
一种多旋翼无人机的驱动机构.pdf

努力****妙风


1/9

2/9

3/9
4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多旋翼无人机的驱动机构.pdf
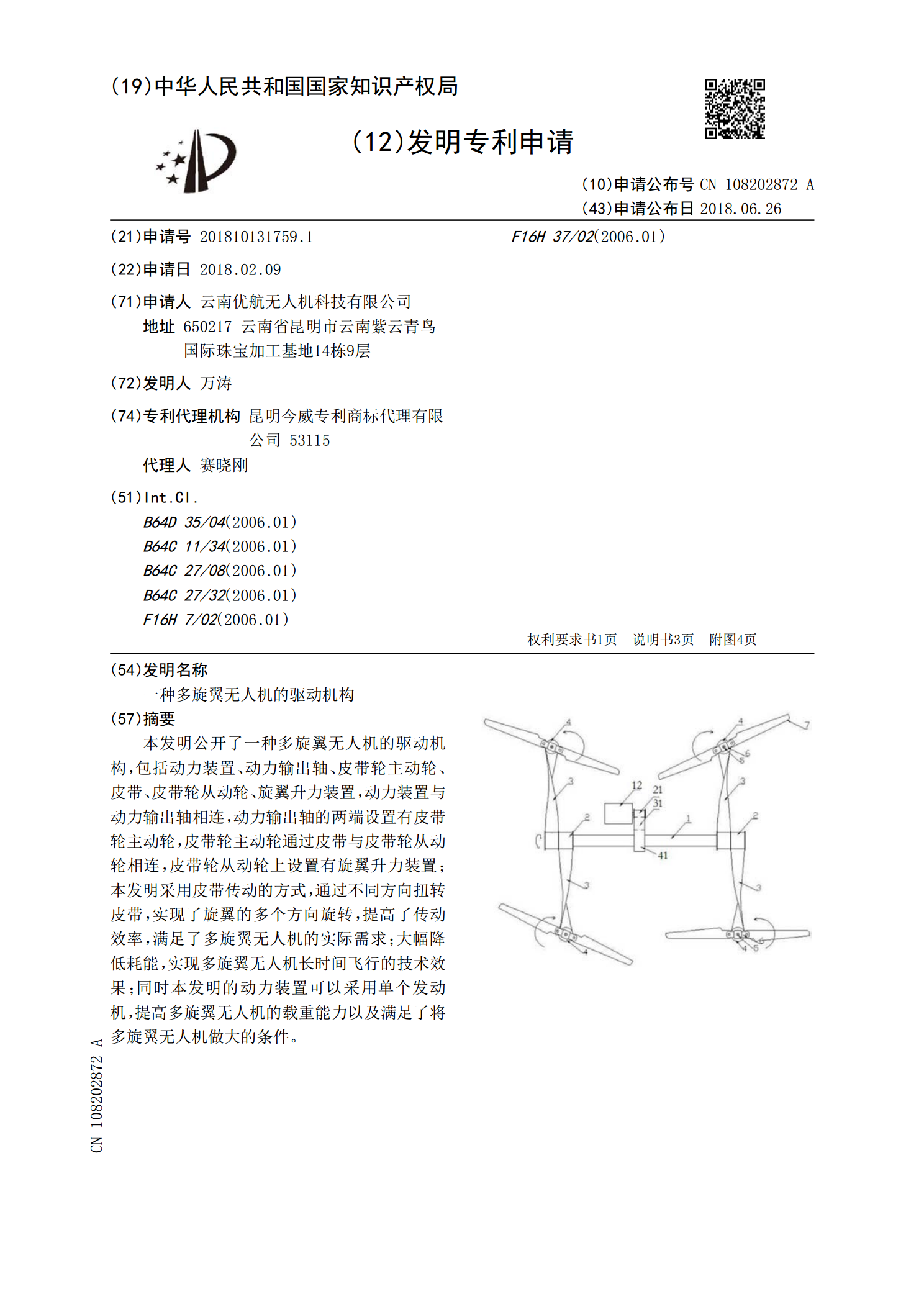
本发明公开了一种多旋翼无人机的驱动机构,包括动力装置、动力输出轴、皮带轮主动轮、皮带、皮带轮从动轮、旋翼升力装置,动力装置与动力输出轴相连,动力输出轴的两端设置有皮带轮主动轮,皮带轮主动轮通过皮带与皮带轮从动轮相连,皮带轮从动轮上设置有旋翼升力装置;本发明采用皮带传动的方式,通过不同方向扭转皮带,实现了旋翼的多个方向旋转,提高了传动效率,满足了多旋翼无人机的实际需求;大幅降低耗能,实现多旋翼无人机长时间飞行的技术效果;同时本发明的动力装置可以采用单个发动机,提高多旋翼无人机的载重能力以及满足了将多旋翼无人
一种多旋翼无人机.pdf
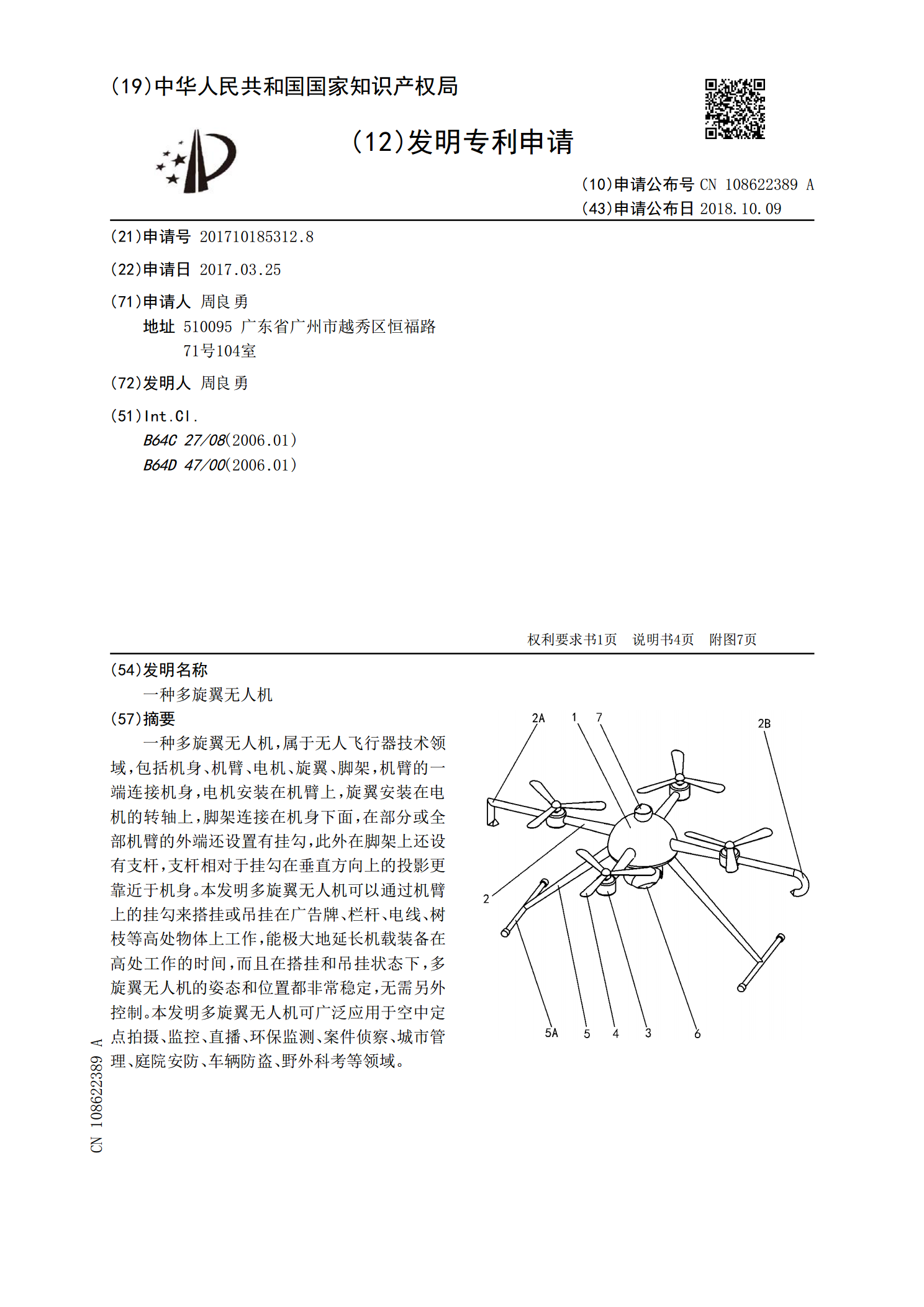
一种多旋翼无人机,属于无人飞行器技术领域,包括机身、机臂、电机、旋翼、脚架,机臂的一端连接机身,电机安装在机臂上,旋翼安装在电机的转轴上,脚架连接在机身下面,在部分或全部机臂的外端还设置有挂勾,此外在脚架上还设有支杆,支杆相对于挂勾在垂直方向上的投影更靠近于机身。本发明多旋翼无人机可以通过机臂上的挂勾来搭挂或吊挂在广告牌、栏杆、电线、树枝等高处物体上工作,能极大地延长机载装备在高处工作的时间,而且在搭挂和吊挂状态下,多旋翼无人机的姿态和位置都非常稳定,无需另外控制。本发明多旋翼无人机可广泛应用于空中定点拍

一种多旋翼无人机.pdf
本发明属于无人机技术领域,具体涉及一种多旋翼无人机,包括中心架,中心架上方装配有机壳,中心架的下方装配有起落架,中心架上方装配有位于机壳内部的飞控主板,机壳的两端装配有机臂组件,机臂组件包括连接臂,连接臂设有两个并对称安装在中心架的两侧,连接臂远离中心架的一端连接有旋翼臂,旋翼臂的两端均设置有旋翼组件,连接臂以及旋翼臂的内部均呈中空结构,且连接臂与机壳之间通过第三通孔形成连通。能够根据使用环境切换机体循环风的温度,在机体内温度较高时能够对循环风制冷来压制机体内温度,而在低温环境使用时,还能够通过加热机体循
一种多旋翼无人机.pdf
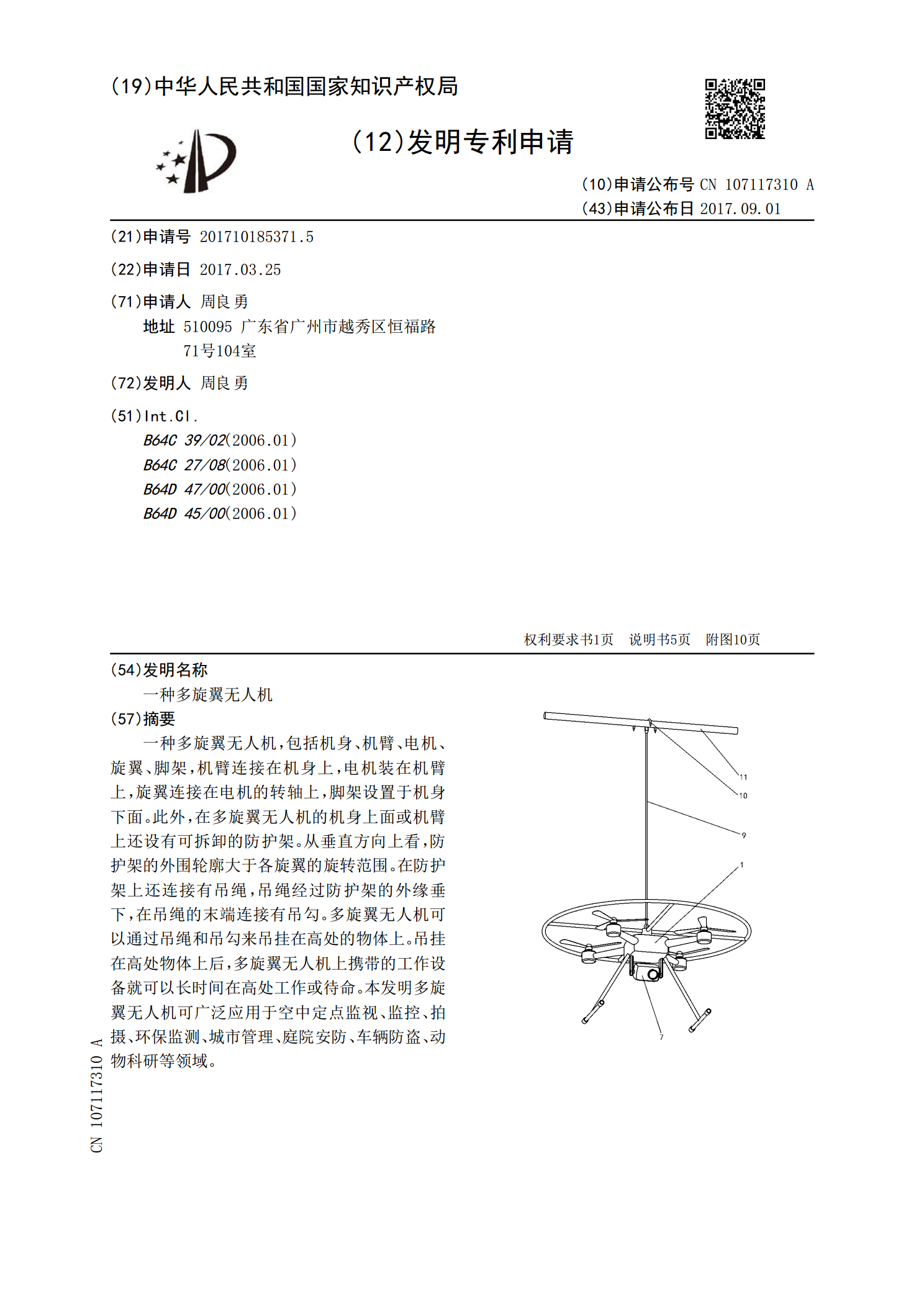
一种多旋翼无人机,包括机身、机臂、电机、旋翼、脚架,机臂连接在机身上,电机装在机臂上,旋翼连接在电机的转轴上,脚架设置于机身下面。此外,在多旋翼无人机的机身上面或机臂上还设有可拆卸的防护架。从垂直方向上看,防护架的外围轮廓大于各旋翼的旋转范围。在防护架上还连接有吊绳,吊绳经过防护架的外缘垂下,在吊绳的末端连接有吊勾。多旋翼无人机可以通过吊绳和吊勾来吊挂在高处的物体上。吊挂在高处物体上后,多旋翼无人机上携带的工作设备就可以长时间在高处工作或待命。本发明多旋翼无人机可广泛应用于空中定点监视、监控、拍摄、环保监

一种多旋翼无人机.pdf
一种多旋翼无人机,包括机身、机臂、电机、旋翼、脚架,机臂连接在机身上,电机装在机臂上,旋翼连接在电机的转轴上,脚架设置于机身下面。此外,在多旋翼无人机机身上面还设有可拆卸的防护架,从垂直方向看,该防护架的外围轮廓大于各旋翼的旋转范围;在防护架上还连接有吊绳,吊绳的末端连接有磁性吸头,该磁性吸头中设有磁体。多旋翼无人机可以通过磁性吸头来吸附并吊挂在高处的铁质物体上,或者通过吊绳缠绕在高处的物体上实现吊挂。吊挂在高处物体上后,多旋翼无人机上携带的工作设备就可以长时间在高处工作或待命。本发明多旋翼无人机可广泛应