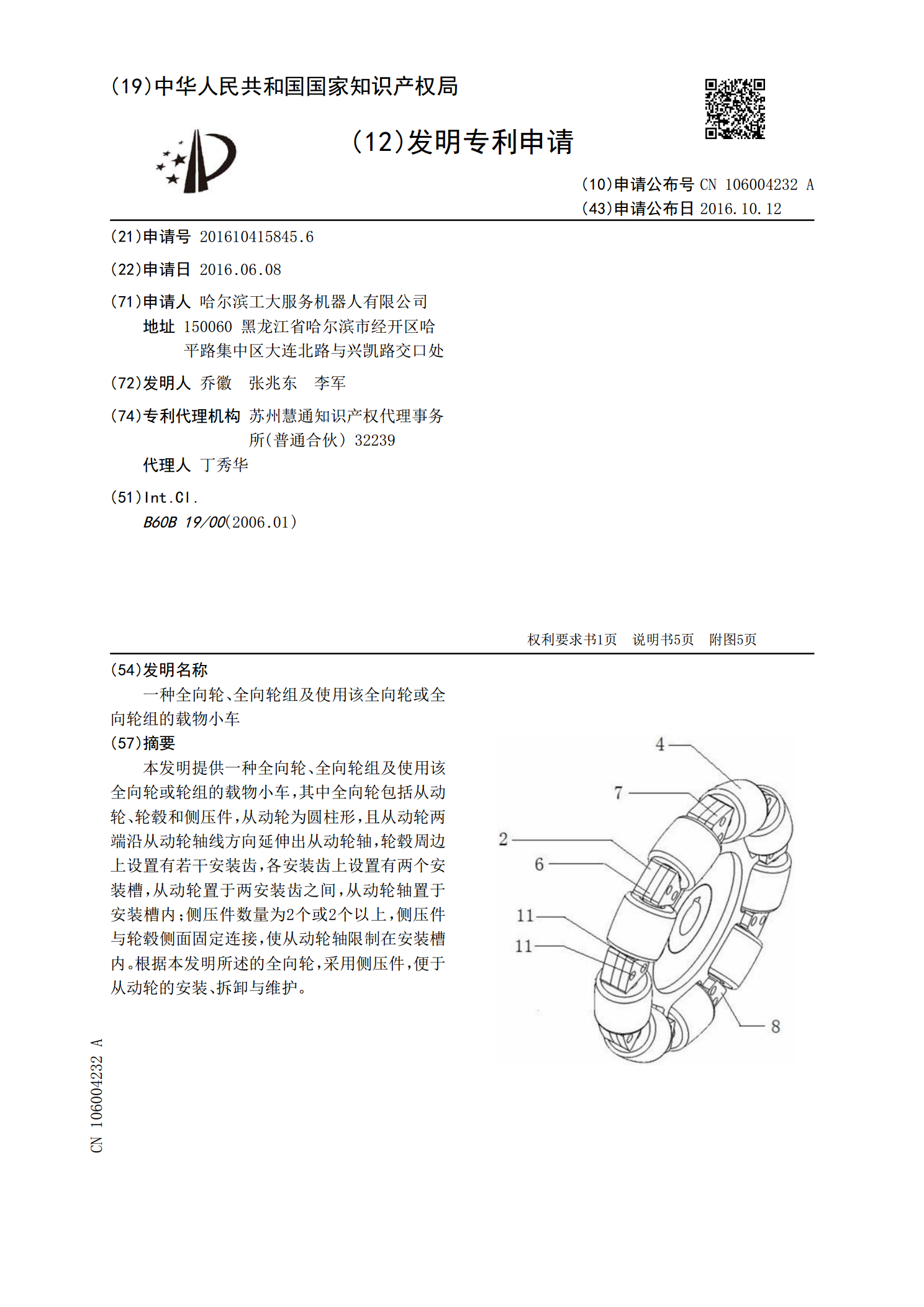
本发明提供一种全向轮、全向轮组及使用该全向轮或轮组的载物小车,其中全向轮包括从动轮、轮毂和侧压件,从动轮为圆柱形,且从动轮两端沿从动轮轴线方向延伸出从动轮轴,轮毂周边上设置有若干安装齿,各安装齿上设置有两个安装槽,从动轮置于两安装齿之间,从动轮轴置于安装槽内;侧压件数量为2个或2个以上,侧压件与轮毂侧面固定连接,使从动轮轴限制在安装槽内。根据本发明所述的全向轮,采用侧压件,便于从动轮的安装、拆卸与维护。
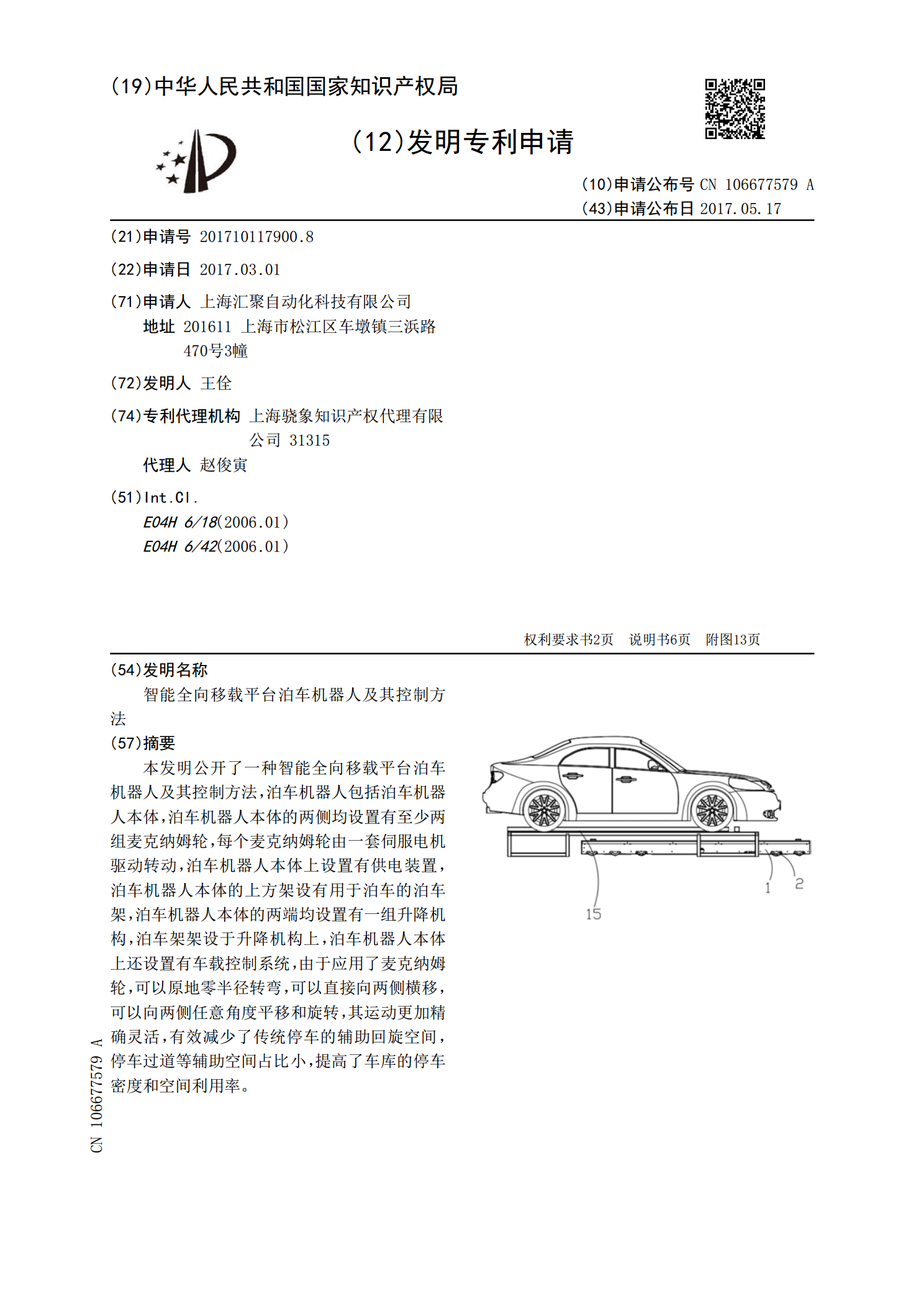
智能全向移载平台泊车机器人及其控制方法.pdf
本发明公开了一种智能全向移载平台泊车机器人及其控制方法,泊车机器人包括泊车机器人本体,泊车机器人本体的两侧均设置有至少两组麦克纳姆轮,每个麦克纳姆轮由一套伺服电机驱动转动,泊车机器人本体上设置有供电装置,泊车机器人本体的上方架设有用于泊车的泊车架,泊车机器人本体的两端均设置有一组升降机构,泊车架架设于升降机构上,泊车机器人本体上还设置有车载控制系统,由于应用了麦克纳姆轮,可以原地零半径转弯,可以直接向两侧横移,可以向两侧任意角度平移和旋转,其运动更加精确灵活,有效减少了传统停车的辅助回旋空间,停车过道等辅
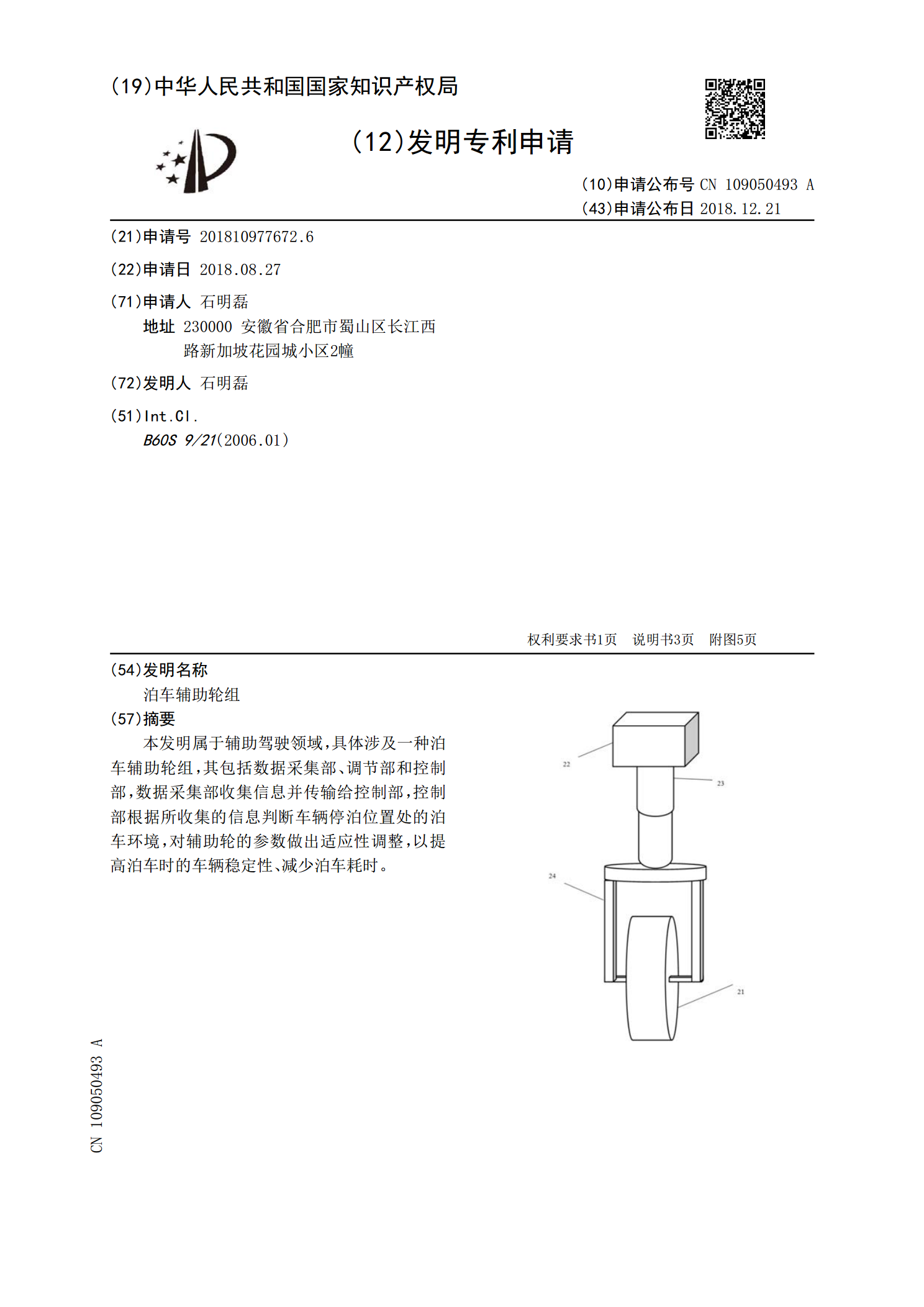
泊车辅助轮组.pdf
本发明属于辅助驾驶领域,具体涉及一种泊车辅助轮组,其包括数据采集部、调节部和控制部,数据采集部收集信息并传输给控制部,控制部根据所收集的信息判断车辆停泊位置处的泊车环境,对辅助轮的参数做出适应性调整,以提高泊车时的车辆稳定性、减少泊车耗时。