
一种爬绳用机器人.pdf

An****70

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种爬绳用机器人.pdf
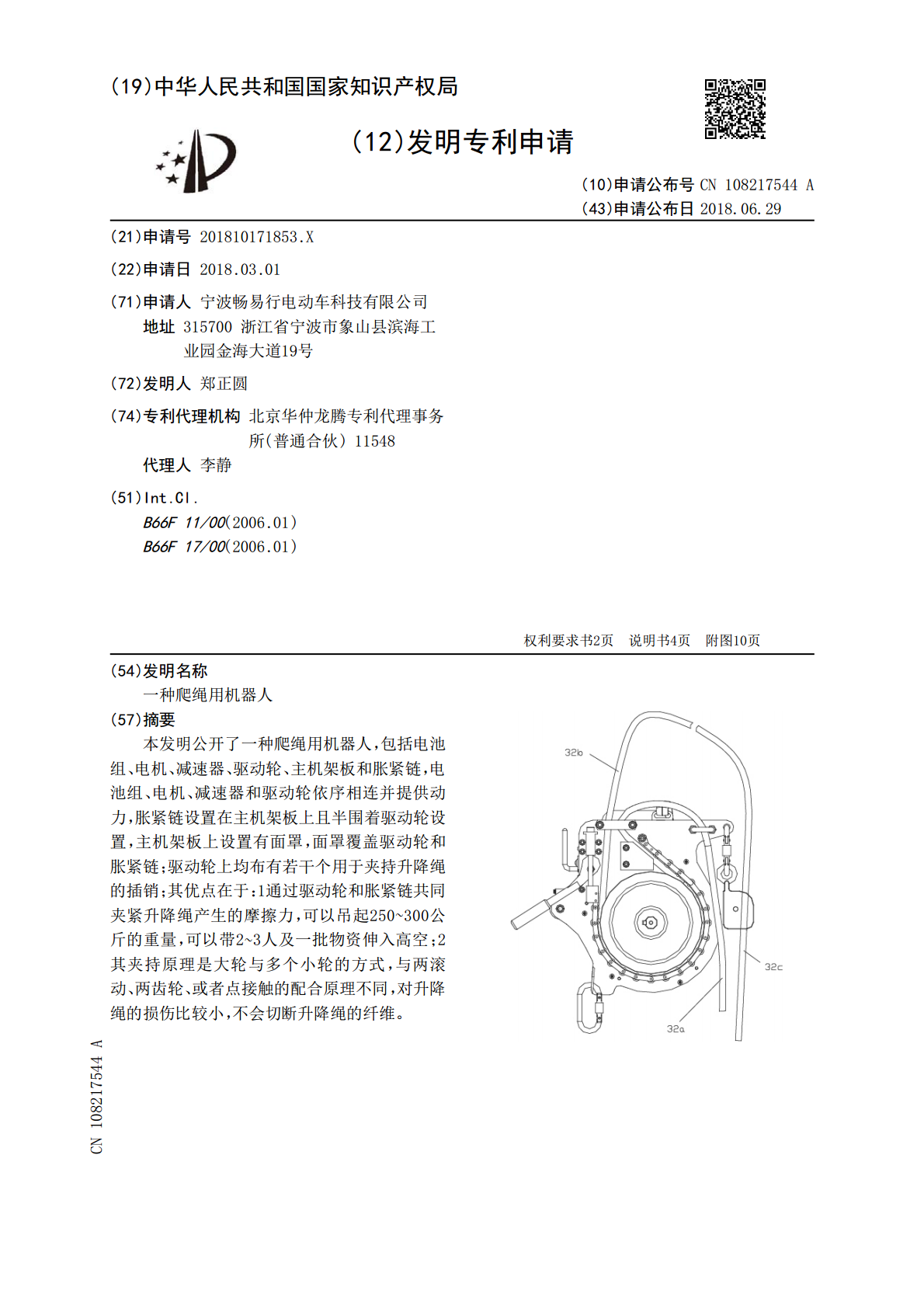
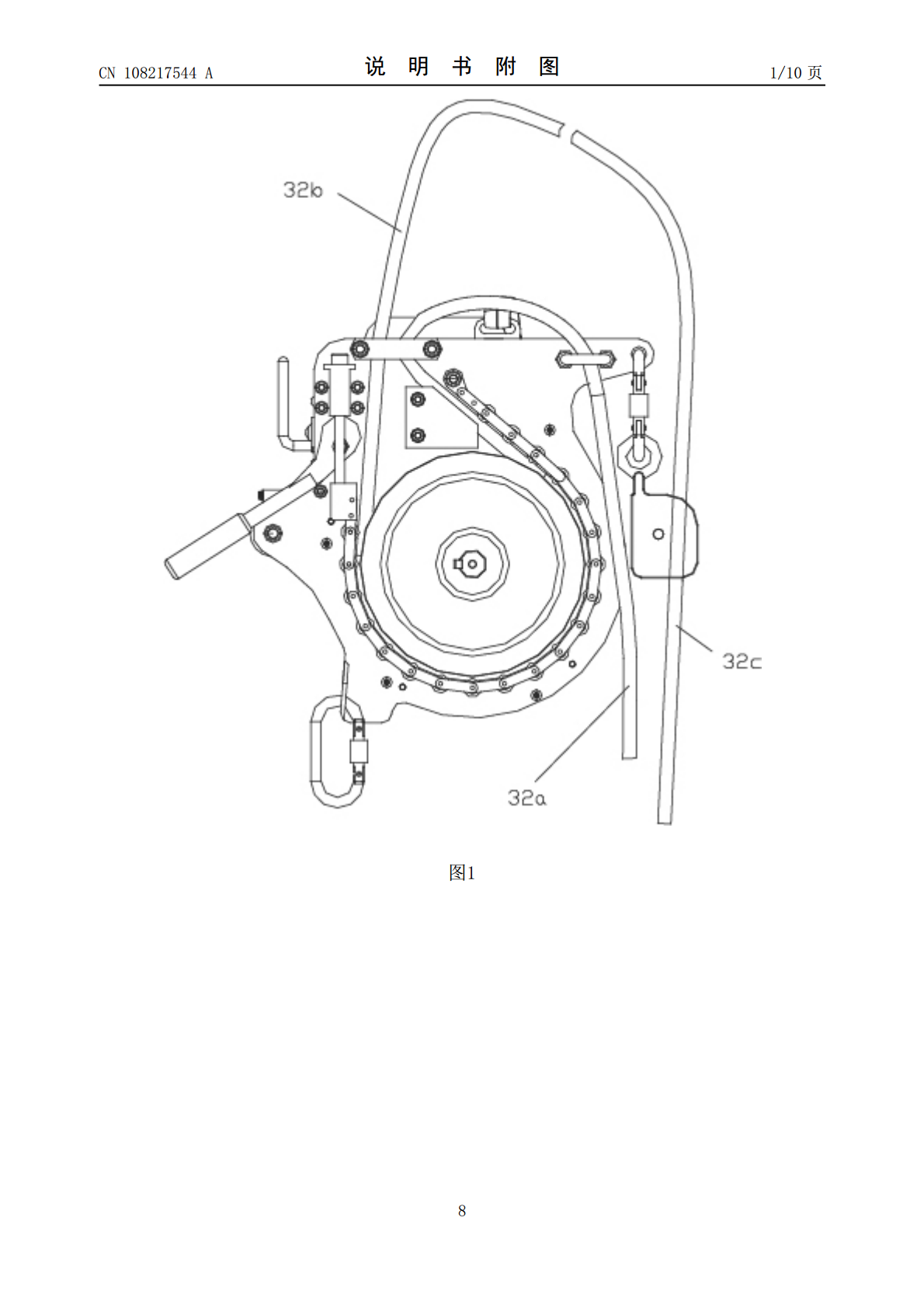
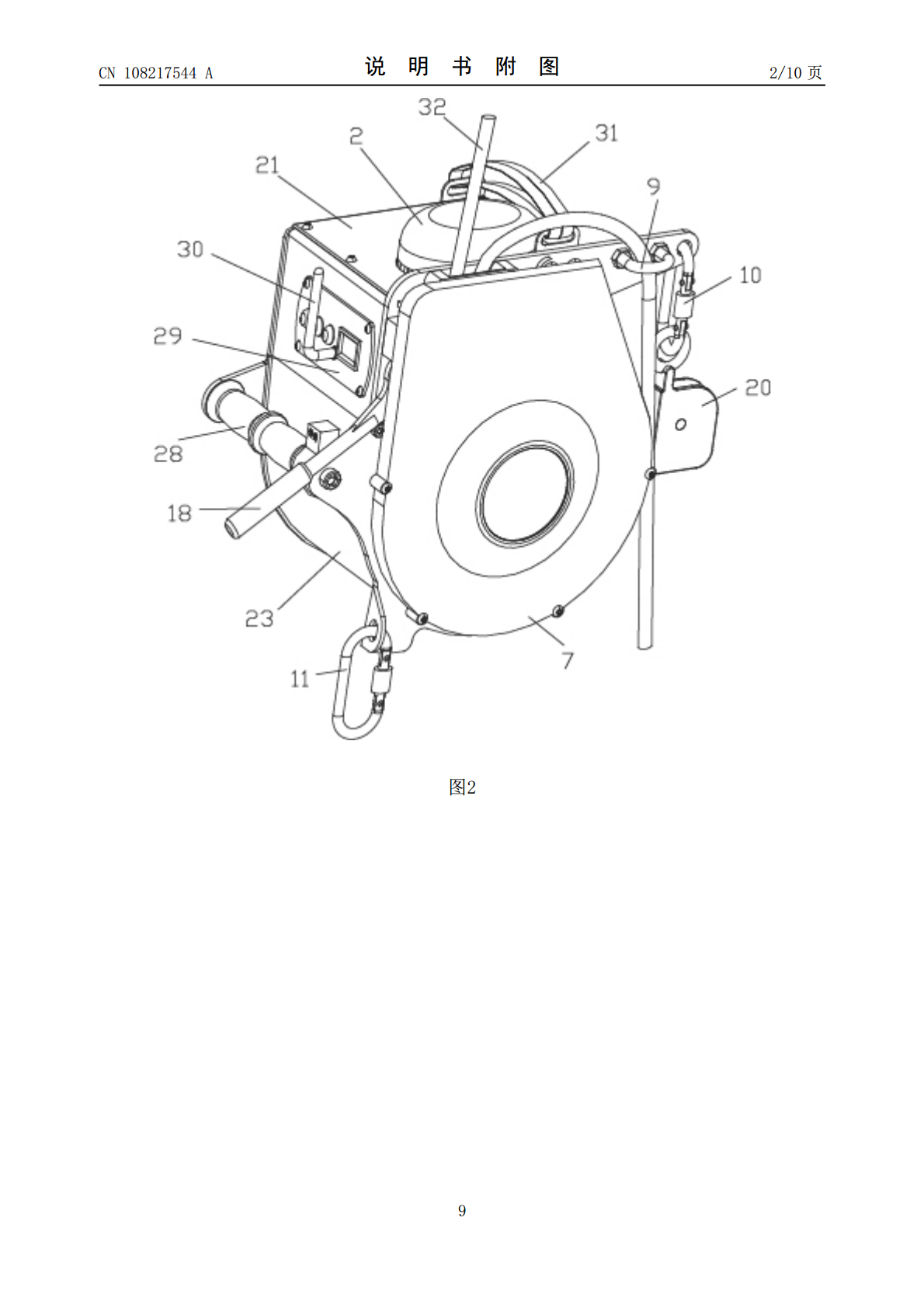
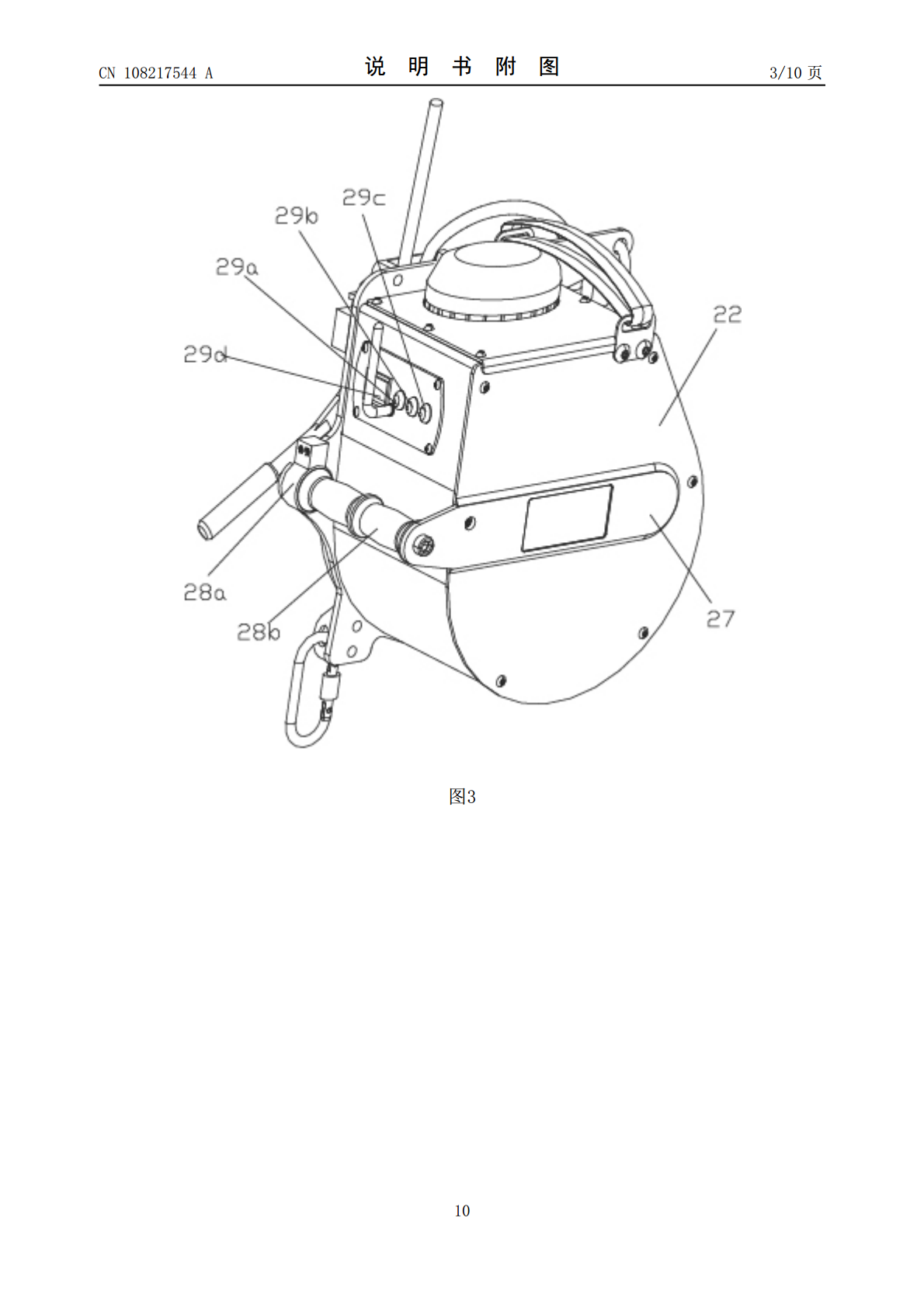
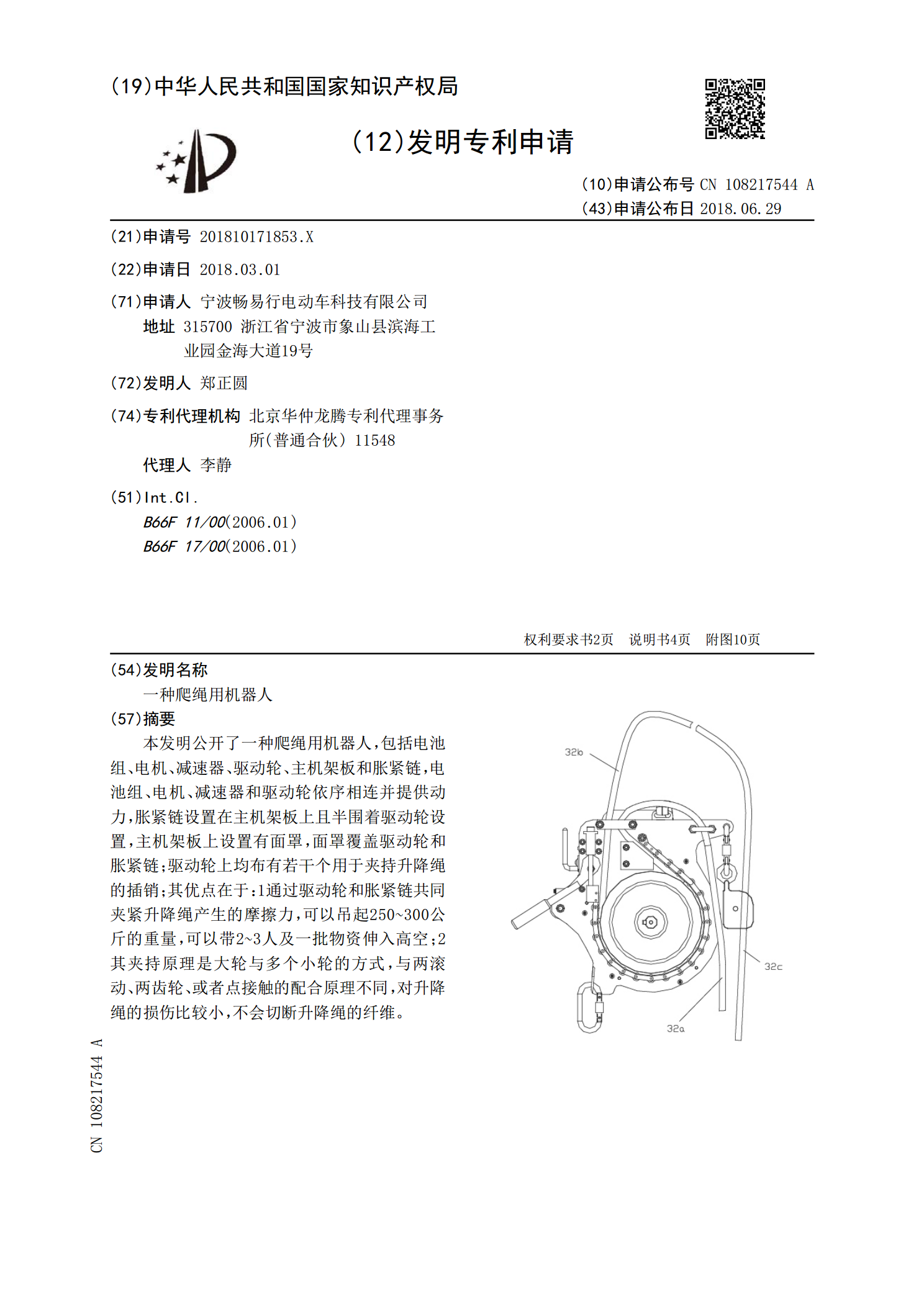
本发明公开了一种爬绳用机器人,包括电池组、电机、减速器、驱动轮、主机架板和胀紧链,电池组、电机、减速器和驱动轮依序相连并提供动力,胀紧链设置在主机架板上且半围着驱动轮设置,主机架板上设置有面罩,面罩覆盖驱动轮和胀紧链;驱动轮上均布有若干个用于夹持升降绳的插销;其优点在于:1通过驱动轮和胀紧链共同夹紧升降绳产生的摩擦力,可以吊起250~300公斤的重量,可以带2~3人及一批物资伸入高空;2其夹持原理是大轮与多个小轮的方式,与两滚动、两齿轮、或者点接触的配合原理不同,对升降绳的损伤比较小,不会切断升降绳的纤维
一种爬绳机器人.pdf
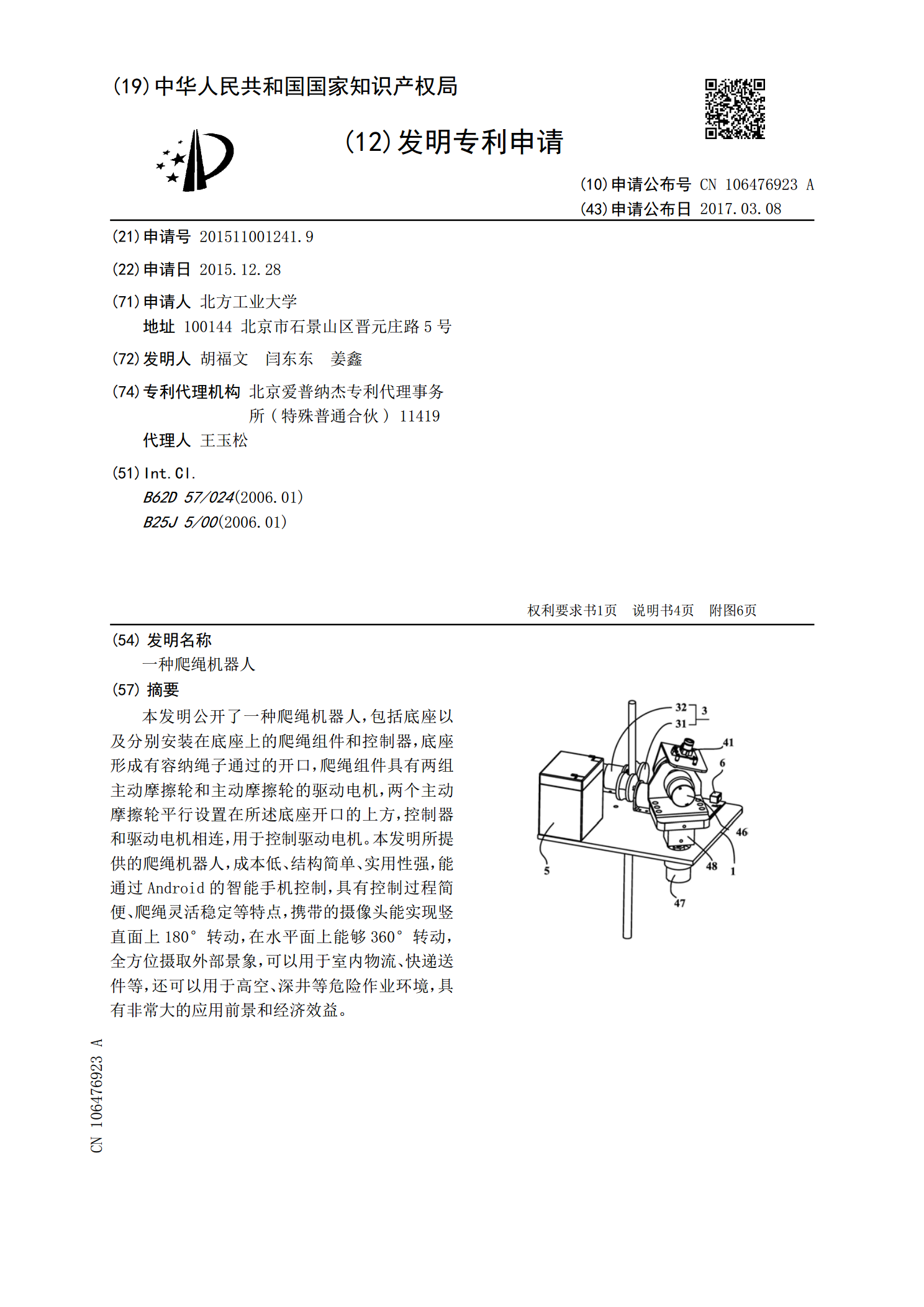
本发明公开了一种爬绳机器人,包括底座以及分别安装在底座上的爬绳组件和控制器,底座形成有容纳绳子通过的开口,爬绳组件具有两组主动摩擦轮和主动摩擦轮的驱动电机,两个主动摩擦轮平行设置在所述底座开口的上方,控制器和驱动电机相连,用于控制驱动电机。本发明所提供的爬绳机器人,成本低、结构简单、实用性强,能通过Android的智能手机控制,具有控制过程简便、爬绳灵活稳定等特点,携带的摄像头能实现竖直面上180°转动,在水平面上能够360°转动,全方位摄取外部景象,可以用于室内物流、快递送件等,还可以用于高空、深井等危
一种爬绳机器人.pdf
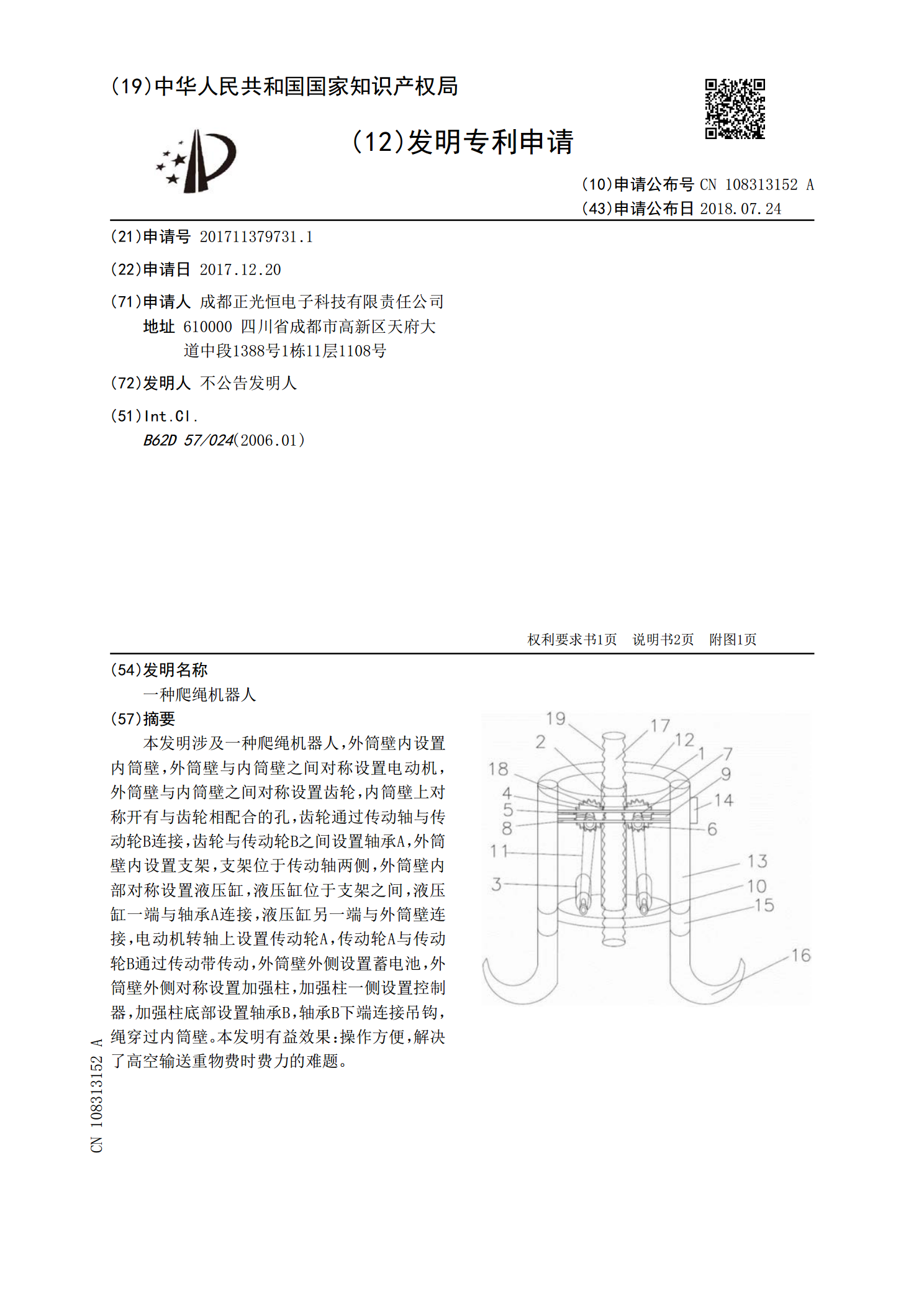
本发明涉及一种爬绳机器人,外筒壁内设置内筒壁,外筒壁与内筒壁之间对称设置电动机,外筒壁与内筒壁之间对称设置齿轮,内筒壁上对称开有与齿轮相配合的孔,齿轮通过传动轴与传动轮B连接,齿轮与传动轮B之间设置轴承A,外筒壁内设置支架,支架位于传动轴两侧,外筒壁内部对称设置液压缸,液压缸位于支架之间,液压缸一端与轴承A连接,液压缸另一端与外筒壁连接,电动机转轴上设置传动轮A,传动轮A与传动轮B通过传动带传动,外筒壁外侧设置蓄电池,外筒壁外侧对称设置加强柱,加强柱一侧设置控制器,加强柱底部设置轴承B,轴承B下端连接吊钩

一种多功能爬绳救援机器人.pdf
本发明涉及救援机器人技术领域,公开了一种多功能爬绳救援机器人,包括主动齿轮、第一从动齿轮组件、第二从动齿轮组件、滚轮组件、卷绕绳、驱动电机、电机驱动电路、主控模块和遥控模块,所述主动齿轮、第一从动齿轮组件、第二从动齿轮组件和滚轮组件依次排列,所述驱动电机通过驱动轴与主动齿轮连接,所述电机驱动电路与驱动电机连接,所述主控模块与电机驱动电路连接,所述遥控模块与主控模块无线连接。本发明的救援机器人可以携带逃生工具、安装电子探测设备,进入危险地域,并且受人远程控制,能快速完成任务。
一种管道巡检微型爬绳机器人.pdf
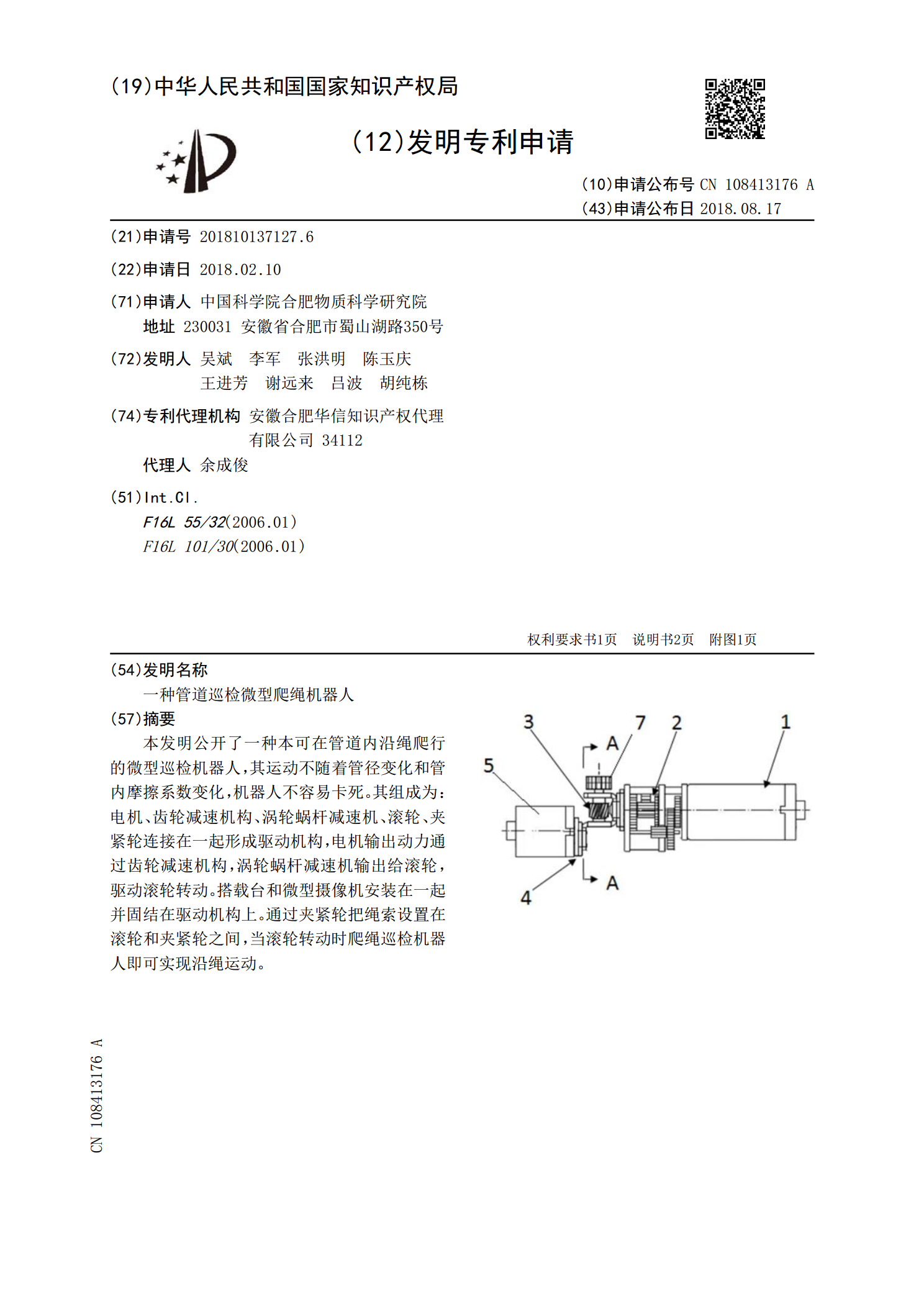
本发明公开了一种本可在管道内沿绳爬行的微型巡检机器人,其运动不随着管径变化和管内摩擦系数变化,机器人不容易卡死。其组成为:电机、齿轮减速机构、涡轮蜗杆减速机、滚轮、夹紧轮连接在一起形成驱动机构,电机输出动力通过齿轮减速机构,涡轮蜗杆减速机输出给滚轮,驱动滚轮转动。搭载台和微型摄像机安装在一起并固结在驱动机构上。通过夹紧轮把绳索设置在滚轮和夹紧轮之间,当滚轮转动时爬绳巡检机器人即可实现沿绳运动。