
一种水陆空三栖旋翼机器人及其工作方法.pdf

篷璐****爱吗


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三旋翼轮式水陆空三栖机器人.pdf
本发明公开了一种三旋翼轮式水陆空三栖机器人。该机器人包括旋转翼组件、驱动轮组件、本体、调节翼组件、调压组件、万向轮、控制系统及传感器;所述旋转翼组件、调节翼组件均安装在本体上;驱动轮组件安装在本体左右两侧;调压组件安装在本体底部,通过控制本体体积的变化调节浮力大小;万向轮设置在本体末端;所述控制系统及各种传感器安装在本体上,用于多栖机器人的环境采集及控制;地面模式时三旋翼的两个旋翼自动折叠,另一个旋翼通过变结构提供地面辅助牵引力;水中模式时通过调压组件和其中两个旋翼控制潜水深度;空中模式时通过三个旋翼和两
一种两旋翼平衡车水陆空多栖机器人及其控制方法.pdf
本发明公开了一种两旋翼平衡车水陆空多栖机器人及其控制方法。该多栖机器人包括旋翼轮组件、转动旋翼组件和本体,左右个旋翼轮组件分别通过转动旋翼组件与本体连接,且旋翼轮组件通过转动旋翼组件在本体上转动。控制方法为:若在地面工作模式,遇到障碍则决策切换为飞行工作模式;越过障碍后,决策从飞行工作模式切换为地面工作模式;若遇到水坑或者湖面,则决策从地面工作模式或者飞行工作模式切换到水面工作模式;若在飞行过程中遇到强风的情形,则决策从飞行工作模式切换到地面工作模式。本发明采用轮模式和旋翼模式共享设计,实现了地面移动、空
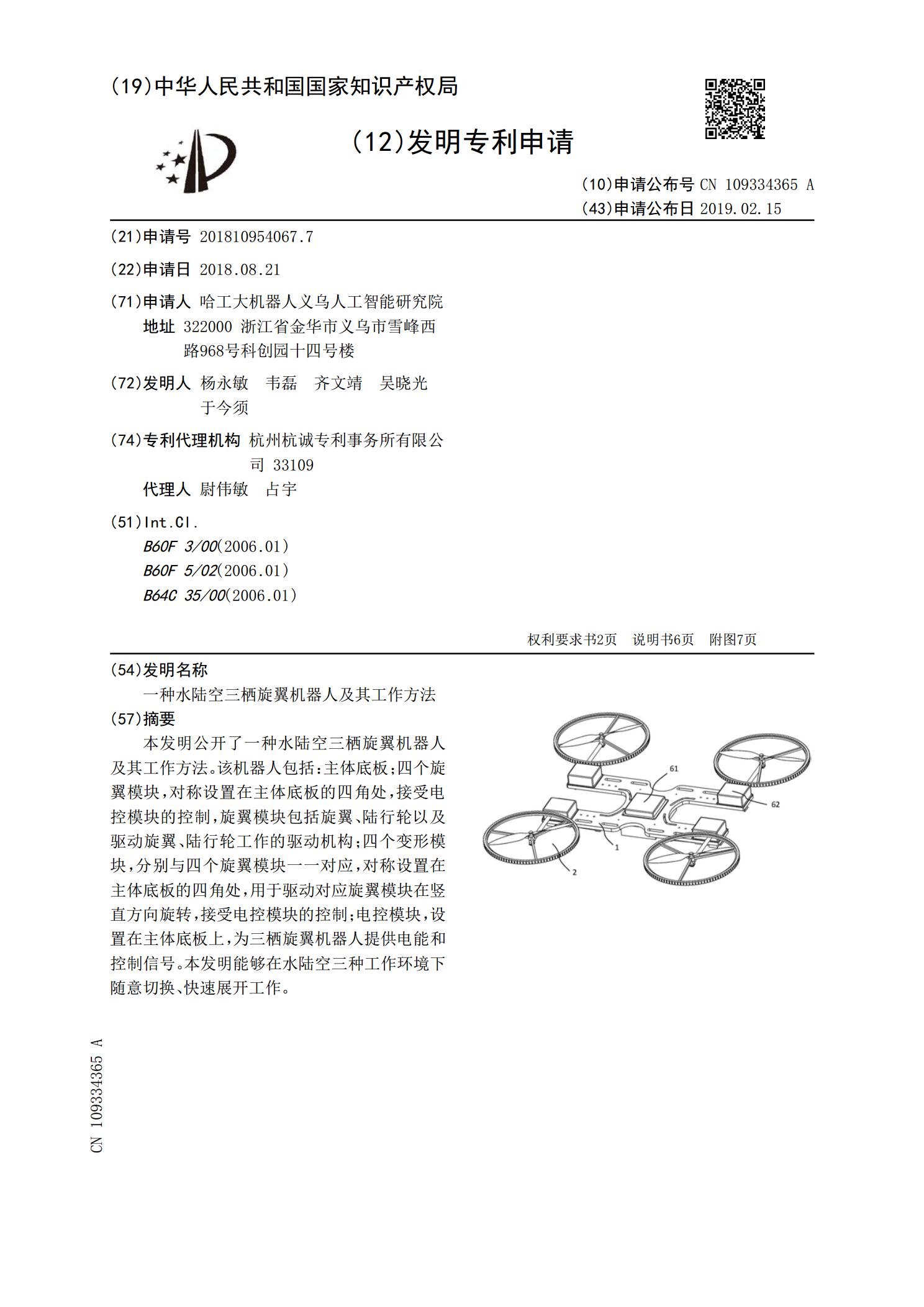
一种水陆空三栖旋翼机器人及其工作方法.pdf
本发明公开了一种水陆空三栖旋翼机器人及其工作方法。该机器人包括:主体底板;四个旋翼模块,对称设置在主体底板的四角处,接受电控模块的控制,旋翼模块包括旋翼、陆行轮以及驱动旋翼、陆行轮工作的驱动机构;四个变形模块,分别与四个旋翼模块一一对应,对称设置在主体底板的四角处,用于驱动对应旋翼模块在竖直方向旋转,接受电控模块的控制;电控模块,设置在主体底板上,为三栖旋翼机器人提供电能和控制信号。本发明能够在水陆空三种工作环境下随意切换、快速展开工作。

水陆空三栖多旋翼飞行器.pdf
本发明提供了一种水陆空三栖多旋翼飞行器,包括机身、悬臂、旋翼部和尾轮部;其中,所述悬臂的一端连接所述机身,所述旋翼部和所述尾轮部设置在所述悬臂另一端的端部;所述旋翼部设置在所述悬臂的上侧;所述尾轮部设置在所述悬臂的下侧;所述悬臂的数量为多个;所述旋翼部和所述尾轮部的数量与所述悬臂的数量一一对应;多个所述悬臂以所述机身的中心呈中心对称分布,以所述机身的轴线呈轴对称分布或沿所述机身的周向均匀分布。本发明通过组合旋翼部和尾轮部,从而能够实现空中飞行、地面滑行和水上滑行三种不同运动方式。
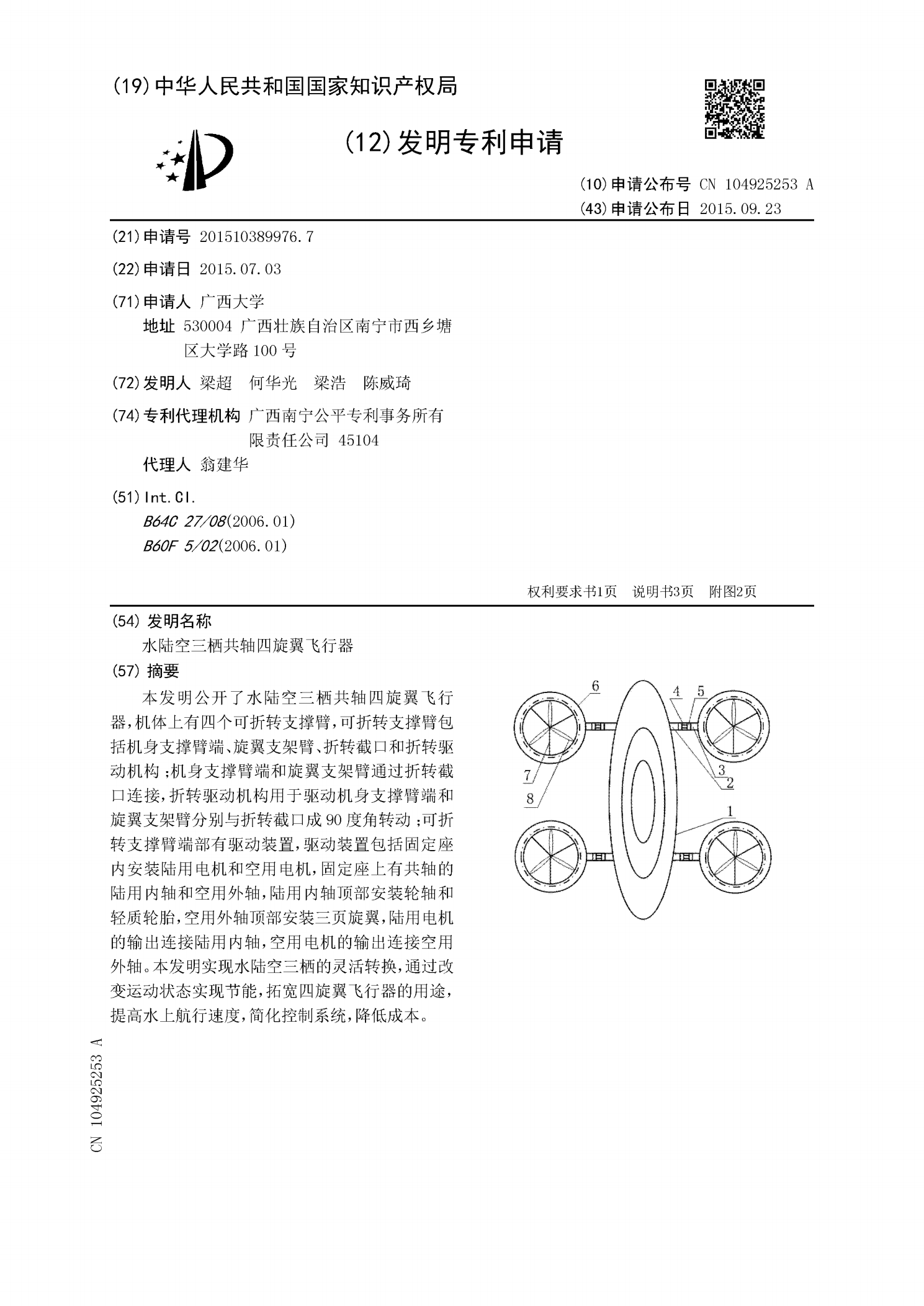
水陆空三栖共轴四旋翼飞行器.pdf
本发明公开了水陆空三栖共轴四旋翼飞行器,机体上有四个可折转支撑臂,可折转支撑臂包括机身支撑臂端、旋翼支架臂、折转截口和折转驱动机构;机身支撑臂端和旋翼支架臂通过折转截口连接,折转驱动机构用于驱动机身支撑臂端和旋翼支架臂分别与折转截口成90度角转动;可折转支撑臂端部有驱动装置,驱动装置包括固定座内安装陆用电机和空用电机,固定座上有共轴的陆用内轴和空用外轴,陆用内轴顶部安装轮轴和轻质轮胎,空用外轴顶部安装三页旋翼,陆用电机的输出连接陆用内轴,空用电机的输出连接空用外轴。本发明实现水陆空三栖的灵活转换,通过改变