
一种基于双目视觉的插座定位方法.pdf

一条****88


1/9
2/9

3/9

4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于双目视觉的插座定位方法.pdf
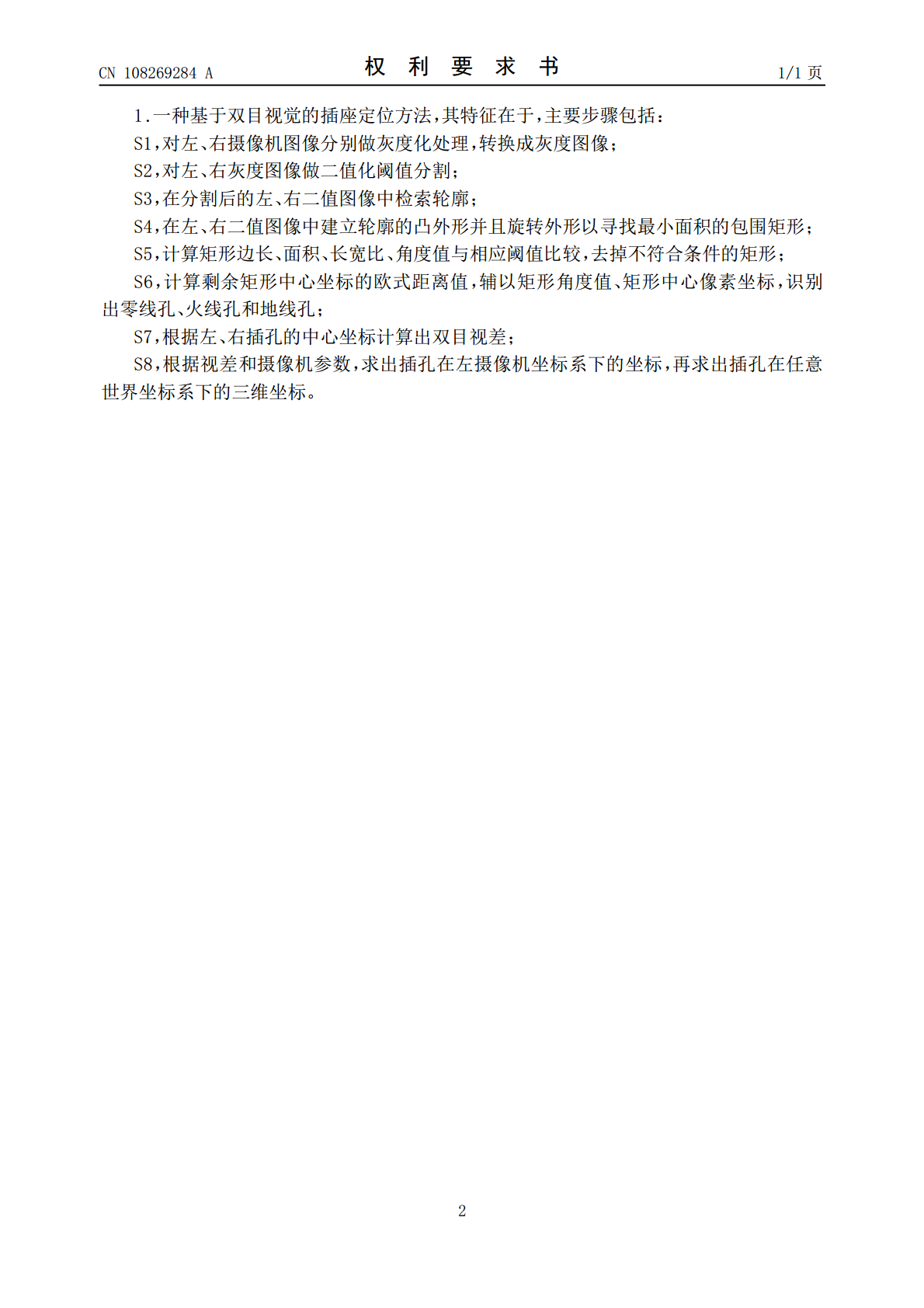
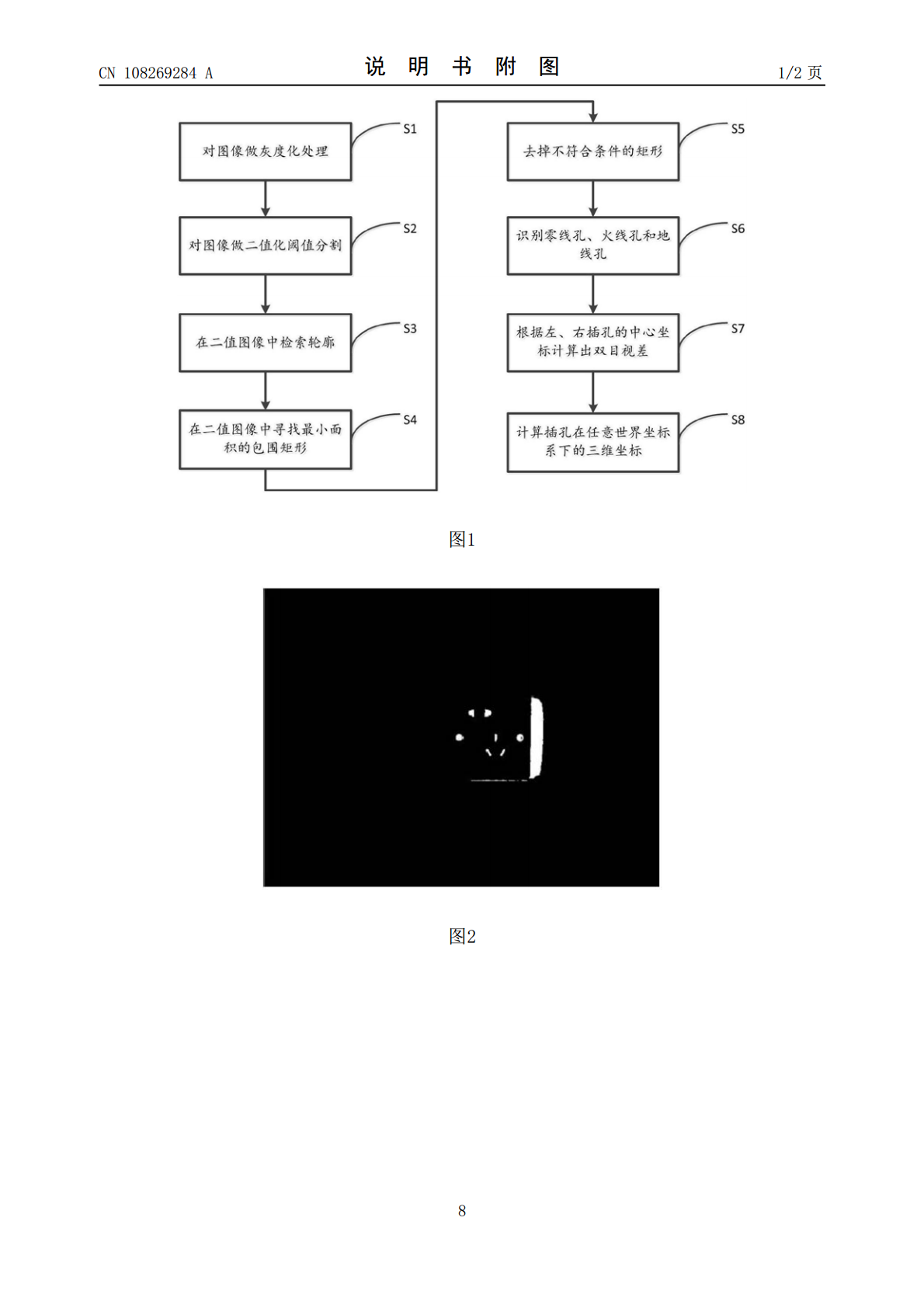
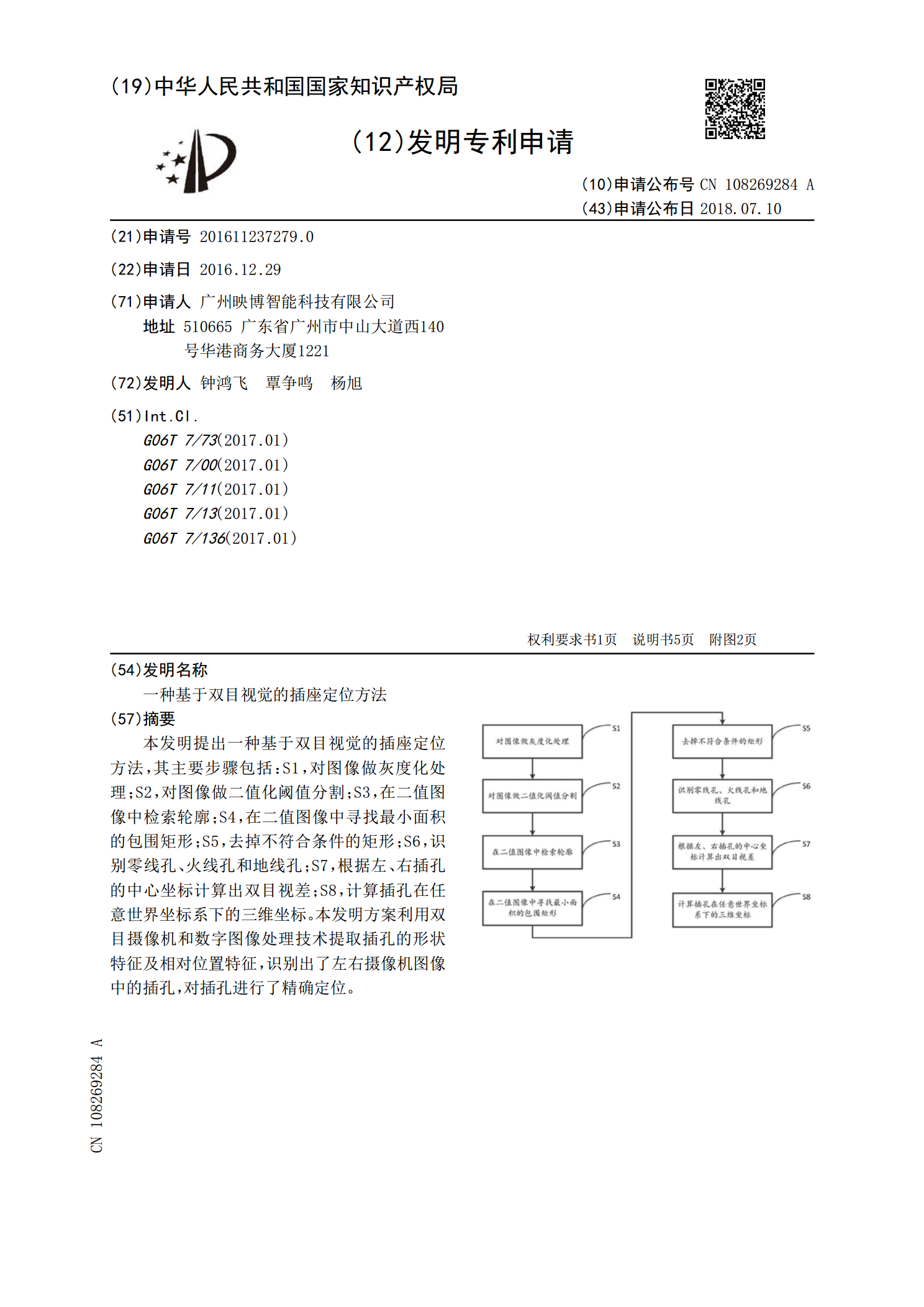
本发明提出一种基于双目视觉的插座定位方法,其主要步骤包括:S1,对图像做灰度化处理;S2,对图像做二值化阈值分割;S3,在二值图像中检索轮廓;S4,在二值图像中寻找最小面积的包围矩形;S5,去掉不符合条件的矩形;S6,识别零线孔、火线孔和地线孔;S7,根据左、右插孔的中心坐标计算出双目视差;S8,计算插孔在任意世界坐标系下的三维坐标。本发明方案利用双目摄像机和数字图像处理技术提取插孔的形状特征及相对位置特征,识别出了左右摄像机图像中的插孔,对插孔进行了精确定位。

一种基于双目视觉的定位方法及装置.pdf
本发明公开了一种基于双目视觉的定位方法及装置,应用于电力巡检机器人,方法包括以下步骤:分别采集场景的可见光图像和红外图像;分别对可见光图像和红外图像进行轮廓特征提取,获取第一轮廓特征和第二轮廓特征;分别对第一轮廓特征和第二轮廓特征进行SIFT特征提取,获取可见光图像SIFT特征点和红外图像SIFT特征点;将可见光图像SIFT特征点和红外图像SIFT特征点进行匹配,校准可见光图像SIFT特征点和红外图像SIFT特征点位置,将可见光图像和红外图像进行融合,得到融合后的融合图像;通过将所述融合图像进行模板匹配,

基于双目视觉的快速定位与测距方法.docx
基于双目视觉的快速定位与测距方法基于双目视觉的快速定位与测距方法摘要:随着机器视觉的快速发展,双目视觉作为一种常用的三维测量方法,被广泛应用于机器人导航、图像重建等领域。本文所研究的基于双目视觉的快速定位与测距方法,旨在实现对空间目标的快速定位和测量。使用两个相机进行双目视觉系统的构建,并通过计算得到目标的位置和距离。本文通过介绍双目视觉的原理及其重要性,详细阐述了基于双目视觉的快速定位与测距方法的步骤和技术,包括图像采集与预处理、特征提取与匹配等。最后,通过实验验证了该方法的可行性和准确性。关键词:双目
一种基于双目视觉的工件识别和定位方法.pdf
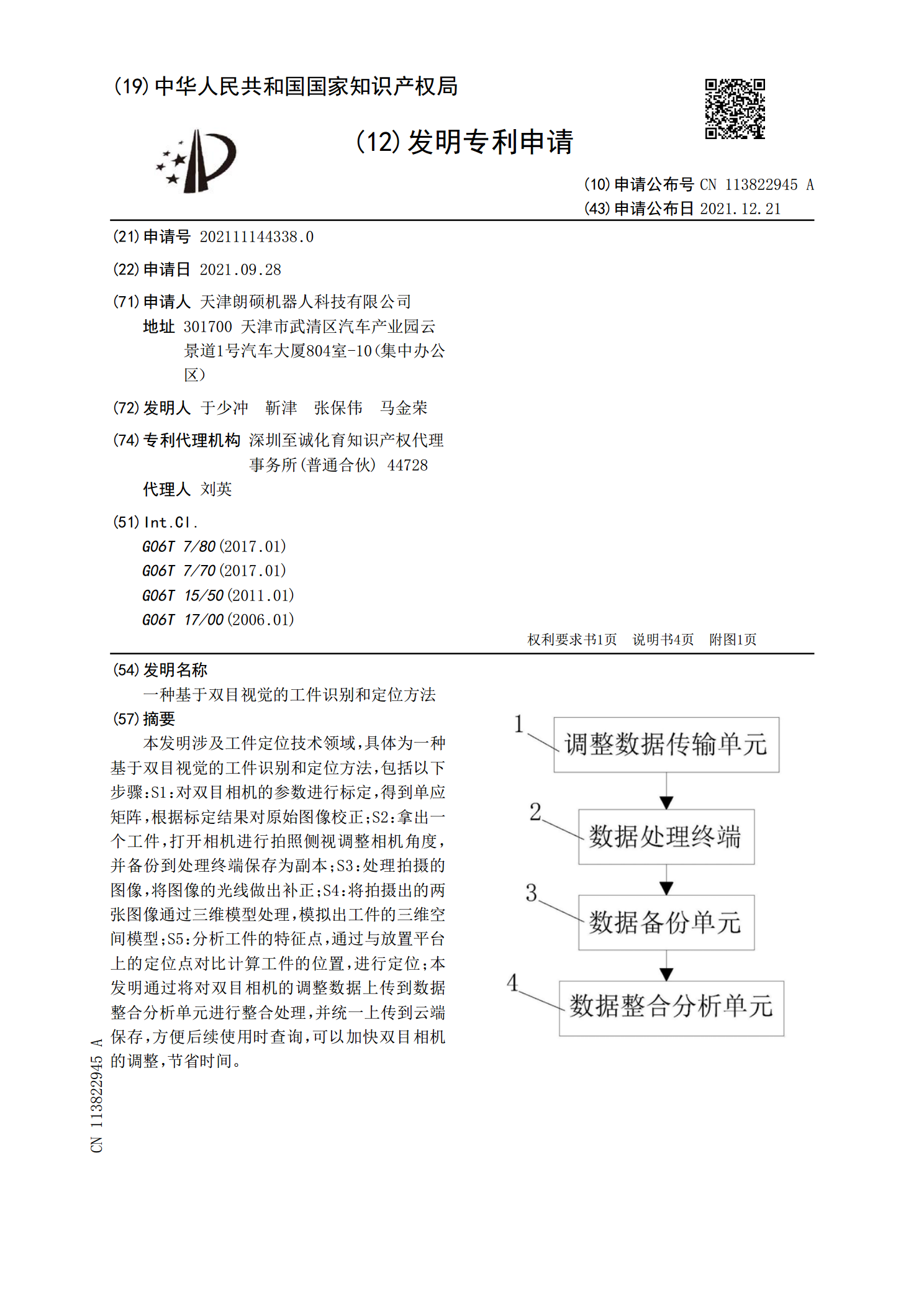
本发明涉及工件定位技术领域,具体为一种基于双目视觉的工件识别和定位方法,包括以下步骤:S1:对双目相机的参数进行标定,得到单应矩阵,根据标定结果对原始图像校正;S2:拿出一个工件,打开相机进行拍照侧视调整相机角度,并备份到处理终端保存为副本;S3:处理拍摄的图像,将图像的光线做出补正;S4:将拍摄出的两张图像通过三维模型处理,模拟出工件的三维空间模型;S5:分析工件的特征点,通过与放置平台上的定位点对比计算工件的位置,进行定位;本发明通过将对双目相机的调整数据上传到数据整合分析单元进行整合处理,并统一上传
基于logo的双目视觉室内定位方法.pdf
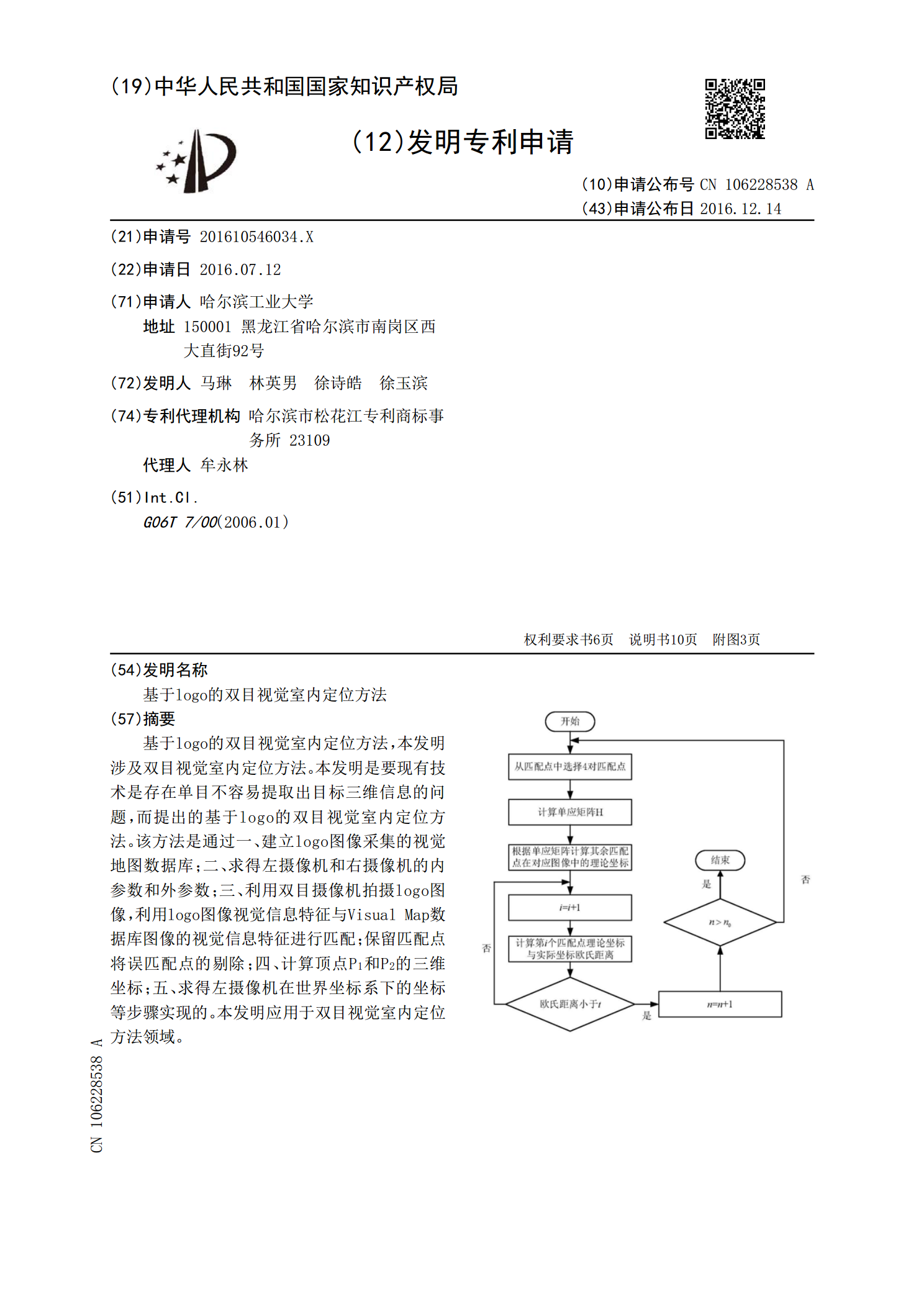
基于logo的双目视觉室内定位方法,本发明涉及双目视觉室内定位方法。本发明是要现有技术是存在单目不容易提取出目标三维信息的问题,而提出的基于logo的双目视觉室内定位方法。该方法是通过一、建立logo图像采集的视觉地图数据库;二、求得左摄像机和右摄像机的内参数和外参数;三、利用双目摄像机拍摄logo图像,利用logo图像视觉信息特征与VisualMap数据库图像的视觉信息特征进行匹配;保留匹配点将误匹配点的剔除;四、计算顶点P