
轮胎位置定位方法和装置.pdf

灵慧****89

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮胎位置定位方法和装置.pdf
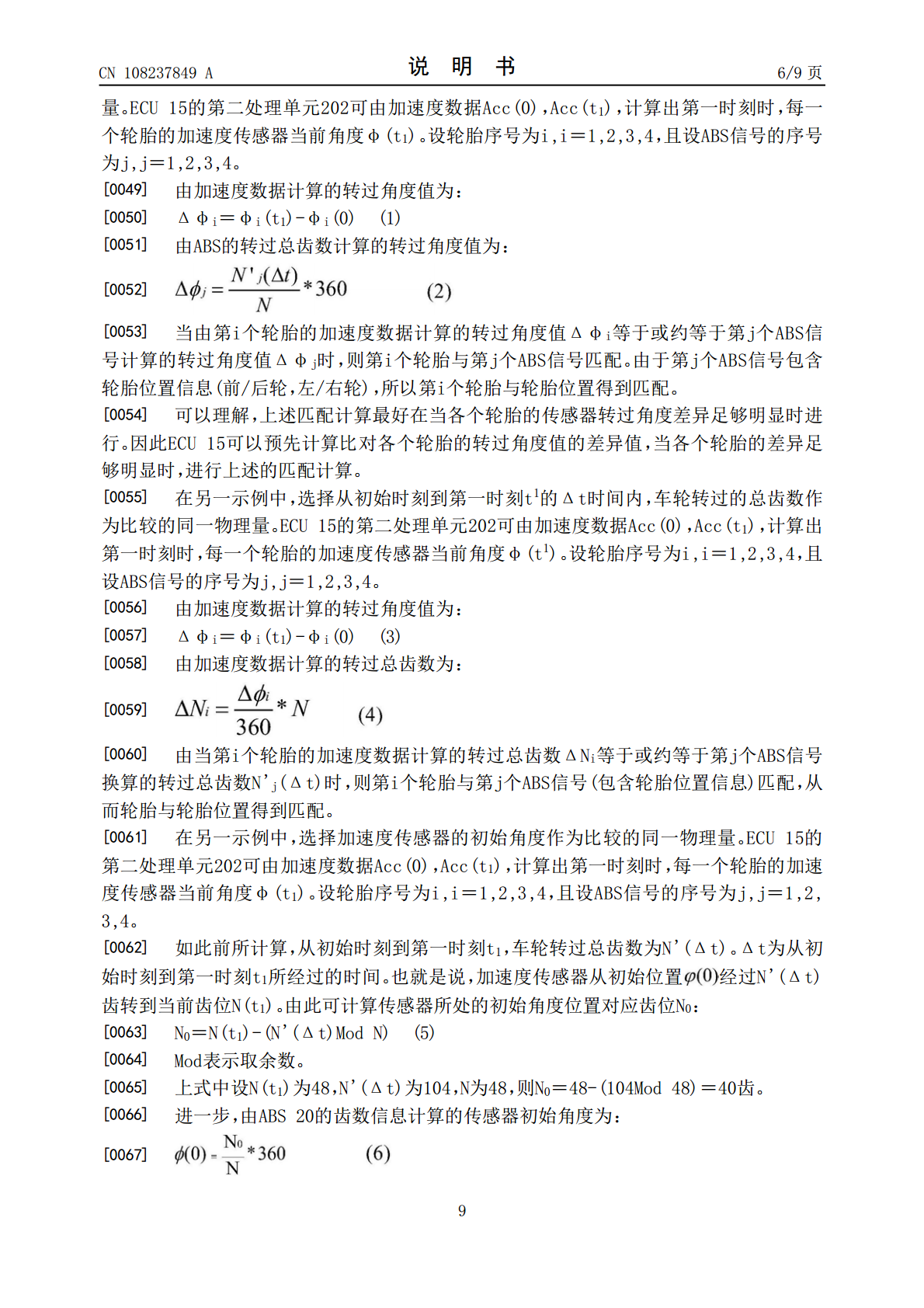
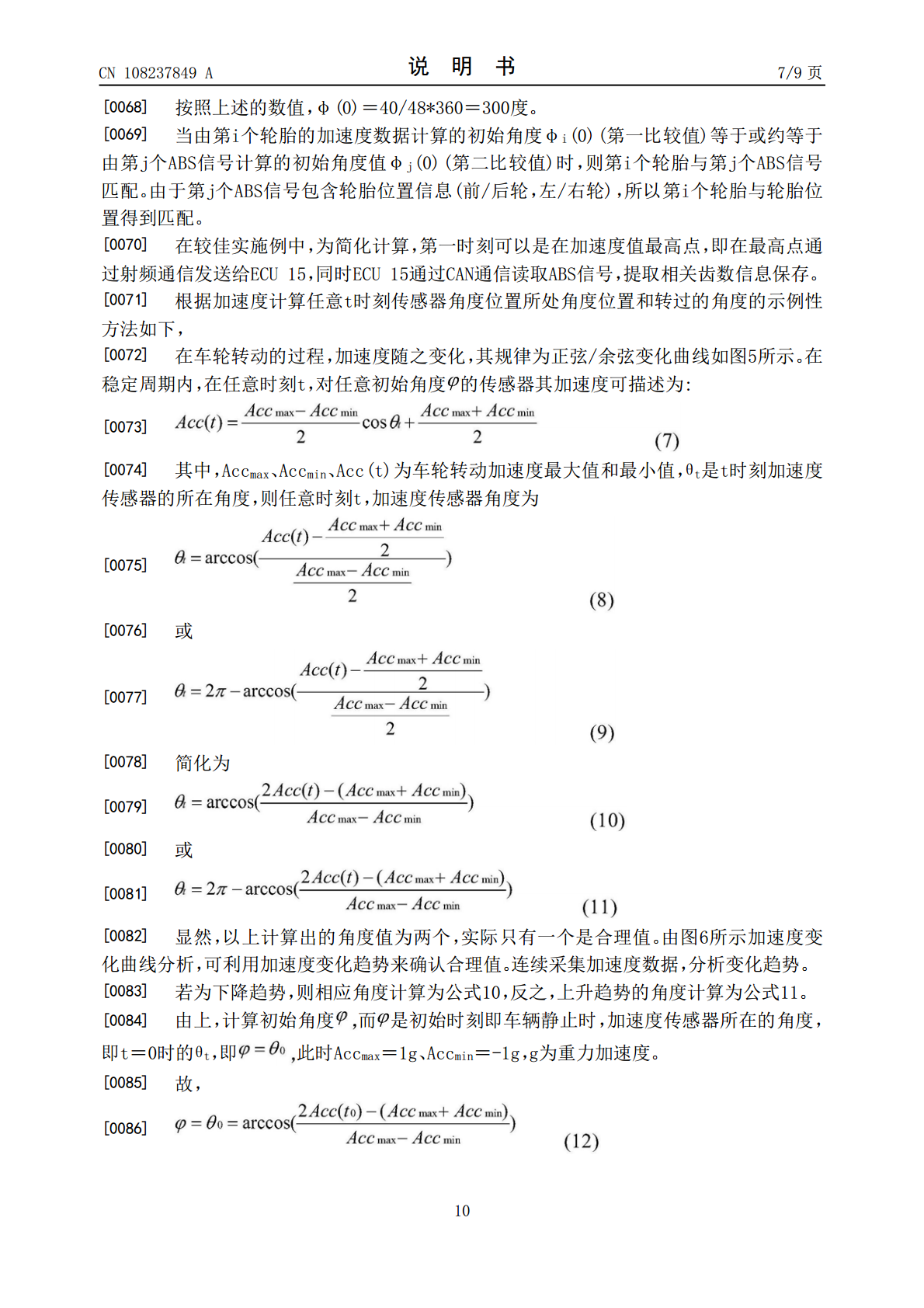
本发明提供了一种轮胎位置定位方法和装置。该装置包括多个发射机和电子控制单元。多个发射机分别安装在汽车的各个轮胎上,每个发射机包括加速度传感器。电子控制单元获得各加速度数据的稳定周期、各加速度传感器的当前角度,以及接收制动防抱死系统的各轮胎位置的齿数信息。电子控制单元将每一轮胎位置分别假设为对应各个加速度传感器,分别根据每一轮胎位置接收的齿数信息、各加速度传感器的当前角度和稳定周期,计算每一轮胎位置假设对应的各加速度传感器的初始角度;根据多次计算结果获得将每一轮胎位置分别假设对应的各个加速度传感器的初始角度

轮胎位置定位方法和装置.pdf
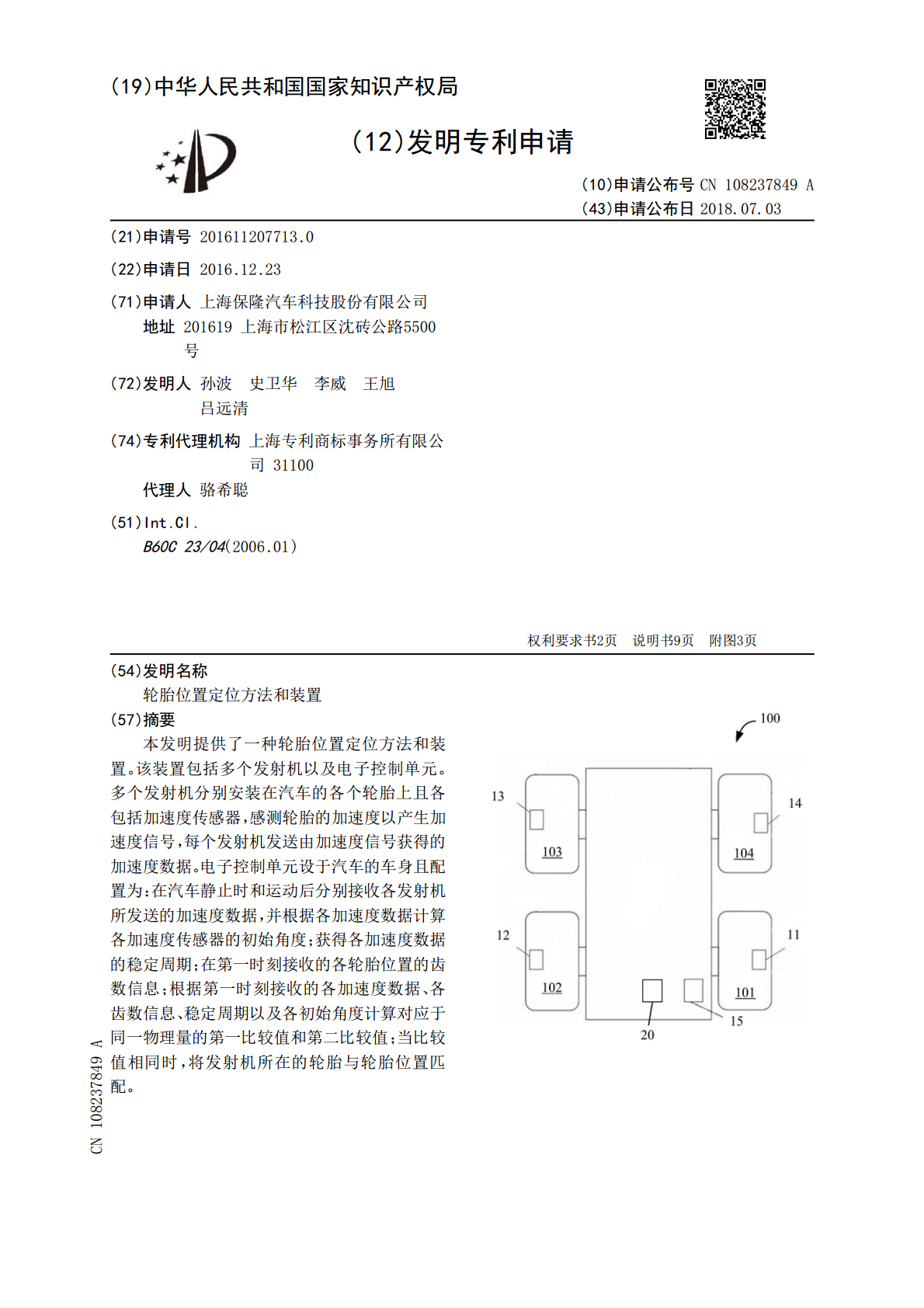
本发明提供了一种轮胎位置定位方法和装置。该装置包括多个发射机以及电子控制单元。多个发射机分别安装在汽车的各个轮胎上且各包括加速度传感器,感测轮胎的加速度以产生加速度信号,每个发射机发送由加速度信号获得的加速度数据。电子控制单元设于汽车的车身且配置为:在汽车静止时和运动后分别接收各发射机所发送的加速度数据,并根据各加速度数据计算各加速度传感器的初始角度;获得各加速度数据的稳定周期;在第一时刻接收的各轮胎位置的齿数信息;根据第一时刻接收的各加速度数据、各齿数信息、稳定周期以及各初始角度计算对应于同一物理量的第

轮胎位置定位方法、装置及胎压监测系统.pdf
本发明实施例涉及汽车技术领域,公开了一种轮胎位置定位方法、装置、TPMS接收器、胎压传感器、胎压监测系统及汽车。所述方法包括:控制第一激励器发送第一激励信号,并且控制第二激励器发送第二激励信号;分别接收来自每个胎压传感器根据第一激励信号或第二激励信号生成的响应信号;根据接收响应信号的时间,进行前后轮的定位,以识别出前车轮或后车轮的胎压传感器发出的响应信号;根据信号强度信息,进行左右轮的定位,以识别出左车轮或右车轮的胎压传感器发出的响应信号。通过根据接收响应信号的时间和信号强度信息进行车轮的定位,可以实现在
轮胎位置交换建议装置和轮胎位置交换建议方法.pdf
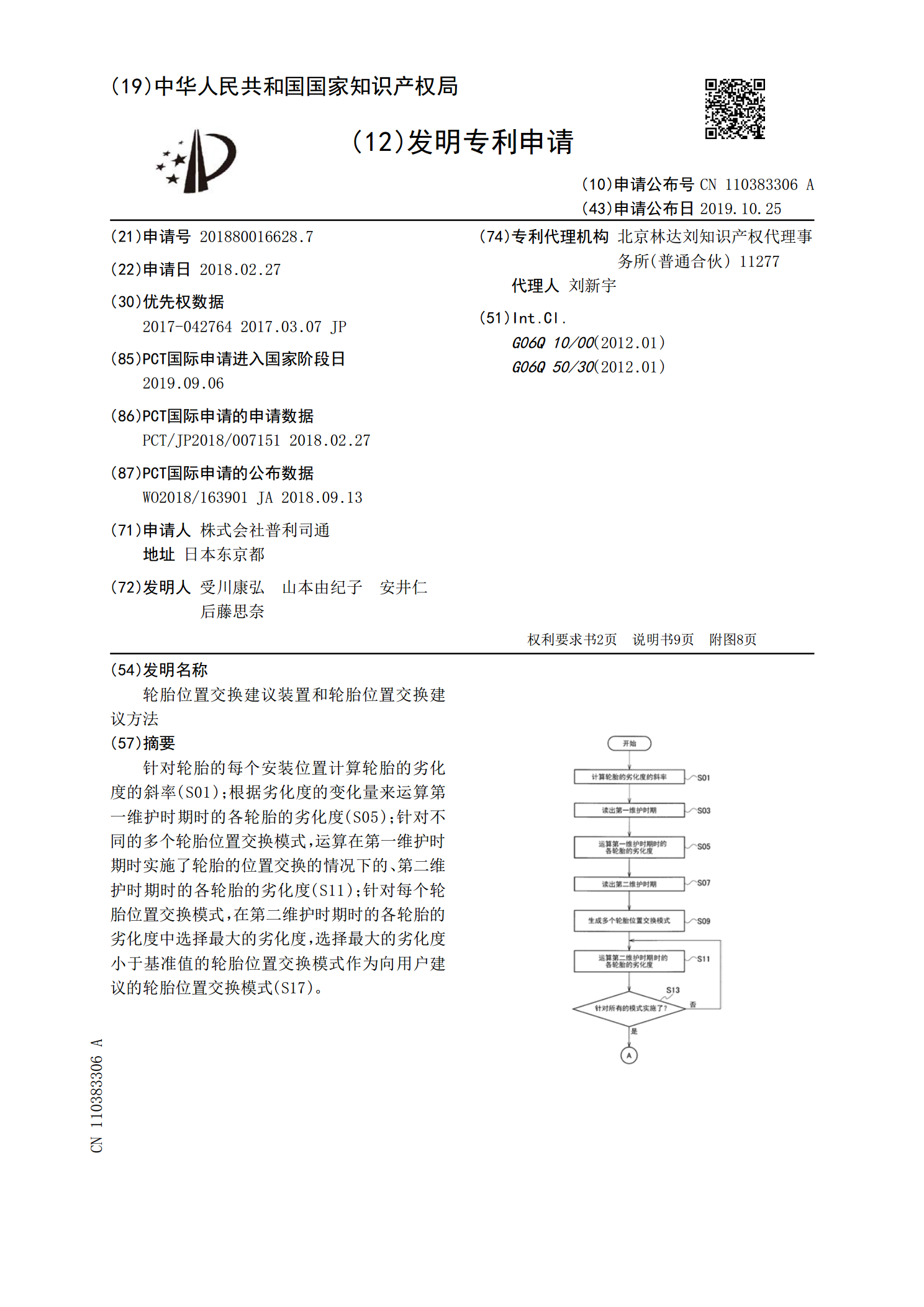
针对轮胎的每个安装位置计算轮胎的劣化度的斜率(S01);根据劣化度的变化量来运算第一维护时期时的各轮胎的劣化度(S05);针对不同的多个轮胎位置交换模式,运算在第一维护时期时实施了轮胎的位置交换的情况下的、第二维护时期时的各轮胎的劣化度(S11);针对每个轮胎位置交换模式,在第二维护时期时的各轮胎的劣化度中选择最大的劣化度,选择最大的劣化度小于基准值的轮胎位置交换模式作为向用户建议的轮胎位置交换模式(S17)。
汽车轮胎定位方法和装置.pdf
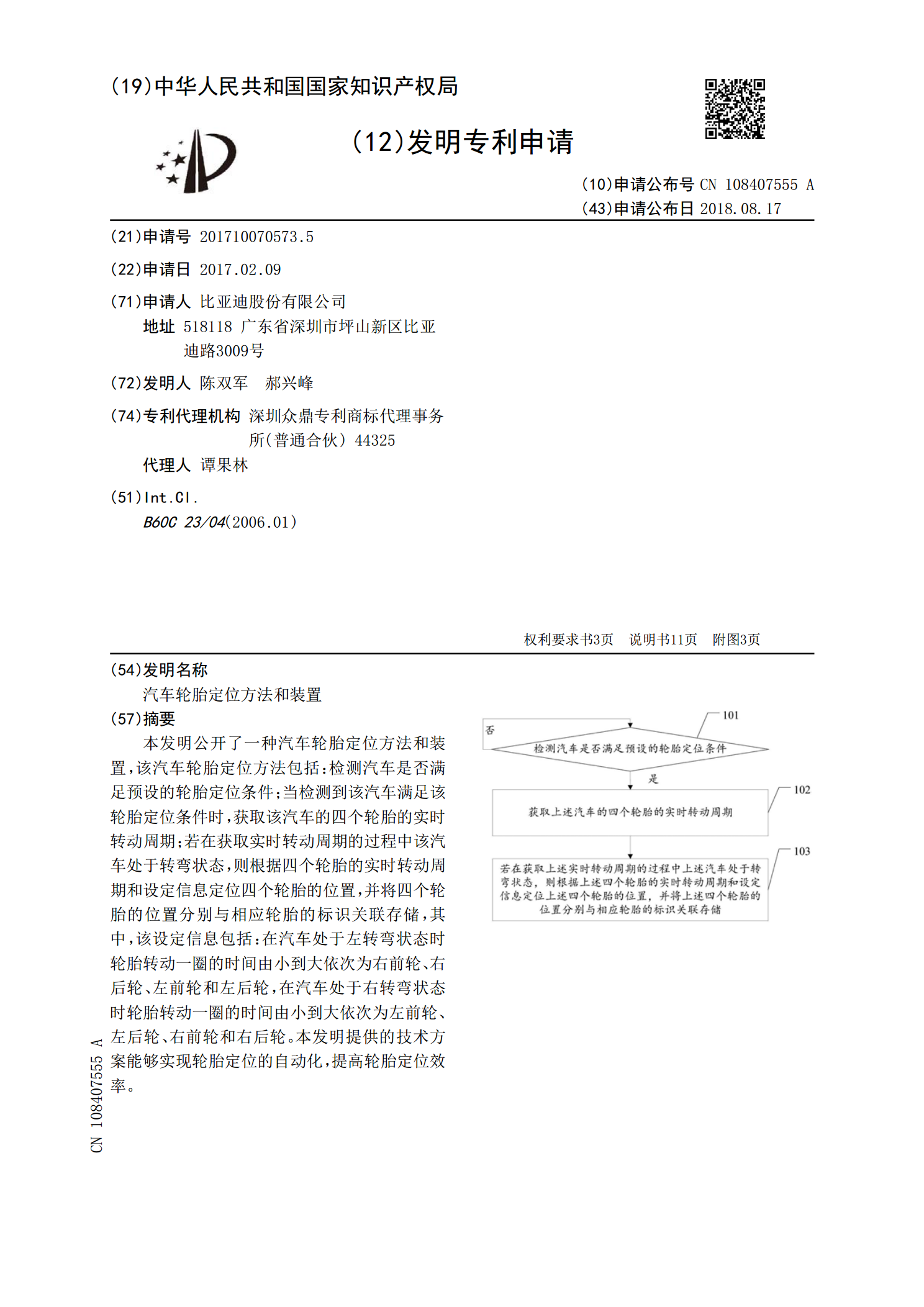
本发明公开了一种汽车轮胎定位方法和装置,该汽车轮胎定位方法包括:检测汽车是否满足预设的轮胎定位条件;当检测到该汽车满足该轮胎定位条件时,获取该汽车的四个轮胎的实时转动周期;若在获取实时转动周期的过程中该汽车处于转弯状态,则根据四个轮胎的实时转动周期和设定信息定位四个轮胎的位置,并将四个轮胎的位置分别与相应轮胎的标识关联存储,其中,该设定信息包括:在汽车处于左转弯状态时轮胎转动一圈的时间由小到大依次为右前轮、右后轮、左前轮和左后轮,在汽车处于右转弯状态时轮胎转动一圈的时间由小到大依次为左前轮、左后轮、右前轮