
一种水陆空三栖作业装置及其工作原理.pdf

Th****84

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水陆空三栖作业装置及其工作原理.pdf
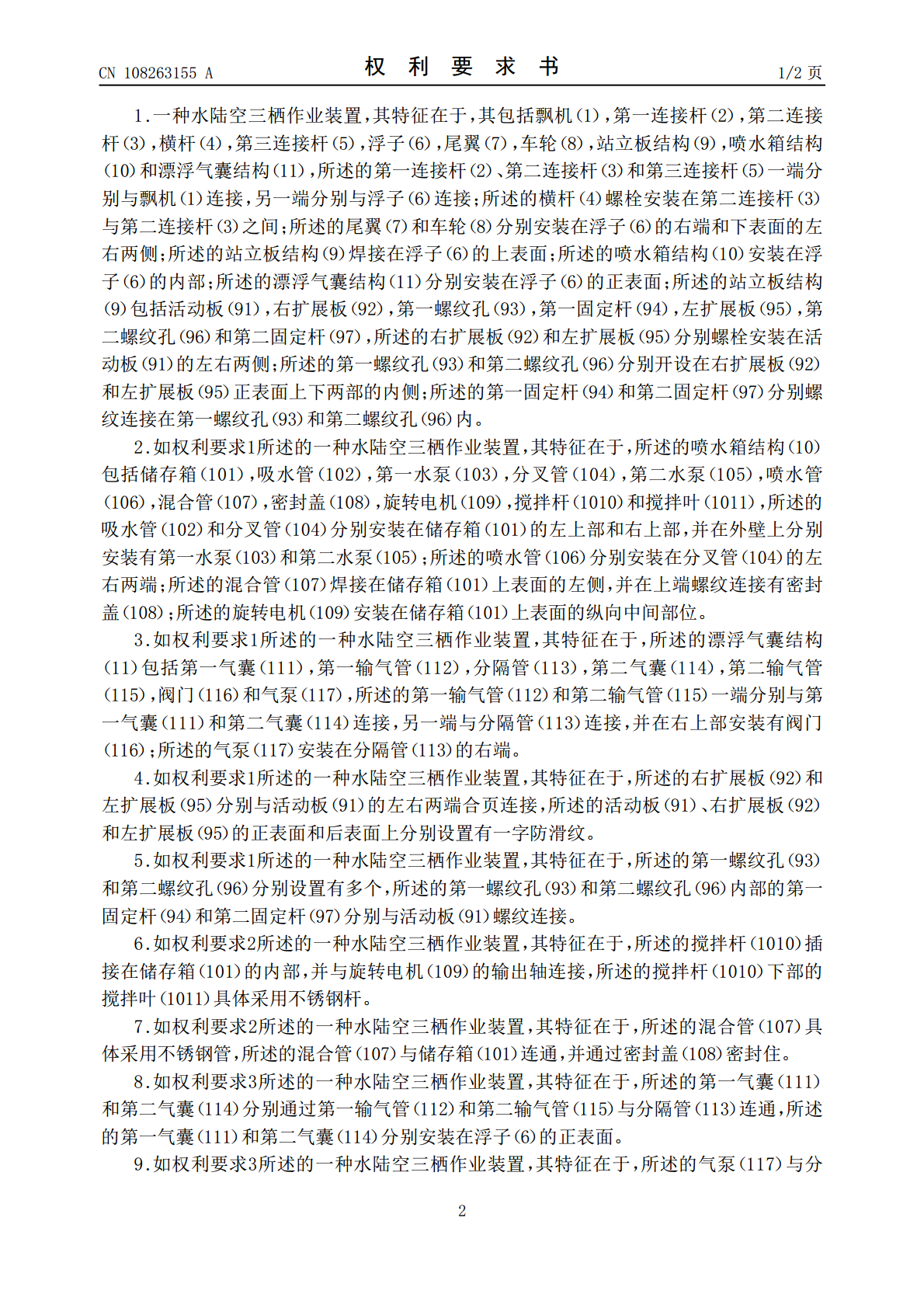
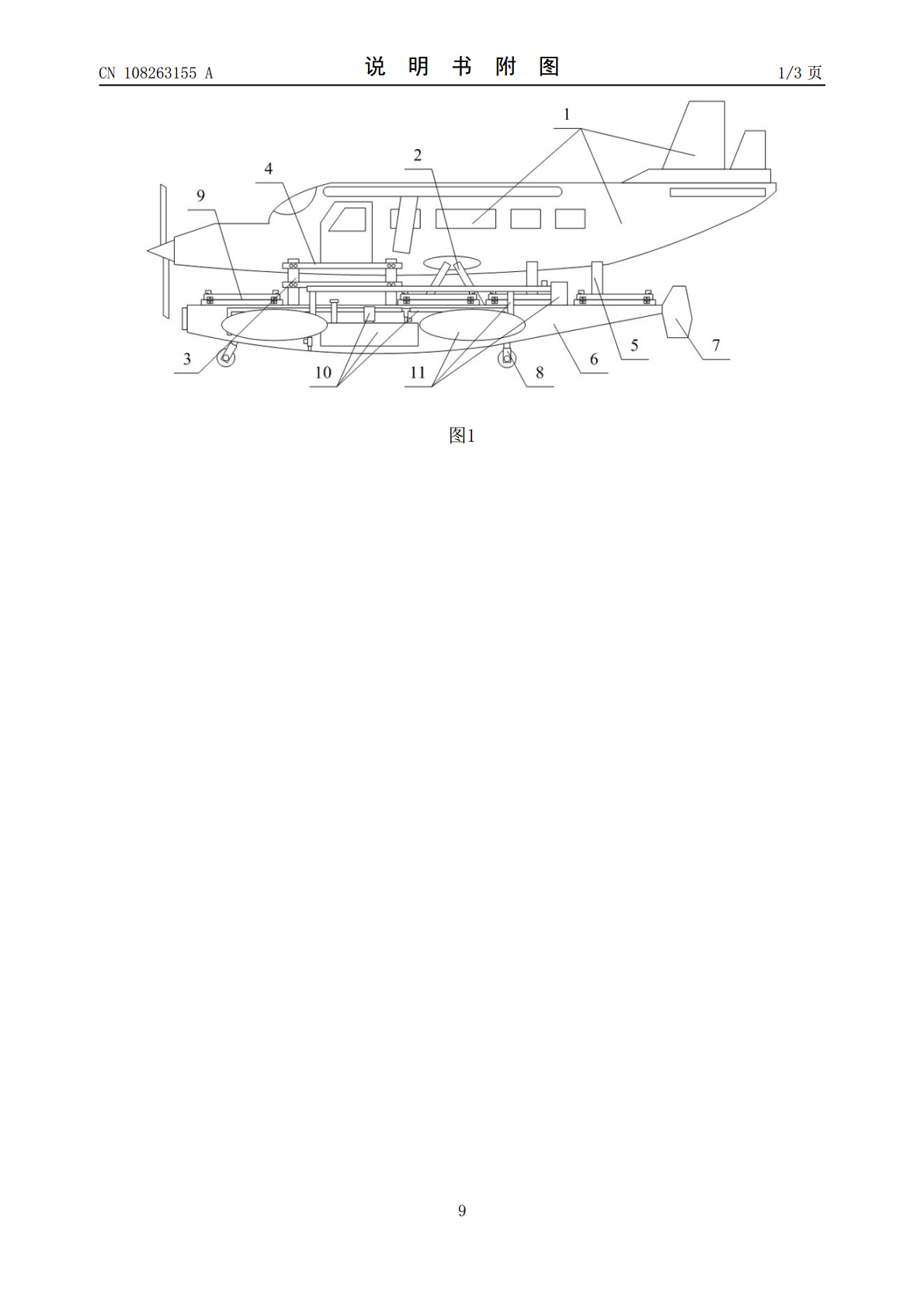
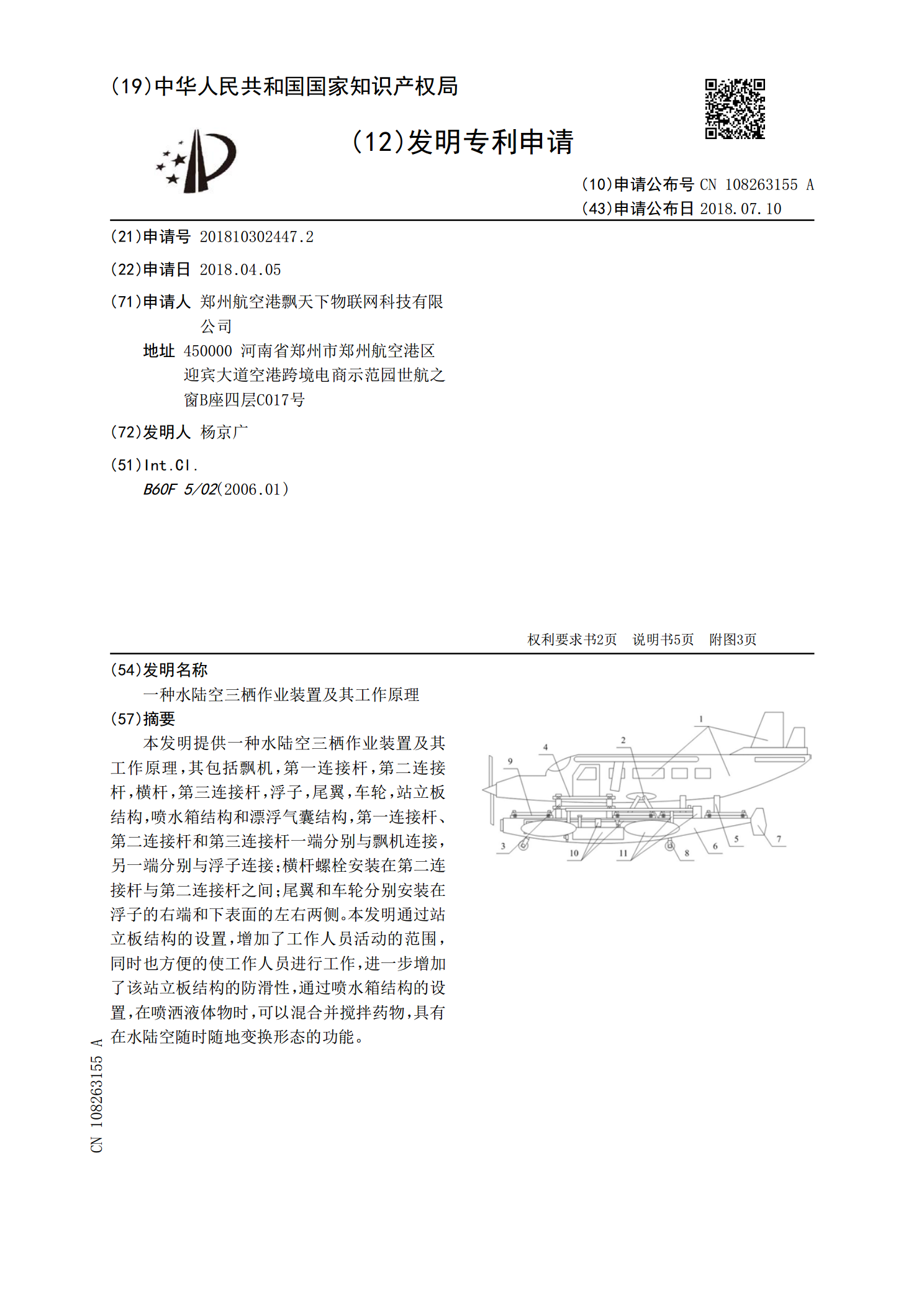
本发明提供一种水陆空三栖作业装置及其工作原理,其包括飘机,第一连接杆,第二连接杆,横杆,第三连接杆,浮子,尾翼,车轮,站立板结构,喷水箱结构和漂浮气囊结构,第一连接杆、第二连接杆和第三连接杆一端分别与飘机连接,另一端分别与浮子连接;横杆螺栓安装在第二连接杆与第二连接杆之间;尾翼和车轮分别安装在浮子的右端和下表面的左右两侧。本发明通过站立板结构的设置,增加了工作人员活动的范围,同时也方便的使工作人员进行工作,进一步增加了该站立板结构的防滑性,通过喷水箱结构的设置,在喷洒液体物时,可以混合并搅拌药物,具有在水

一种水陆空三栖无人侦查装置.pdf
一种水陆空三栖无人侦查装置,当在陆地上时,机身为两相互对称结构,两者通过中间的铰链连接;机身的竖向截面为倒梯形结构,机身底部和顶部与地面平行;机身的周边对称设有四个皮带盒,皮带盒通过电极轴与转轮连接;机身、皮带盒、转轮三者共同组成该侦查装置的主体结构。在飞行或者水上状态中,尾翼板a、尾翼板b随铰链沿垂直地面方向转动90°,二者组成该装置的尾翼,用以调整控制装置的方向;驱动电机停止转动,传动带a、传动带b、传动带c停止转动。液压系统各控制阀的方向控制及各杆件控制、驱动电机、涵道电机开断、螺旋插接式螺旋桨的通
一种微型水陆空三栖运载装置.pdf
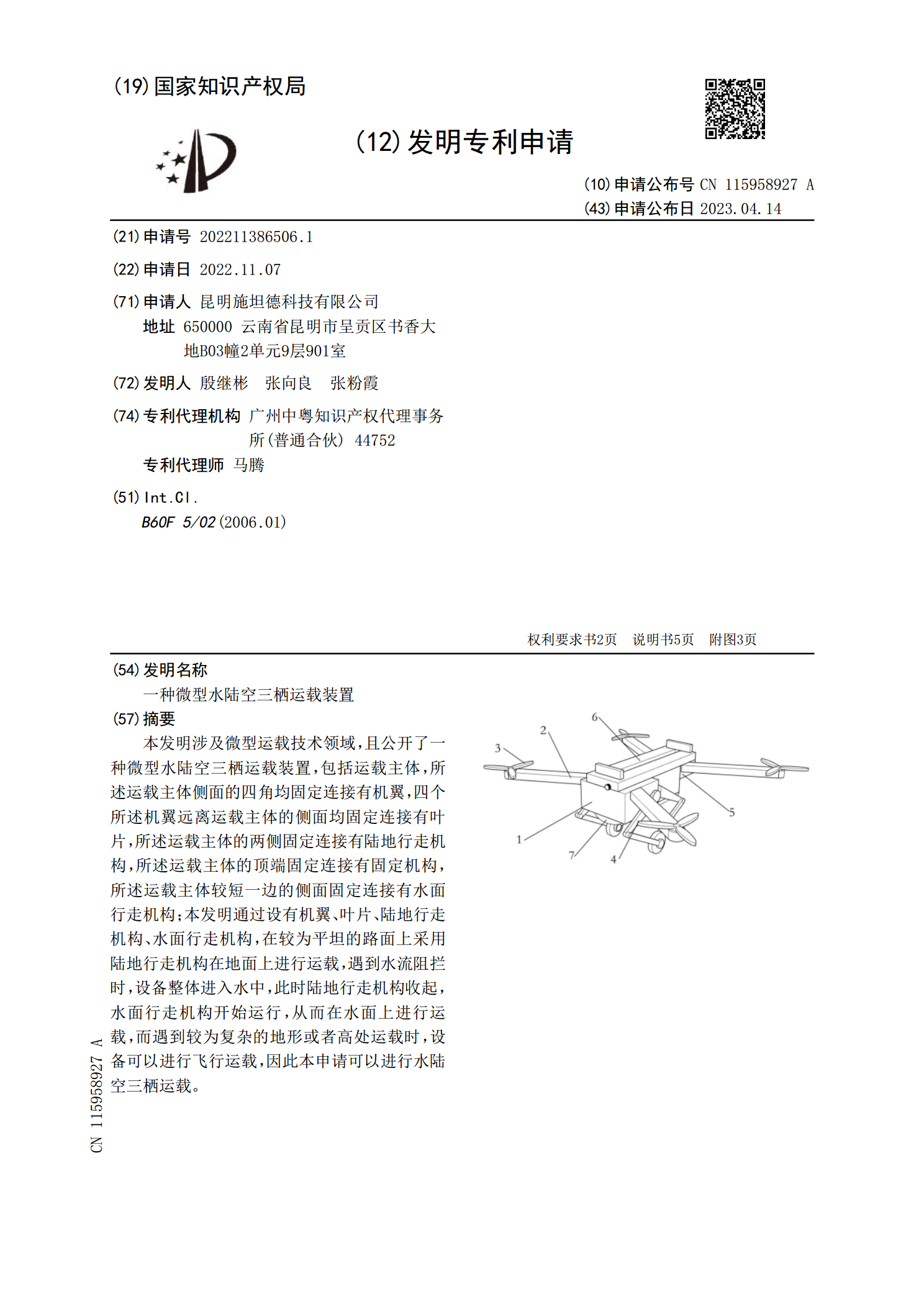
本发明涉及微型运载技术领域,且公开了一种微型水陆空三栖运载装置,包括运载主体,所述运载主体侧面的四角均固定连接有机翼,四个所述机翼远离运载主体的侧面均固定连接有叶片,所述运载主体的两侧固定连接有陆地行走机构,所述运载主体的顶端固定连接有固定机构,所述运载主体较短一边的侧面固定连接有水面行走机构;本发明通过设有机翼、叶片、陆地行走机构、水面行走机构,在较为平坦的路面上采用陆地行走机构在地面上进行运载,遇到水流阻拦时,设备整体进入水中,此时陆地行走机构收起,水面行走机构开始运行,从而在水面上进行运载,而遇到较
一种水陆空三栖旋翼机器人及其工作方法.pdf
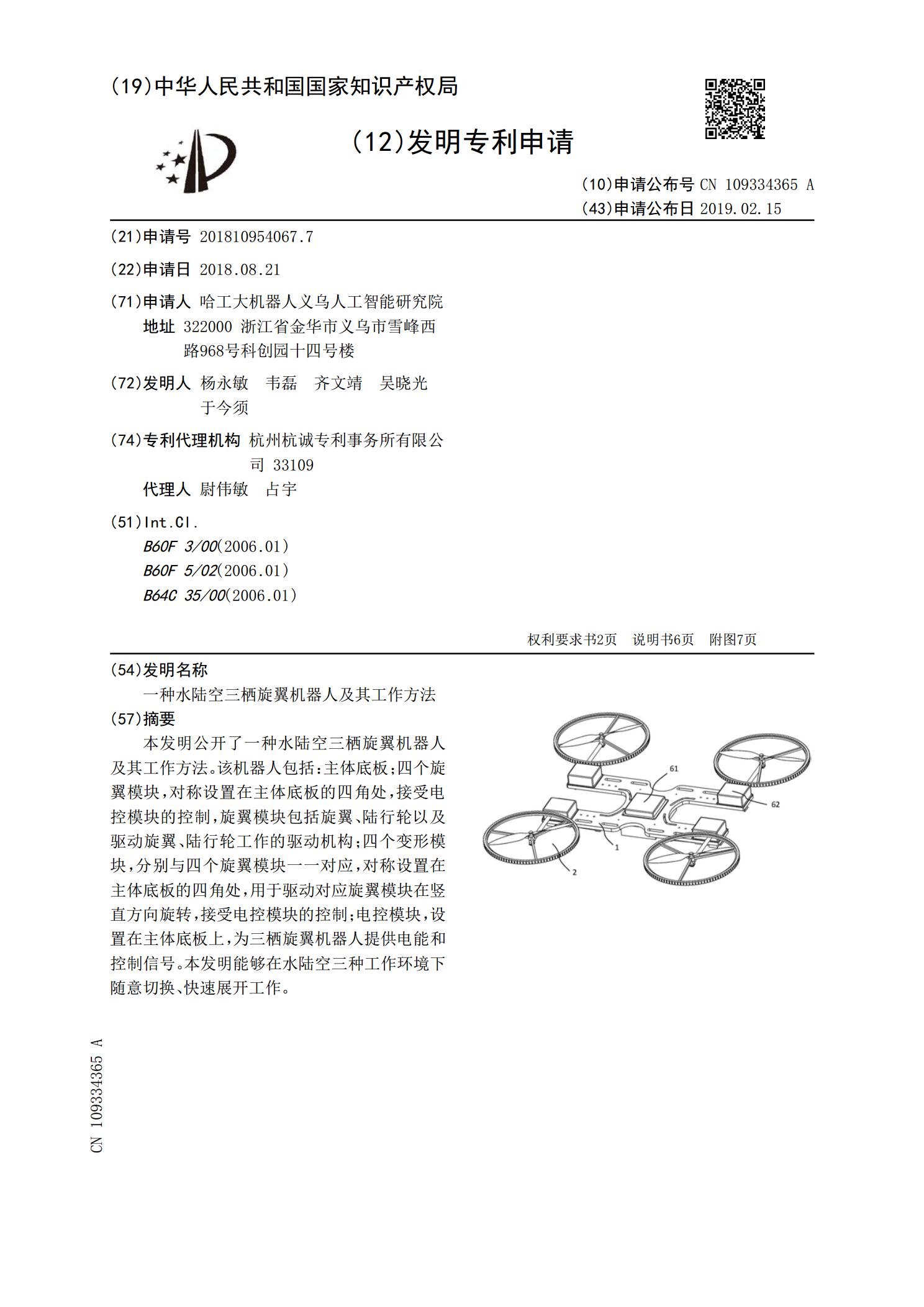
本发明公开了一种水陆空三栖旋翼机器人及其工作方法。该机器人包括:主体底板;四个旋翼模块,对称设置在主体底板的四角处,接受电控模块的控制,旋翼模块包括旋翼、陆行轮以及驱动旋翼、陆行轮工作的驱动机构;四个变形模块,分别与四个旋翼模块一一对应,对称设置在主体底板的四角处,用于驱动对应旋翼模块在竖直方向旋转,接受电控模块的控制;电控模块,设置在主体底板上,为三栖旋翼机器人提供电能和控制信号。本发明能够在水陆空三种工作环境下随意切换、快速展开工作。

一种水陆空三栖载人工具及其停放系统.pdf
本发明公开了一种水陆空三栖载人工具,包括:舱体,提供载人空间;活动机翼,设置于舱体的两侧,具有弹性且为分段结构,在机翼长度方向上包括与舱体转动连接的翼根段、与翼根段转动连接的翼尖段;外覆壳,与舱体活动连接,沿舱体的外周移动以驱动活动机翼变换伸展姿态,伸展姿态包括完全伸展、半伸展、完全收纳姿态,完全伸展姿态中翼根段、翼尖段完全伸展,半伸展姿态中翼根段绕舱体弯曲和/或折叠、翼尖段完全伸展,完全收纳姿态中翼根段、翼尖段绕舱体弯曲和/或折叠;机轮,设置于舱体前后侧。结构简单、使用方便,能实现水陆空三栖载人,切换对