
一种智能全向移动机器人.pdf

书生****aa


1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能全向移动机器人.pdf
本发明创造公开了一种智能全向移动机器人,包括圆形顶层板、圆形中层板、圆形底层板、上侧外围板、下侧外围板、控制器、无线通信模块、电源模块、蓄电池、电机驱动模块、激光传感器、超声波传感器、PSD传感器、操作面板、摄像头、三个驱动电机以及三个全向轮。该智能全向移动机器人利用各个传感器采集外部信号,由控制器相互协调实现机器人的全向移动、自主避障以及语音控制等功能,具有稳定性高、可靠性好,能够适应多种环境,自主智能避障运行,能够进行语音操控,可以广泛应用于智能物流系统中。
一种全向移动平台及全向移动机器人.pdf
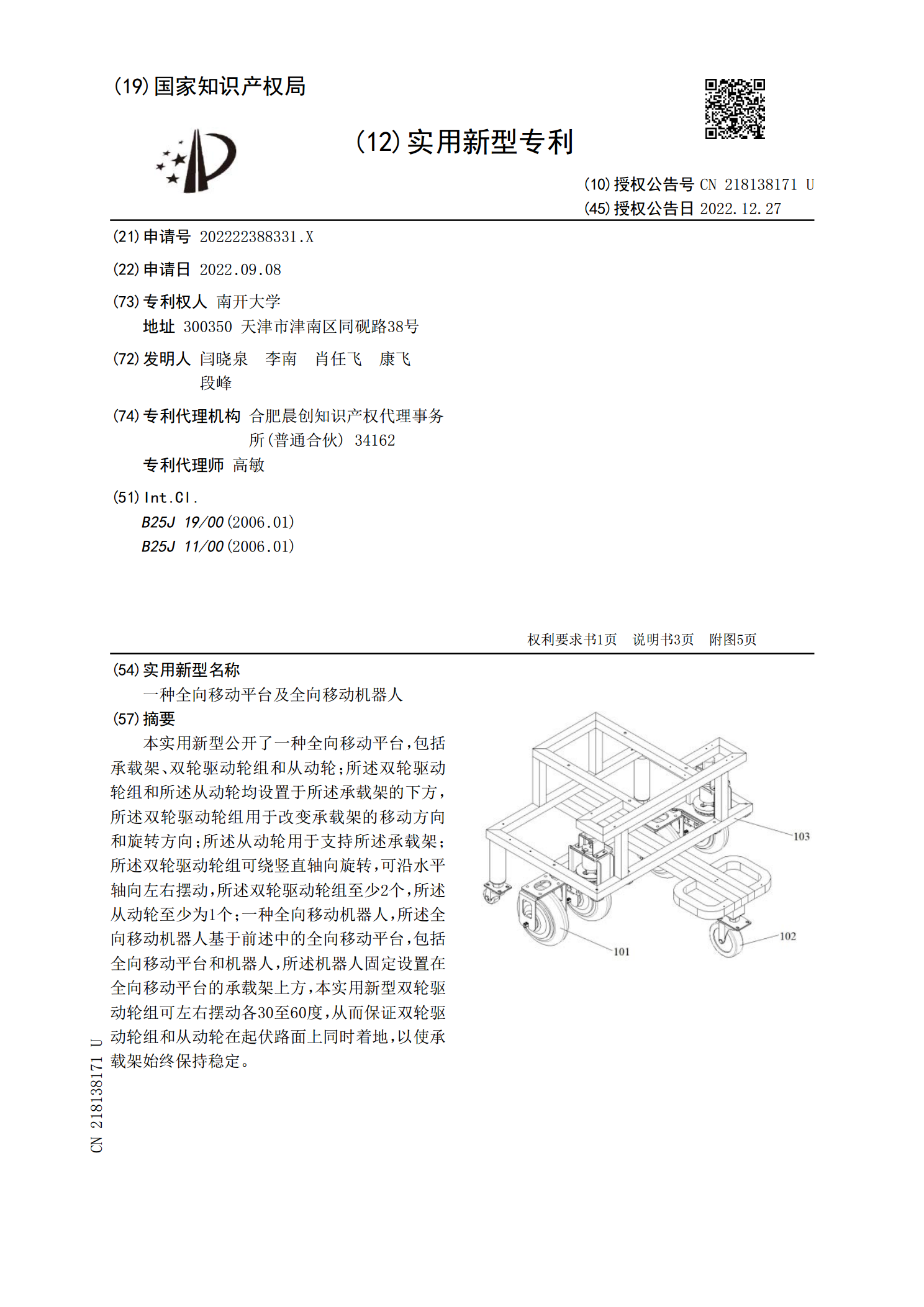
本实用新型公开了一种全向移动平台,包括承载架、双轮驱动轮组和从动轮;所述双轮驱动轮组和所述从动轮均设置于所述承载架的下方,所述双轮驱动轮组用于改变承载架的移动方向和旋转方向;所述从动轮用于支持所述承载架;所述双轮驱动轮组可绕竖直轴向旋转,可沿水平轴向左右摆动,所述双轮驱动轮组至少2个,所述从动轮至少为1个;一种全向移动机器人,所述全向移动机器人基于前述中的全向移动平台,包括全向移动平台和机器人,所述机器人固定设置在全向移动平台的承载架上方,本实用新型双轮驱动轮组可左右摆动各30至60度,从而保证双轮驱动轮

一种全向移动机器人.pdf
本发明提供了一种全向移动机器人,包括车体、麦克纳姆轮部件、电控系统、电源系统、调姿平台、机械臂和双目视觉系统,四个麦克纳姆轮部件分别固定安装至车体的四角,电控系统和电源系统安装至车体内部,实现两个自由度方向调整的调姿平台固定安装至车体上,实现六自由度操控的机械臂固定安装至调姿平台的斜支撑平台,双目视觉系统固定安装至车体。本发明依靠机械臂+车身自动导航+双目视觉系统实现全向移动自动焊接功能的结构形式,这种结构可以适应全向移动自动(焊接、搬运、涂胶、装配等)需求。
一种全向智能小车.pdf
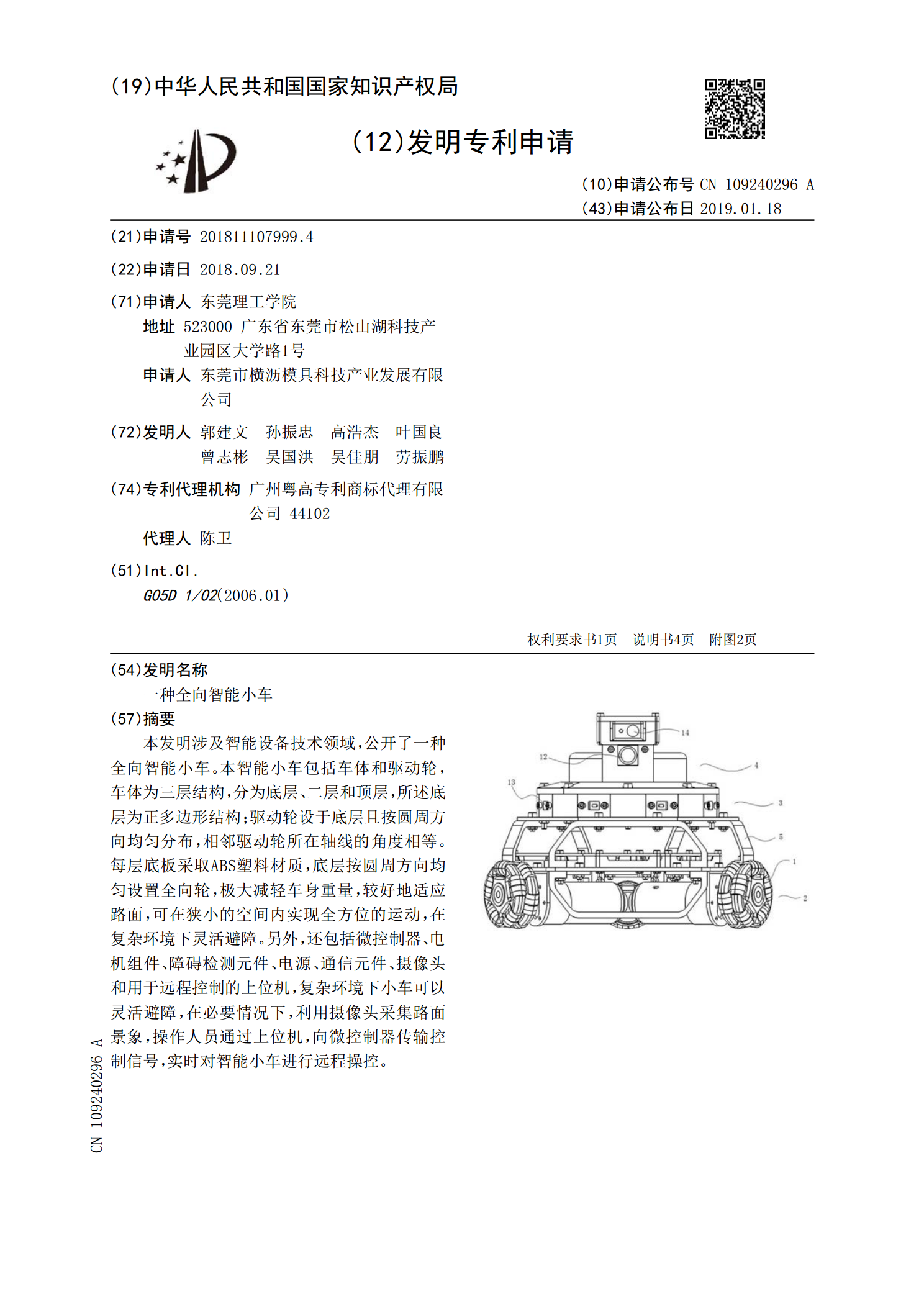
本发明涉及智能设备技术领域,公开了一种全向智能小车。本智能小车包括车体和驱动轮,车体为三层结构,分为底层、二层和顶层,所述底层为正多边形结构;驱动轮设于底层且按圆周方向均匀分布,相邻驱动轮所在轴线的角度相等。每层底板采取ABS塑料材质,底层按圆周方向均匀设置全向轮,极大减轻车身重量,较好地适应路面,可在狭小的空间内实现全方位的运动,在复杂环境下灵活避障。另外,还包括微控制器、电机组件、障碍检测元件、电源、通信元件、摄像头和用于远程控制的上位机,复杂环境下小车可以灵活避障,在必要情况下,利用摄像头采集路面景

一种全向智能移位设备.pdf
本申请提供了一种全向智能移位设备,包括驱动底盘和安装在所述驱动底盘上的移位机构;所述驱动底盘包括底座,所述底座的下部转角处分别安装有电机;每个所述电机的转动端连接有全向轮;所述移位机构包括前臂、后臂、升降部件和吊带支架;所述后臂的一端通过后臂直线升降缸与底座的上表面相连接,所述后臂的另一端与所述前臂的一端转动连接,所述前臂的另一端与吊带支架连接;前臂还通过升降部件与所述后臂连接;吊带支架的下部连接有吊带。在底座上的每个全向轮分别与电机相连,利用电机的转动可使全向轮在原位进行转动,无需转动半径,方便医护人员