
基于logo的双目视觉室内定位方法.pdf

代瑶****zy

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于logo的双目视觉室内定位方法.pdf
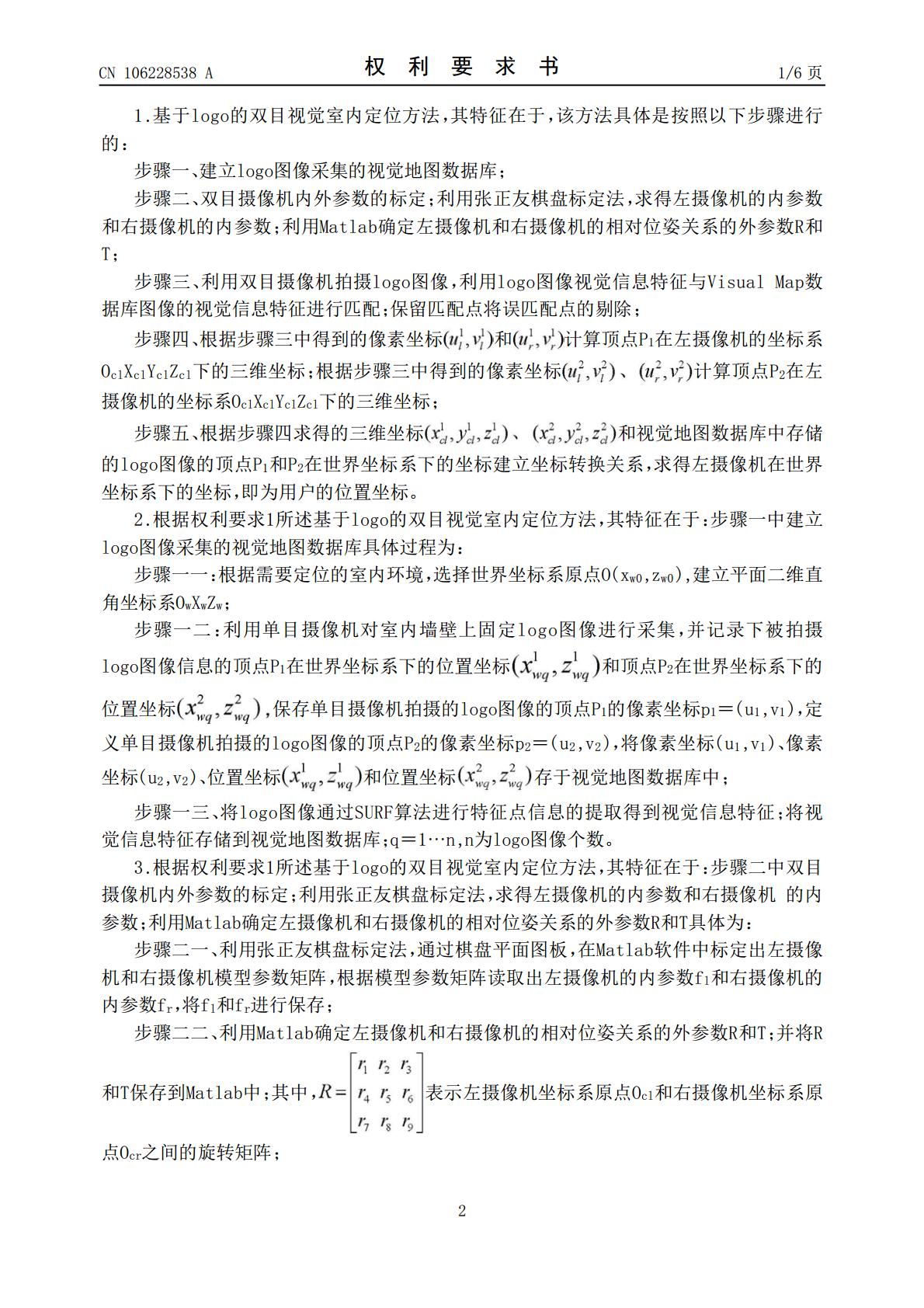
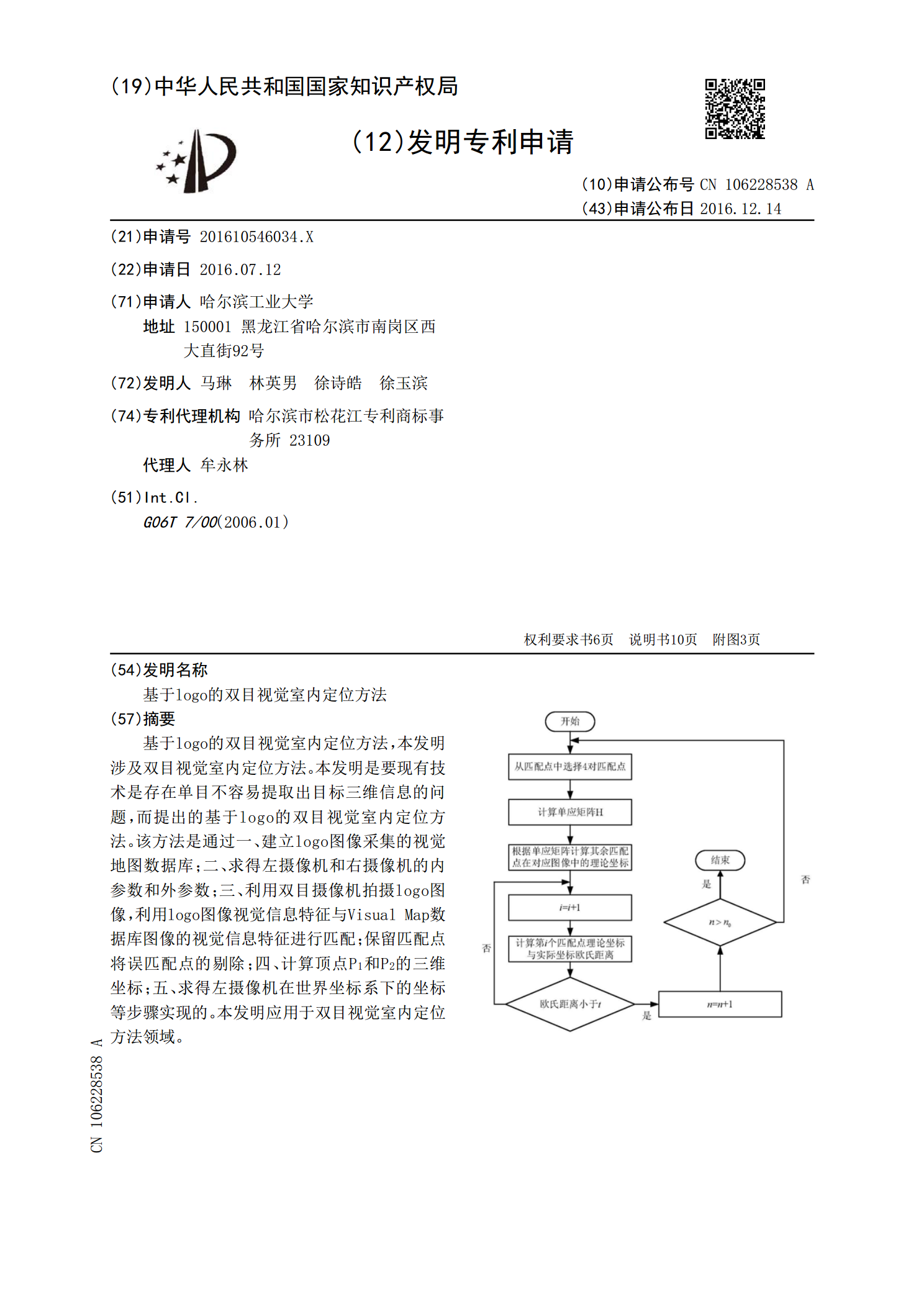
基于logo的双目视觉室内定位方法,本发明涉及双目视觉室内定位方法。本发明是要现有技术是存在单目不容易提取出目标三维信息的问题,而提出的基于logo的双目视觉室内定位方法。该方法是通过一、建立logo图像采集的视觉地图数据库;二、求得左摄像机和右摄像机的内参数和外参数;三、利用双目摄像机拍摄logo图像,利用logo图像视觉信息特征与VisualMap数据库图像的视觉信息特征进行匹配;保留匹配点将误匹配点的剔除;四、计算顶点P

基于双目视觉的快速定位与测距方法.docx
基于双目视觉的快速定位与测距方法基于双目视觉的快速定位与测距方法摘要:随着机器视觉的快速发展,双目视觉作为一种常用的三维测量方法,被广泛应用于机器人导航、图像重建等领域。本文所研究的基于双目视觉的快速定位与测距方法,旨在实现对空间目标的快速定位和测量。使用两个相机进行双目视觉系统的构建,并通过计算得到目标的位置和距离。本文通过介绍双目视觉的原理及其重要性,详细阐述了基于双目视觉的快速定位与测距方法的步骤和技术,包括图像采集与预处理、特征提取与匹配等。最后,通过实验验证了该方法的可行性和准确性。关键词:双目

基于双目视觉的无人机室内定位研究.docx
基于双目视觉的无人机室内定位研究基于双目视觉的无人机室内定位研究摘要:随着无人机的不断发展与应用,无人机室内定位成为一个备受关注的研究领域。传统的GPS等定位系统在室内环境下往往无法提供准确的定位信息。因此,基于双目视觉的无人机室内定位技术应运而生。本论文旨在通过对基于双目视觉的无人机室内定位技术进行综述,并对其优缺点进行分析和讨论,为后续研究提供参考。关键词:无人机、室内定位、双目视觉、定位精度、优缺点1.序言无人机的广泛应用促使人们对其室内定位技术的需求。然而,室内环境的复杂性使得传统的定位系统在此场
基于双目视觉的葡萄识别定位及跟踪方法研究.pptx
汇报人:目录PARTONEPARTTWO葡萄产业的重要性传统葡萄识别方法的局限性双目视觉技术的优势研究目的与意义PARTTHREE双目立体视觉基本原理图像获取与预处理特征提取与匹配三维重建与葡萄识别PARTFOUR基于颜色特征的葡萄区域分割基于形状特征的葡萄候选区域筛选葡萄精确位置的确定实验结果与分析PARTFIVE葡萄跟踪框架的构建葡萄运动轨迹的预测葡萄遮挡与消失的处理实验结果与分析PARTSIX基于双目视觉的葡萄识别定位及跟踪系统实现系统性能评估与优化技术推广与实际应用前景面临的挑战与展望PARTSE
一种基于双目视觉的插座定位方法.pdf
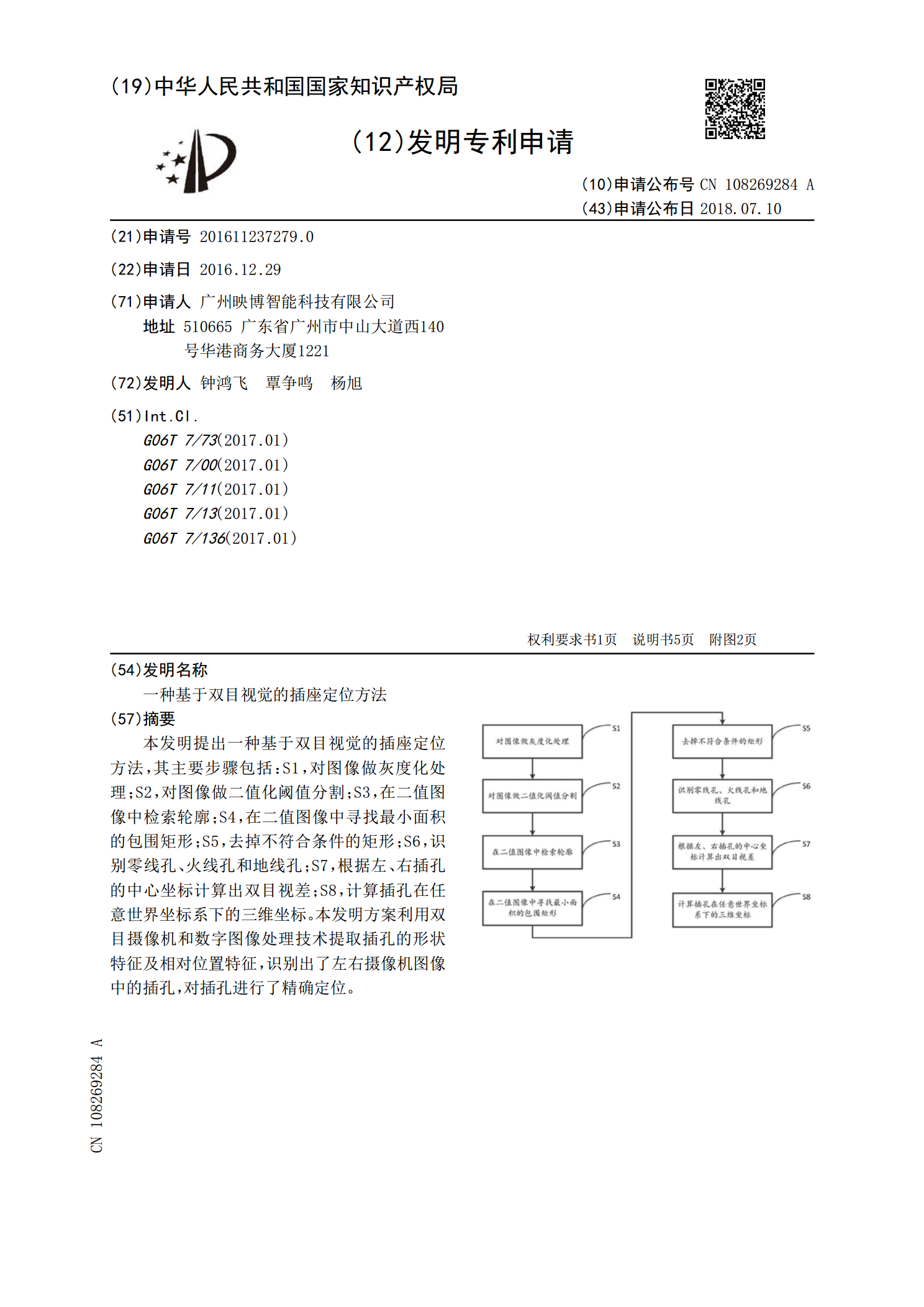
本发明提出一种基于双目视觉的插座定位方法,其主要步骤包括:S1,对图像做灰度化处理;S2,对图像做二值化阈值分割;S3,在二值图像中检索轮廓;S4,在二值图像中寻找最小面积的包围矩形;S5,去掉不符合条件的矩形;S6,识别零线孔、火线孔和地线孔;S7,根据左、右插孔的中心坐标计算出双目视差;S8,计算插孔在任意世界坐标系下的三维坐标。本发明方案利用双目摄像机和数字图像处理技术提取插孔的形状特征及相对位置特征,识别出了左右摄像机图像中的插孔,对插孔进行了精确定位。