
一种AGV小车的定位装置及定位方法.pdf

邻家****ng


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种AGV小车的定位装置及定位方法.pdf
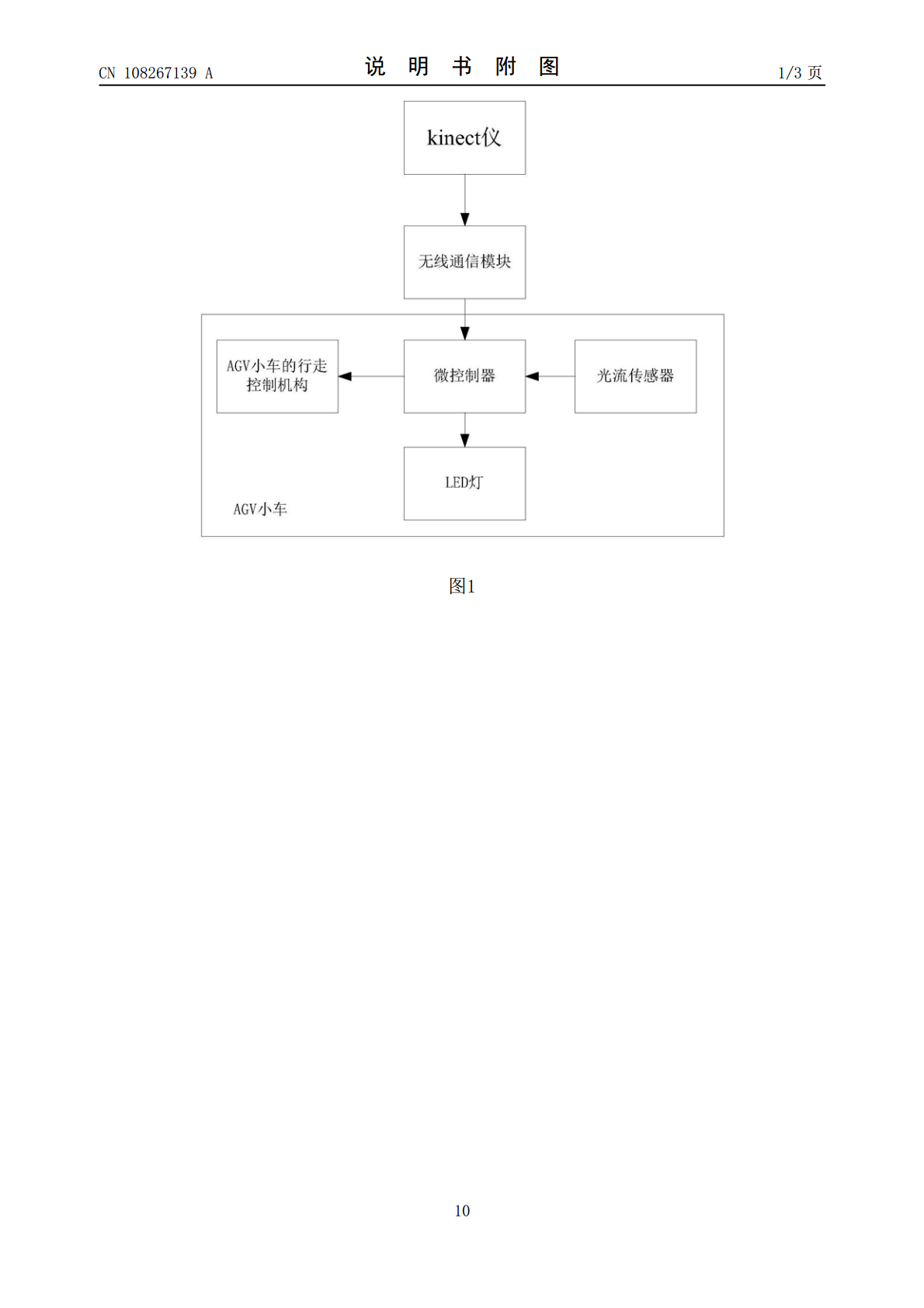
本发明公开了一种AGV小车的定位装置及定位方法,包括AGV小车行走轨迹设定装置以及分别设置在AGV小车上的微控制器和光流传感器;AGV小车行走轨迹设定装置通过无线通信模块连接AGV小车上的微控制器;AGV小车上的光流传感器和其上的微控制器连接,AGV小车上的微控制器连接AGV小车的行走控制机构,用于根据AGV小车行走轨迹得出AGV小车需要行走的位移量,并且用于对光流传感器检测的AGV小车实际位移量和AGV小车需要行走的位移量进行比较,根据比较结果调节AGV小车左右轮的行走速度。本发明可以大大提高AGV小车
AGV小车的定位系统及其定位方法.pdf
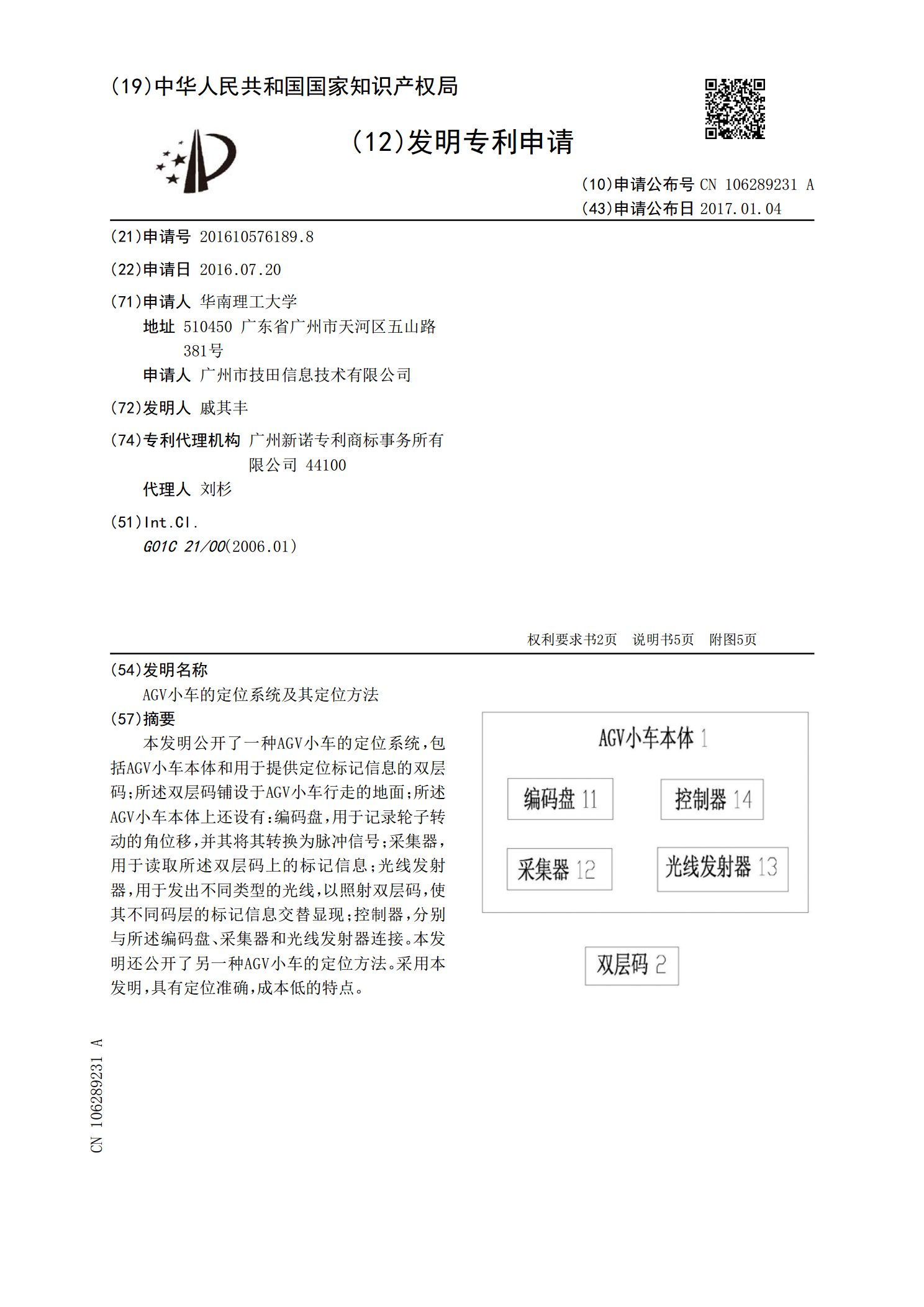
本发明公开了一种AGV小车的定位系统,包括AGV小车本体和用于提供定位标记信息的双层码;所述双层码铺设于AGV小车行走的地面;所述AGV小车本体上还设有:编码盘,用于记录轮子转动的角位移,并其将其转换为脉冲信号;采集器,用于读取所述双层码上的标记信息;光线发射器,用于发出不同类型的光线,以照射双层码,使其不同码层的标记信息交替显现;控制器,分别与所述编码盘、采集器和光线发射器连接。本发明还公开了另一种AGV小车的定位方法。采用本发明,具有定位准确,成本低的特点。
一种基于AGV小车的对接定位校准方法及AGV小车.pdf
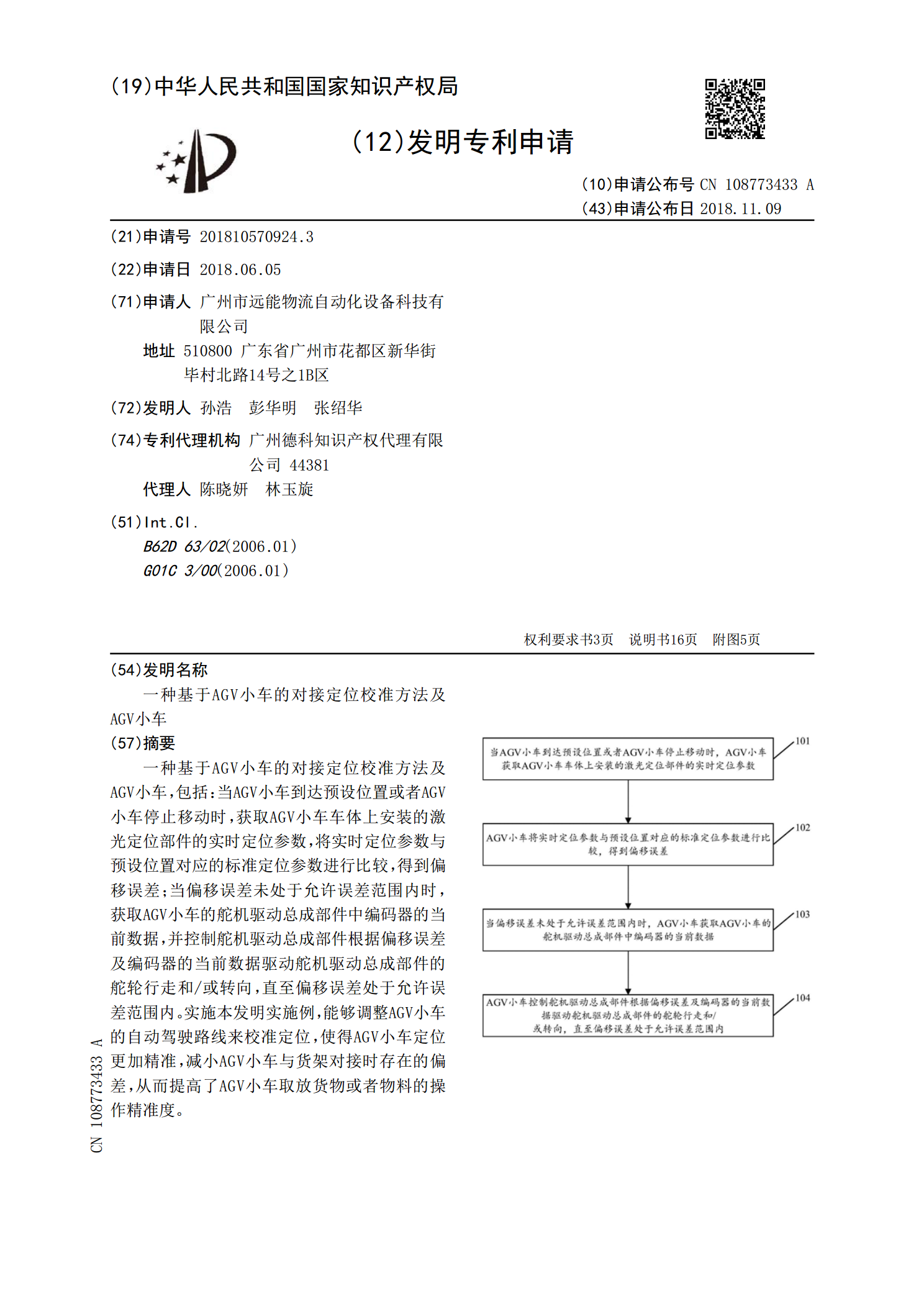
一种基于AGV小车的对接定位校准方法及AGV小车,包括:当AGV小车到达预设位置或者AGV小车停止移动时,获取AGV小车车体上安装的激光定位部件的实时定位参数,将实时定位参数与预设位置对应的标准定位参数进行比较,得到偏移误差;当偏移误差未处于允许误差范围内时,获取AGV小车的舵机驱动总成部件中编码器的当前数据,并控制舵机驱动总成部件根据偏移误差及编码器的当前数据驱动舵机驱动总成部件的舵轮行走和/或转向,直至偏移误差处于允许误差范围内。实施本发明实施例,能够调整AGV小车的自动驾驶路线来校准定位,使得AGV

一种用于AGV小车的短时精确定位的装置及方法.pdf
本发明属于AGV小车的定位技术领域,并公开了一种用于AGV小车的精确定位装置及其短时精确定位方法,该装置包括安装在AGV小车车轮上的左前轮驱动计数装置、左侧转向驱动计数装置、右前轮驱动计数装置、右侧转向驱动计数装置和地磁方向传感器,该方法包括以下步骤:1)将时长T等分为n份;2)判断小车是进行直线运动还是转向运动,以获得相对位移坐标值(ΔPx
定位准确的AGV小车.pdf
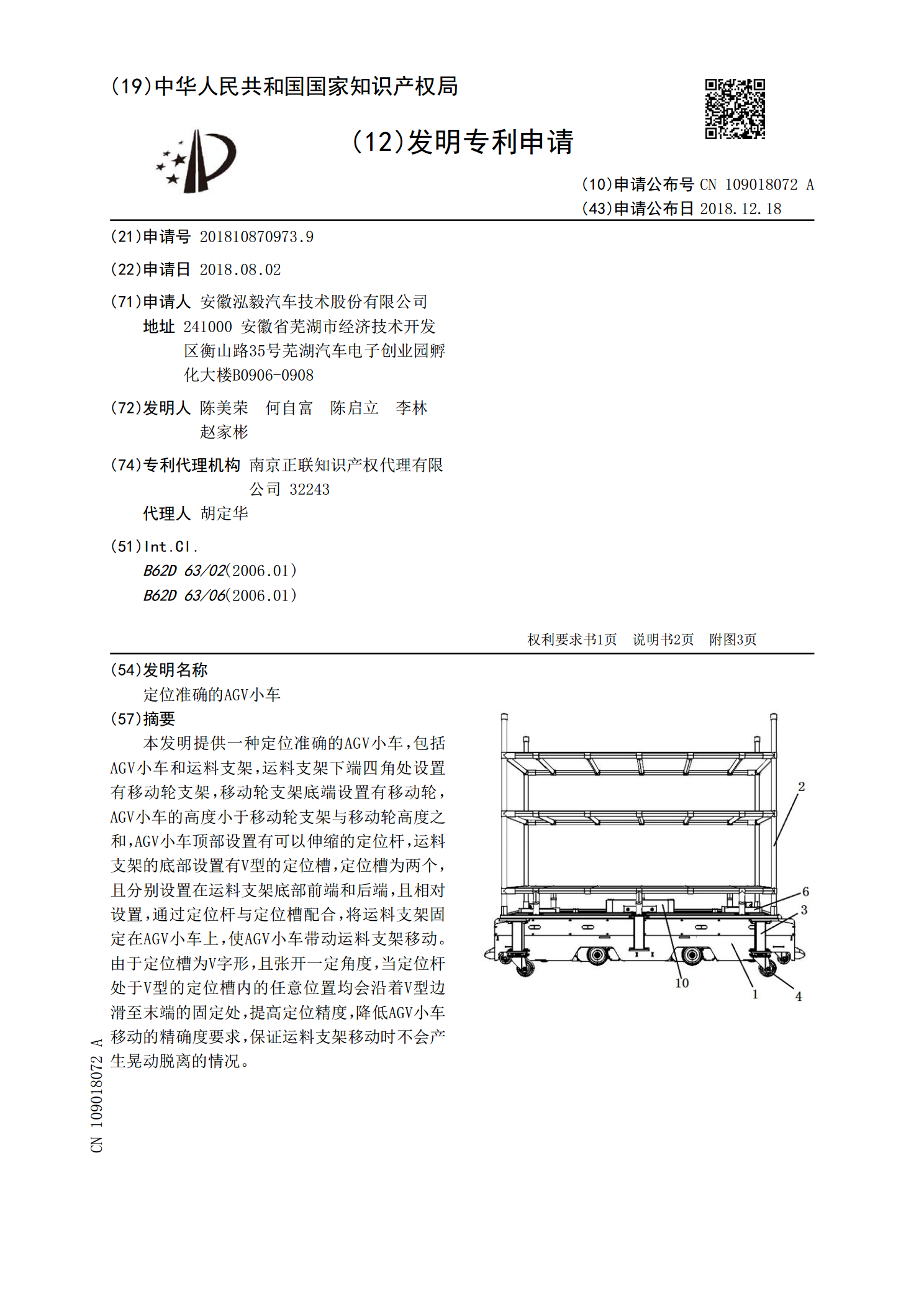
本发明提供一种定位准确的AGV小车,包括AGV小车和运料支架,运料支架下端四角处设置有移动轮支架,移动轮支架底端设置有移动轮,AGV小车的高度小于移动轮支架与移动轮高度之和,AGV小车顶部设置有可以伸缩的定位杆,运料支架的底部设置有V型的定位槽,定位槽为两个,且分别设置在运料支架底部前端和后端,且相对设置,通过定位杆与定位槽配合,将运料支架固定在AGV小车上,使AGV小车带动运料支架移动。由于定位槽为V字形,且张开一定角度,当定位杆处于V型的定位槽内的任意位置均会沿着V型边滑至末端的固定处,提高定位精度,