
一种基于双目视觉的定位方法及装置.pdf

Ma****57

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于双目视觉的定位方法及装置.pdf
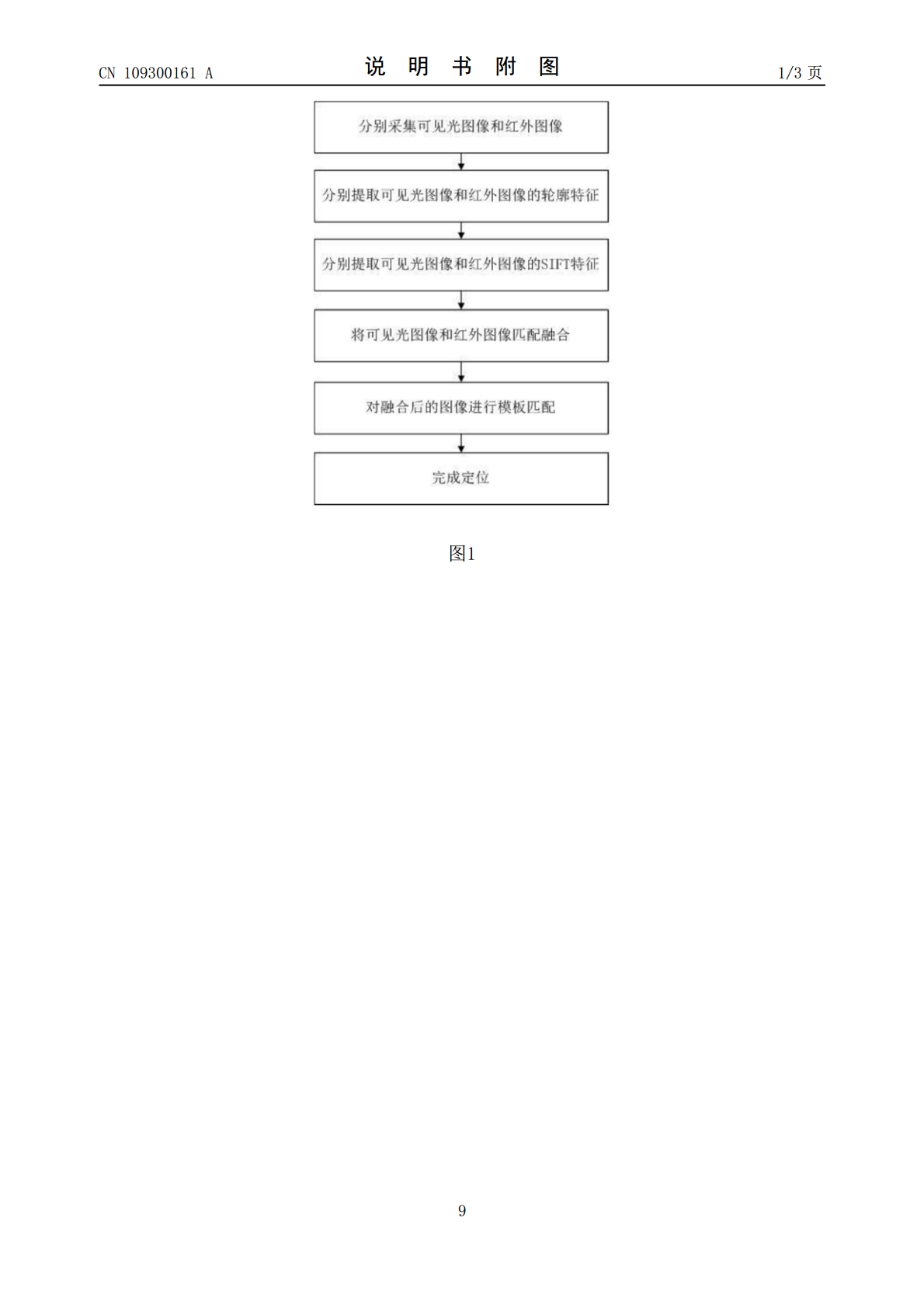
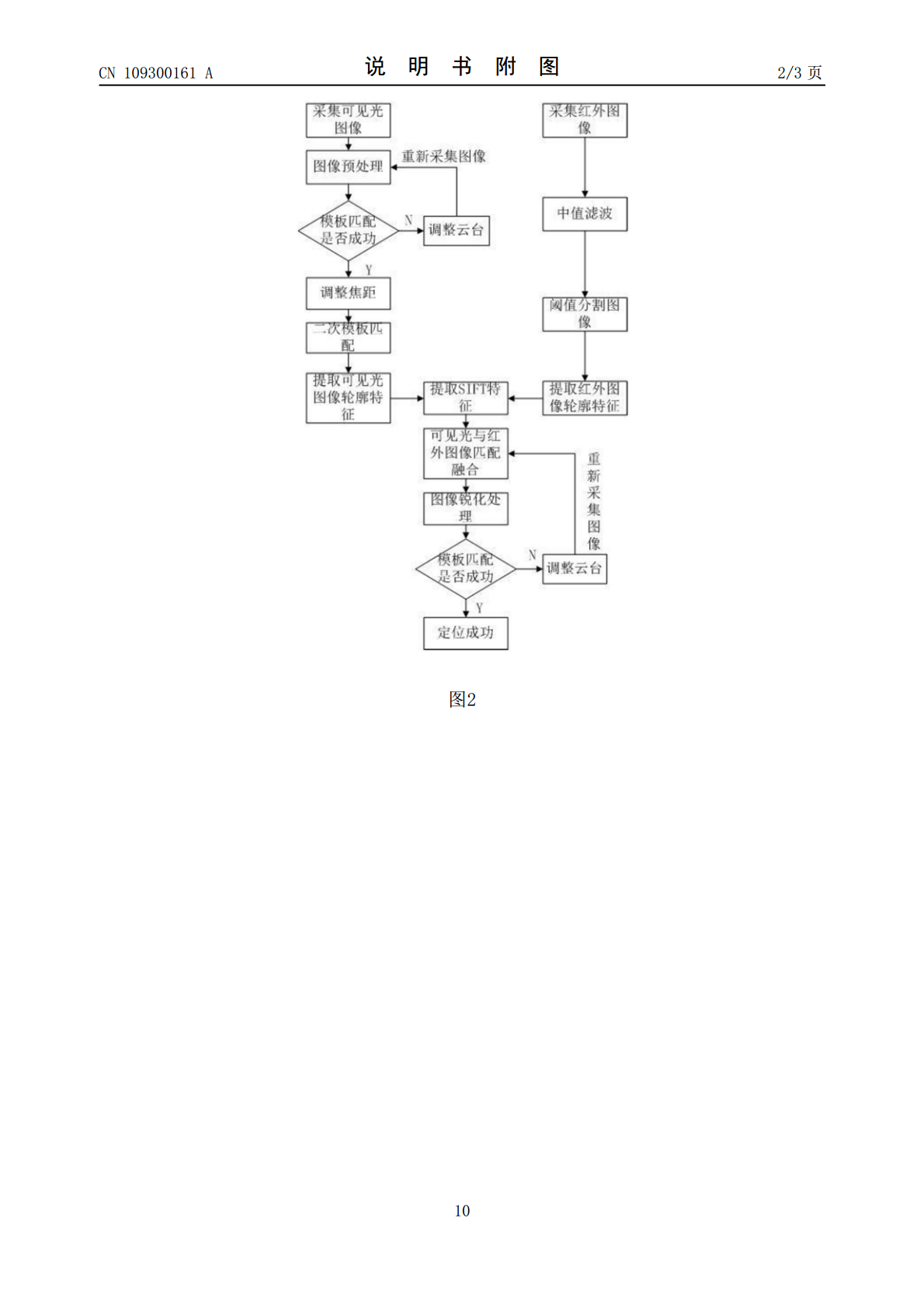
本发明公开了一种基于双目视觉的定位方法及装置,应用于电力巡检机器人,方法包括以下步骤:分别采集场景的可见光图像和红外图像;分别对可见光图像和红外图像进行轮廓特征提取,获取第一轮廓特征和第二轮廓特征;分别对第一轮廓特征和第二轮廓特征进行SIFT特征提取,获取可见光图像SIFT特征点和红外图像SIFT特征点;将可见光图像SIFT特征点和红外图像SIFT特征点进行匹配,校准可见光图像SIFT特征点和红外图像SIFT特征点位置,将可见光图像和红外图像进行融合,得到融合后的融合图像;通过将所述融合图像进行模板匹配,
一种基于双目视觉识别技术的骨刀定位装置及方法.pdf
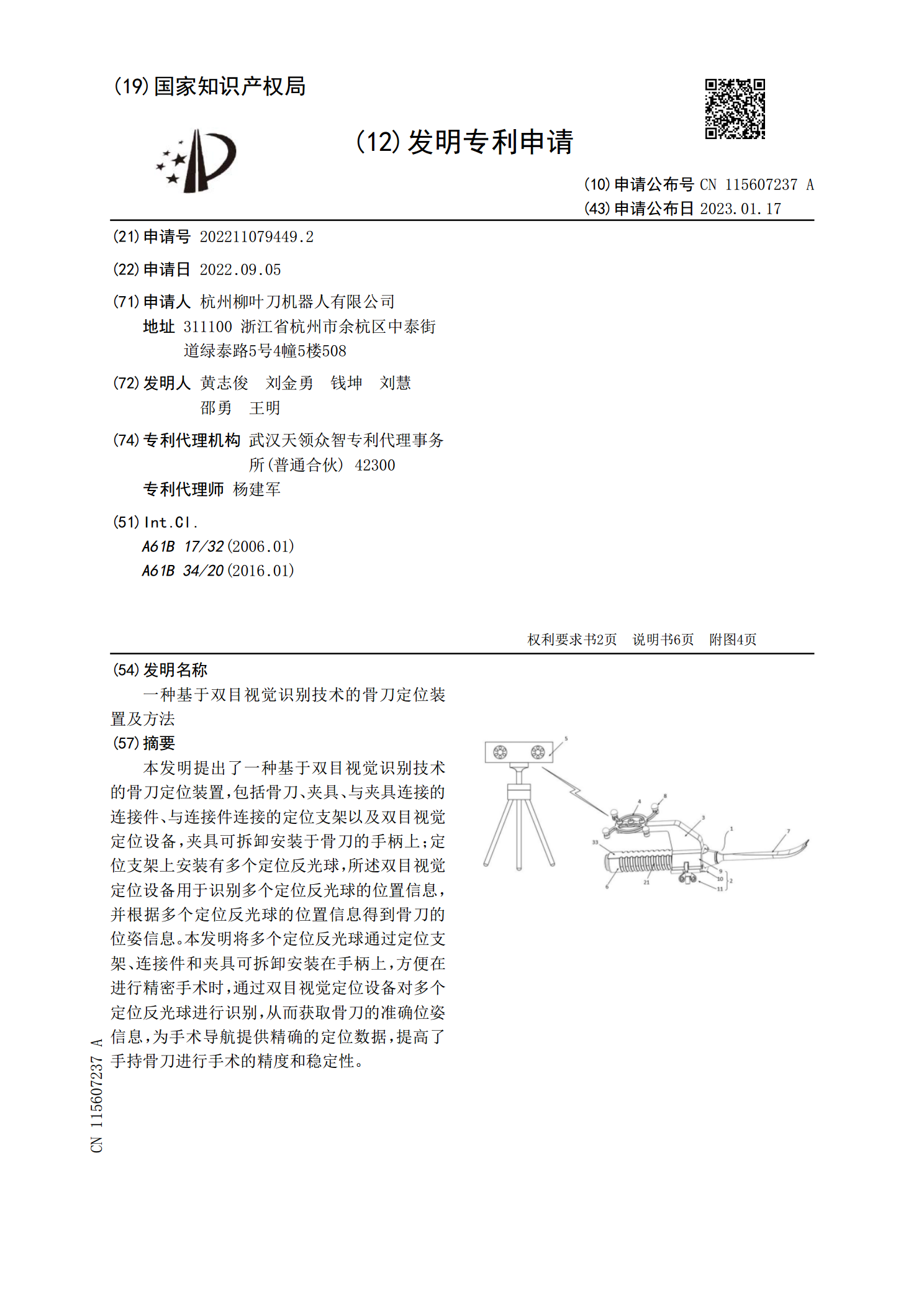
本发明提出了一种基于双目视觉识别技术的骨刀定位装置,包括骨刀、夹具、与夹具连接的连接件、与连接件连接的定位支架以及双目视觉定位设备,夹具可拆卸安装于骨刀的手柄上;定位支架上安装有多个定位反光球,所述双目视觉定位设备用于识别多个定位反光球的位置信息,并根据多个定位反光球的位置信息得到骨刀的位姿信息。本发明将多个定位反光球通过定位支架、连接件和夹具可拆卸安装在手柄上,方便在进行精密手术时,通过双目视觉定位设备对多个定位反光球进行识别,从而获取骨刀的准确位姿信息,为手术导航提供精确的定位数据,提高了手持骨刀进行
一种基于双目视觉的插座定位方法.pdf
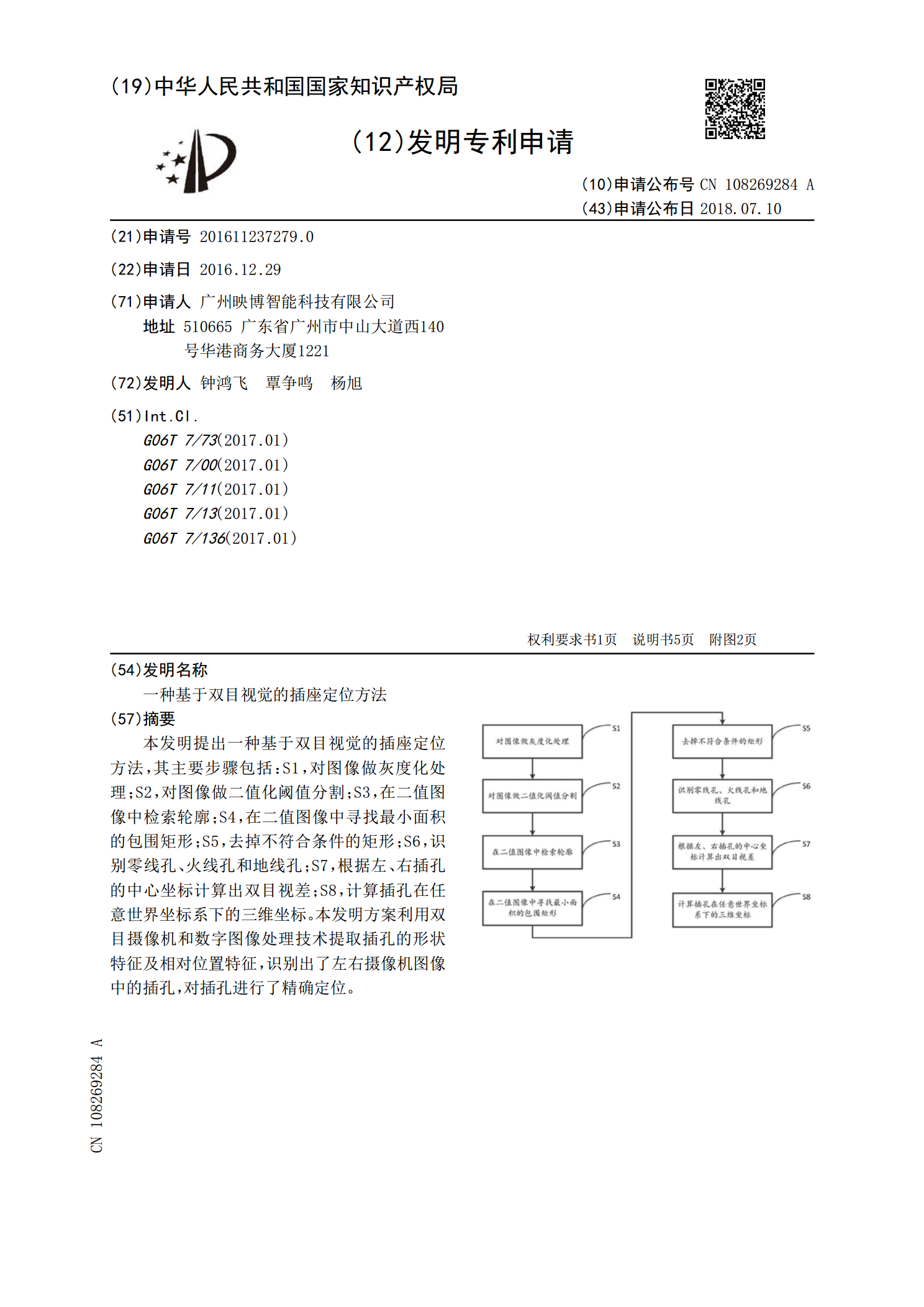
本发明提出一种基于双目视觉的插座定位方法,其主要步骤包括:S1,对图像做灰度化处理;S2,对图像做二值化阈值分割;S3,在二值图像中检索轮廓;S4,在二值图像中寻找最小面积的包围矩形;S5,去掉不符合条件的矩形;S6,识别零线孔、火线孔和地线孔;S7,根据左、右插孔的中心坐标计算出双目视差;S8,计算插孔在任意世界坐标系下的三维坐标。本发明方案利用双目摄像机和数字图像处理技术提取插孔的形状特征及相对位置特征,识别出了左右摄像机图像中的插孔,对插孔进行了精确定位。

一种基于双目视觉在人体体表定位测量骨骼位置的装置及方法.pdf
本发明提供了基于双目视觉在人体体表定位测量骨骼位置的装置及方法,包括标靶外壳,在标靶外壳上的第一壁面设置有至少三个反光标记点,在垂直于反光标记点所在壁面的第二壁面设置有杆体,杆体与第二壁面垂直,在杆体端部固定设置有探头,在标靶外壳上设置有两个第一激光发射器,第一激光发射器发出的激光束与杆体平行,其方法采用了该装置。本发明具有定位精度高,结构简单,重复性好等优点。
基于双目视觉系统的果实定位方法和装置.pdf
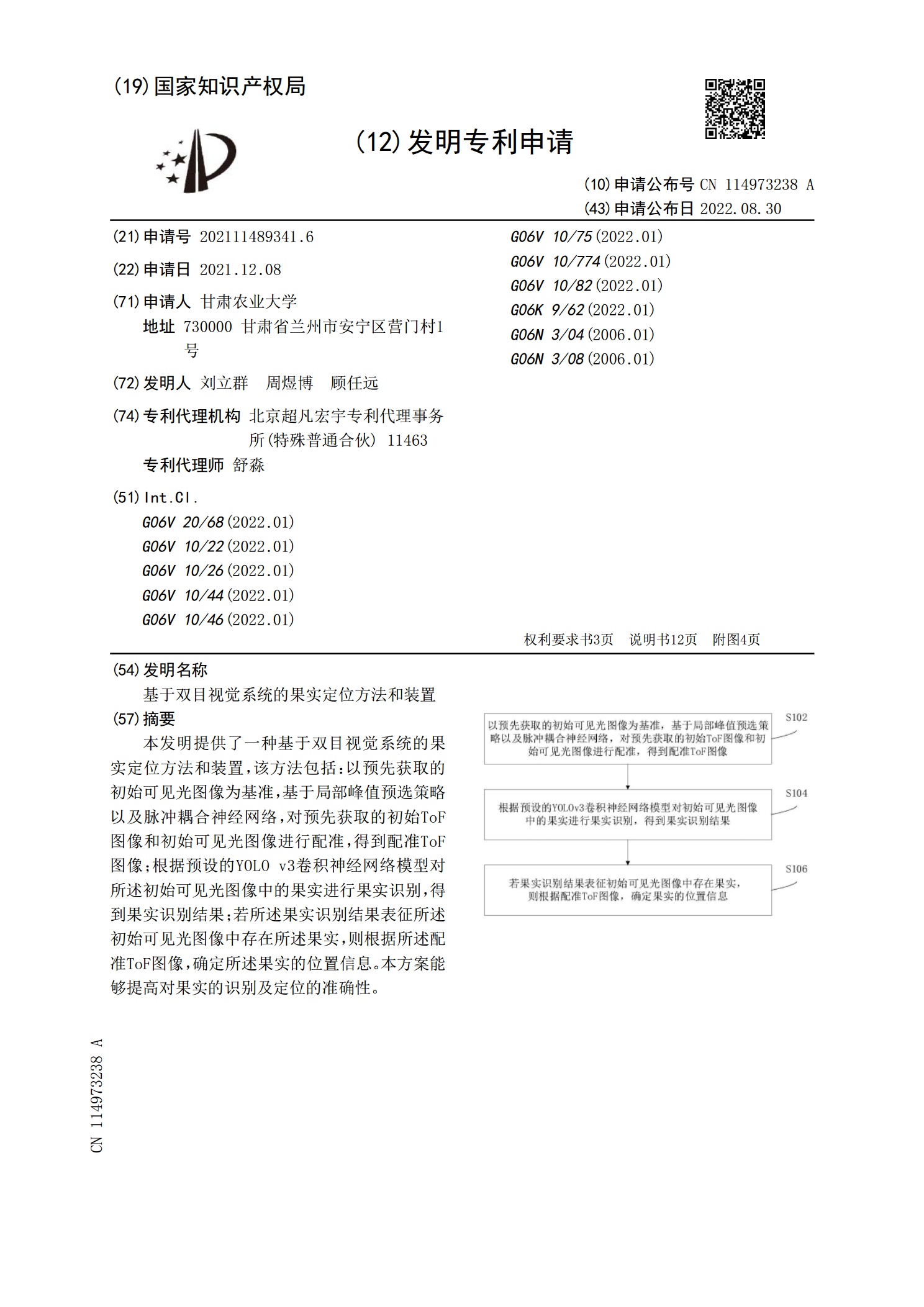
本发明提供了一种基于双目视觉系统的果实定位方法和装置,该方法包括:以预先获取的初始可见光图像为基准,基于局部峰值预选策略以及脉冲耦合神经网络,对预先获取的初始ToF图像和初始可见光图像进行配准,得到配准ToF图像;根据预设的YOLOv3卷积神经网络模型对所述初始可见光图像中的果实进行果实识别,得到果实识别结果;若所述果实识别结果表征所述初始可见光图像中存在所述果实,则根据所述配准ToF图像,确定所述果实的位置信息。本方案能够提高对果实的识别及定位的准确性。