
一种自动爬楼梯轮椅.pdf

一吃****天材

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动爬楼梯轮椅.pdf
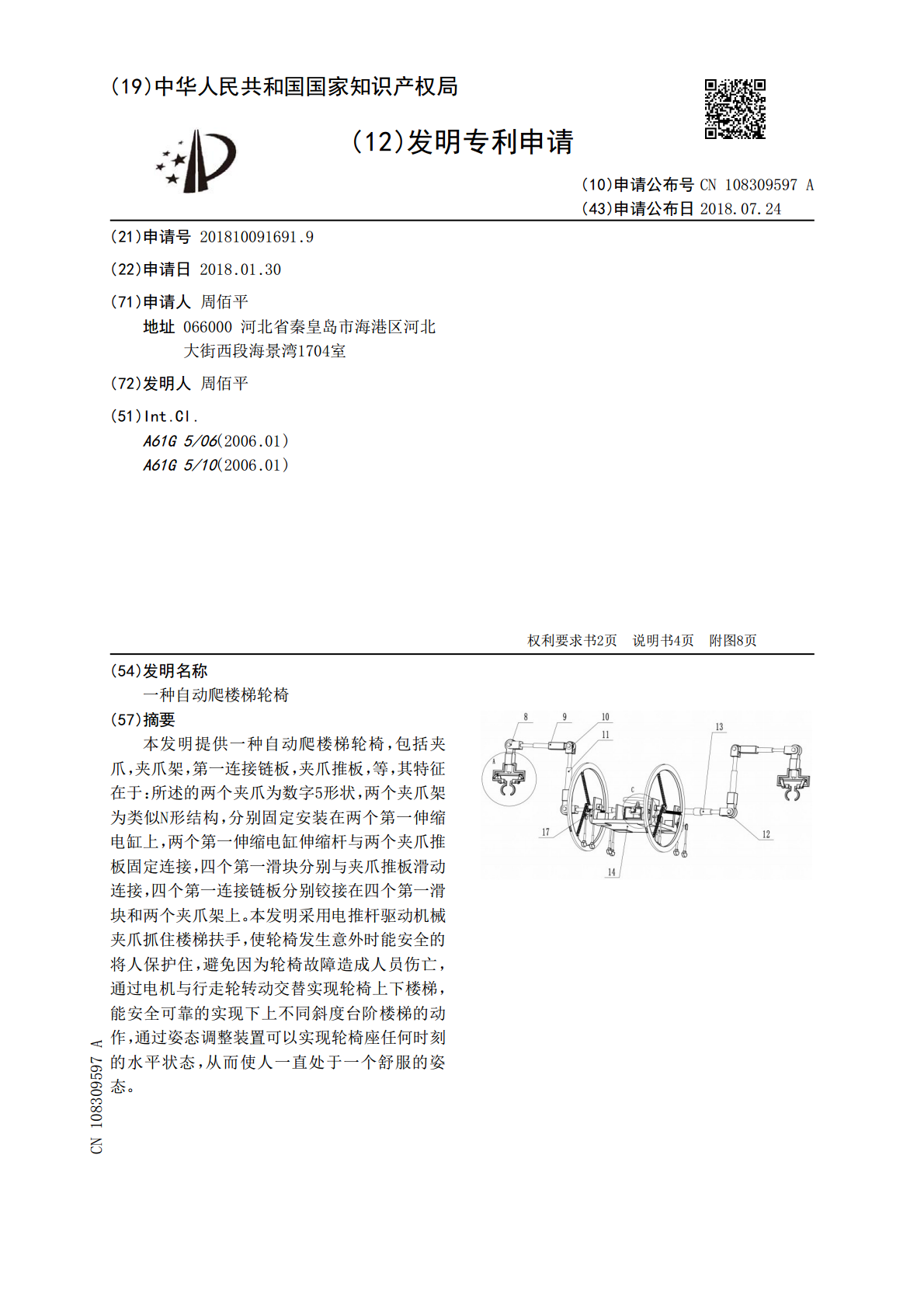
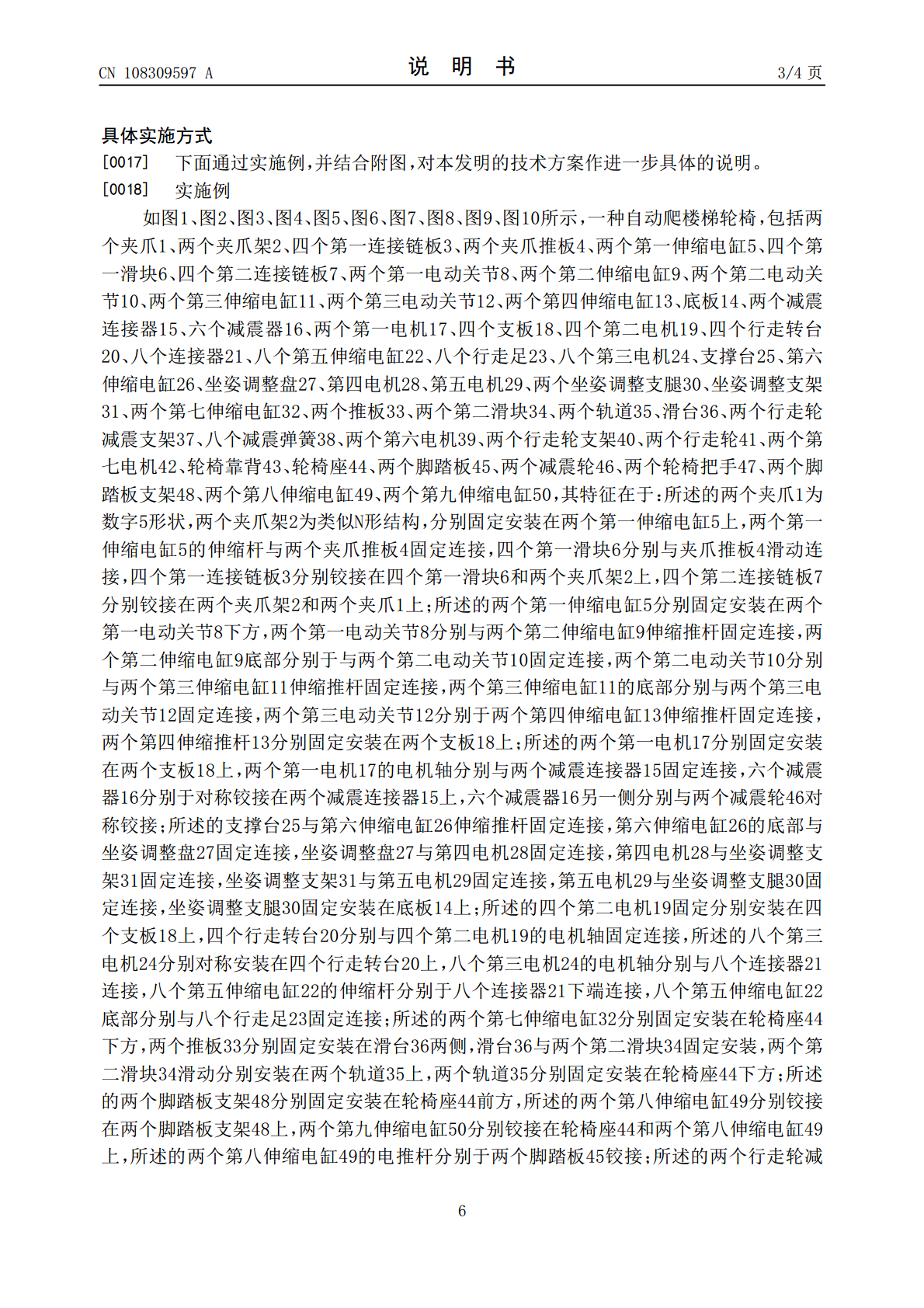
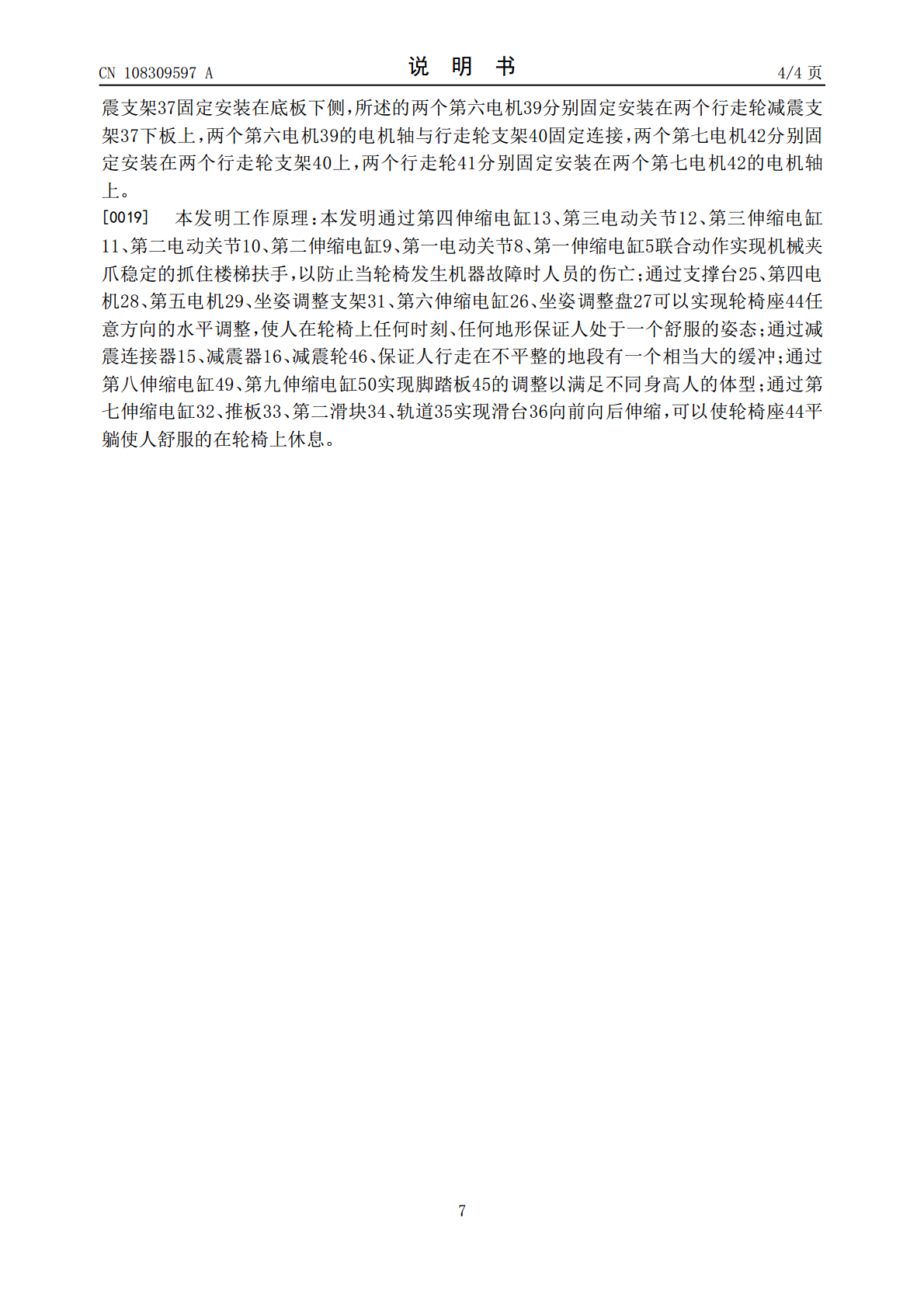
本发明提供一种自动爬楼梯轮椅,包括夹爪,夹爪架,第一连接链板,夹爪推板,等,其特征在于:所述的两个夹爪为数字5形状,两个夹爪架为类似N形结构,分别固定安装在两个第一伸缩电缸上,两个第一伸缩电缸伸缩杆与两个夹爪推板固定连接,四个第一滑块分别与夹爪推板滑动连接,四个第一连接链板分别铰接在四个第一滑块和两个夹爪架上。本发明采用电推杆驱动机械夹爪抓住楼梯扶手,使轮椅发生意外时能安全的将人保护住,避免因为轮椅故障造成人员伤亡,通过电机与行走轮转动交替实现轮椅上下楼梯,能安全可靠的实现下上不同斜度台阶楼梯的动作,通过
一种自动测距的智能爬楼梯轮椅.pdf
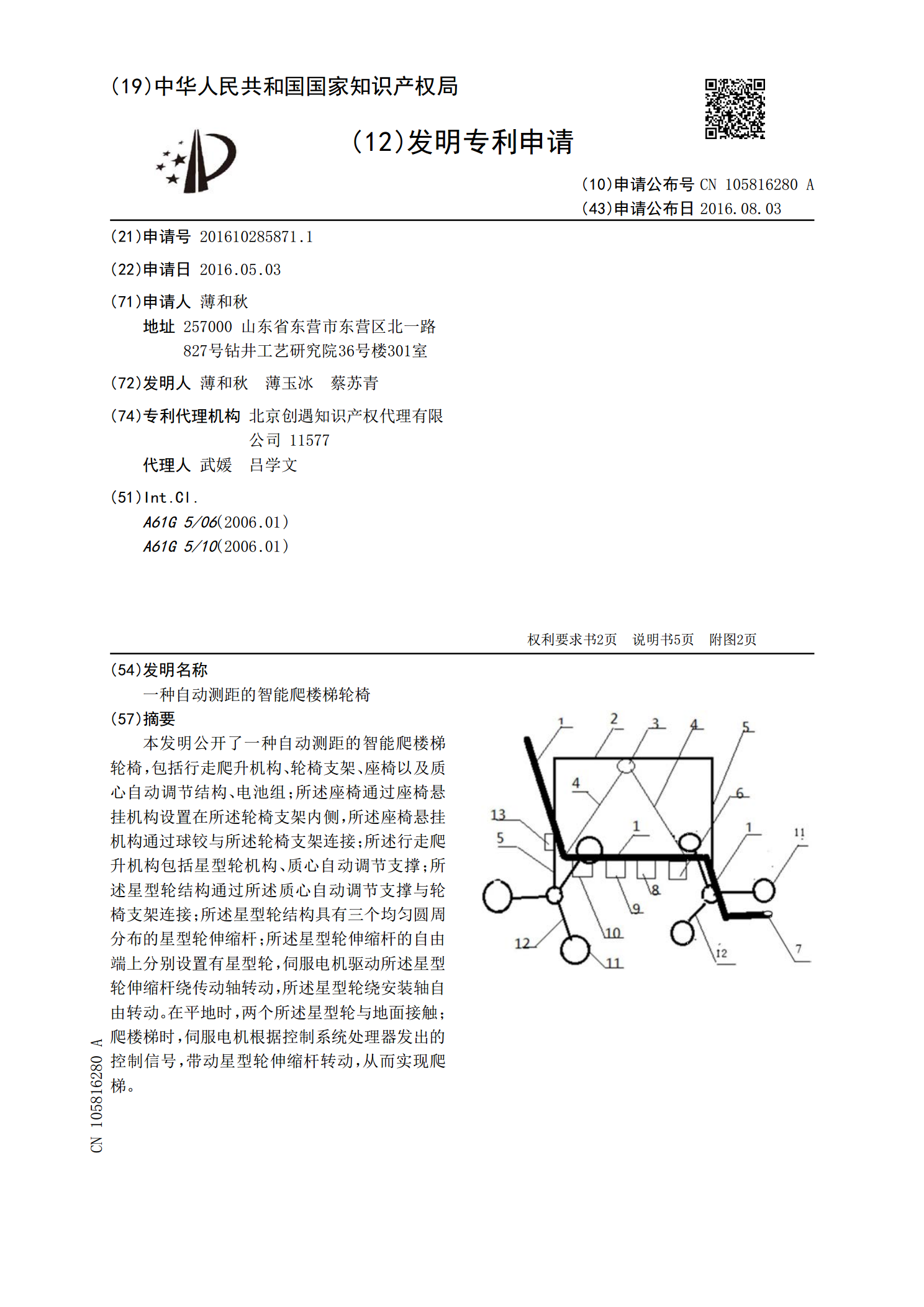
本发明公开了一种自动测距的智能爬楼梯轮椅,包括行走爬升机构、轮椅支架、座椅以及质心自动调节结构、电池组;所述座椅通过座椅悬挂机构设置在所述轮椅支架内侧,所述座椅悬挂机构通过球铰与所述轮椅支架连接;所述行走爬升机构包括星型轮机构、质心自动调节支撑;所述星型轮结构通过所述质心自动调节支撑与轮椅支架连接;所述星型轮结构具有三个均匀圆周分布的星型轮伸缩杆;所述星型轮伸缩杆的自由端上分别设置有星型轮,伺服电机驱动所述星型轮伸缩杆绕传动轴转动,所述星型轮绕安装轴自由转动。在平地时,两个所述星型轮与地面接触;爬楼梯时,
一种吸盘式自动爬楼梯轮椅.pdf
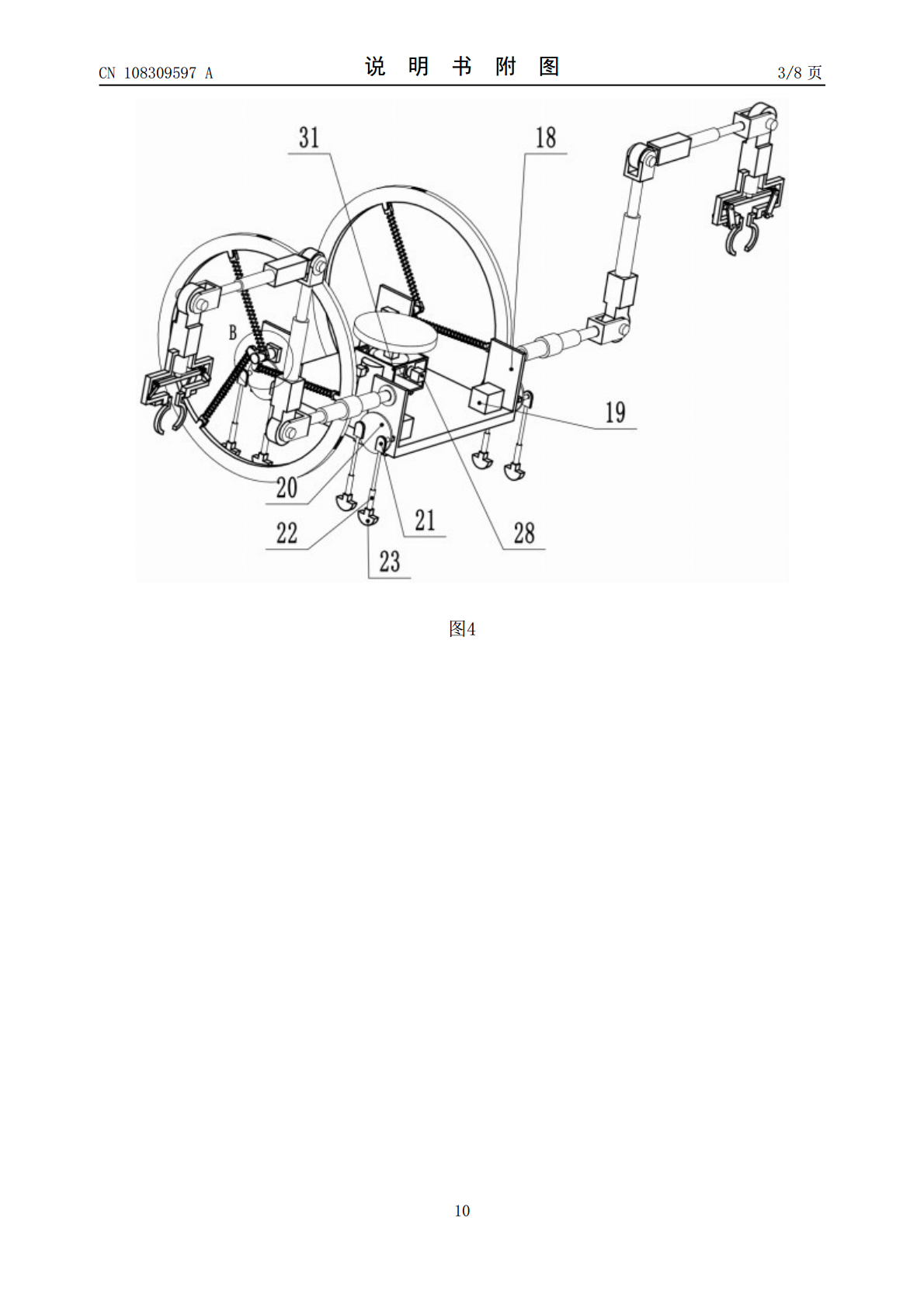
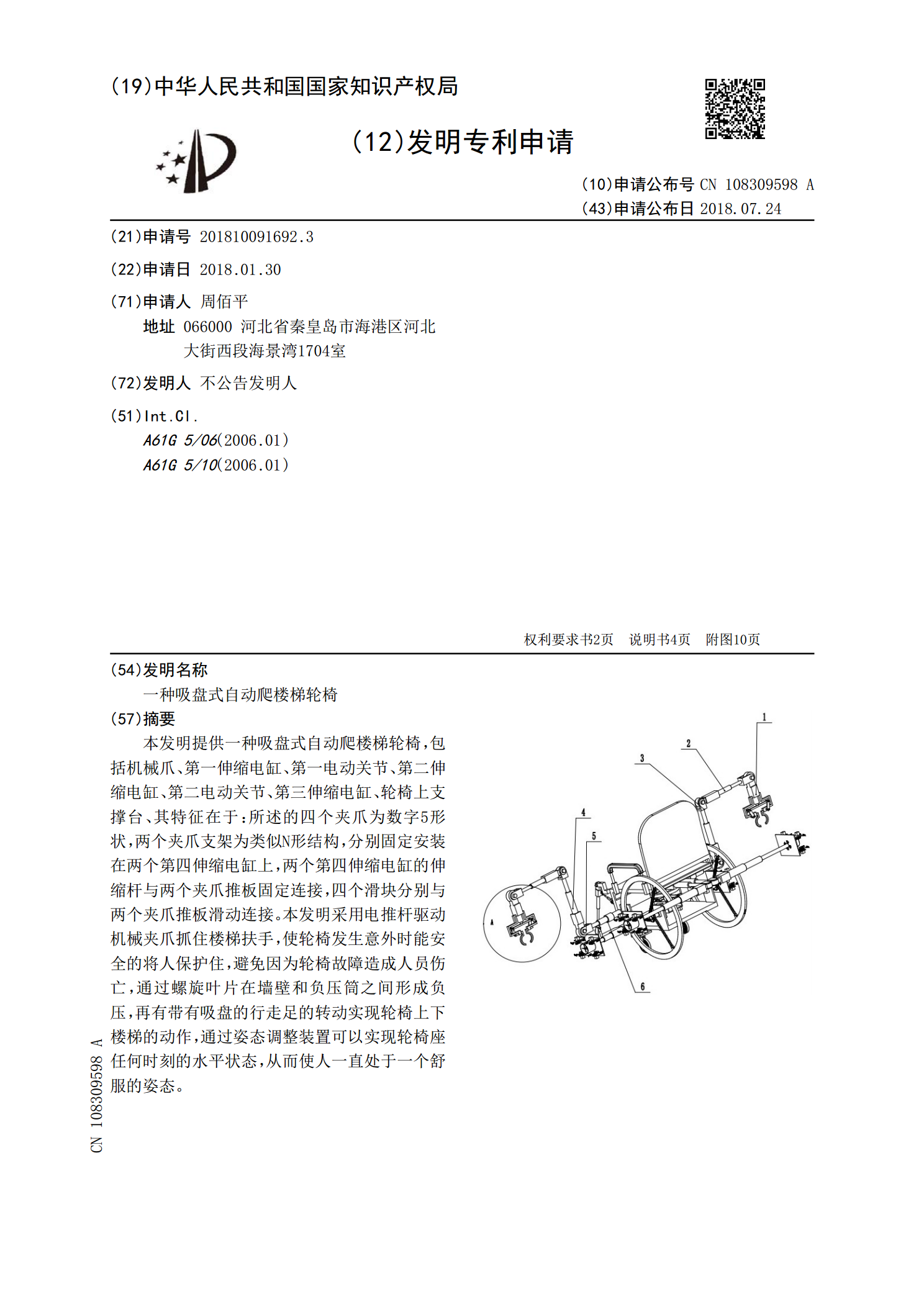
本发明提供一种吸盘式自动爬楼梯轮椅,包括机械爪、第一伸缩电缸、第一电动关节、第二伸缩电缸、第二电动关节、第三伸缩电缸、轮椅上支撑台、其特征在于:所述的四个夹爪为数字5形状,两个夹爪支架为类似N形结构,分别固定安装在两个第四伸缩电缸上,两个第四伸缩电缸的伸缩杆与两个夹爪推板固定连接,四个滑块分别与两个夹爪推板滑动连接。本发明采用电推杆驱动机械夹爪抓住楼梯扶手,使轮椅发生意外时能安全的将人保护住,避免因为轮椅故障造成人员伤亡,通过螺旋叶片在墙壁和负压筒之间形成负压,再有带有吸盘的行走足的转动实现轮椅上下楼梯的
一种新型六自由度自动爬楼梯轮椅.pdf
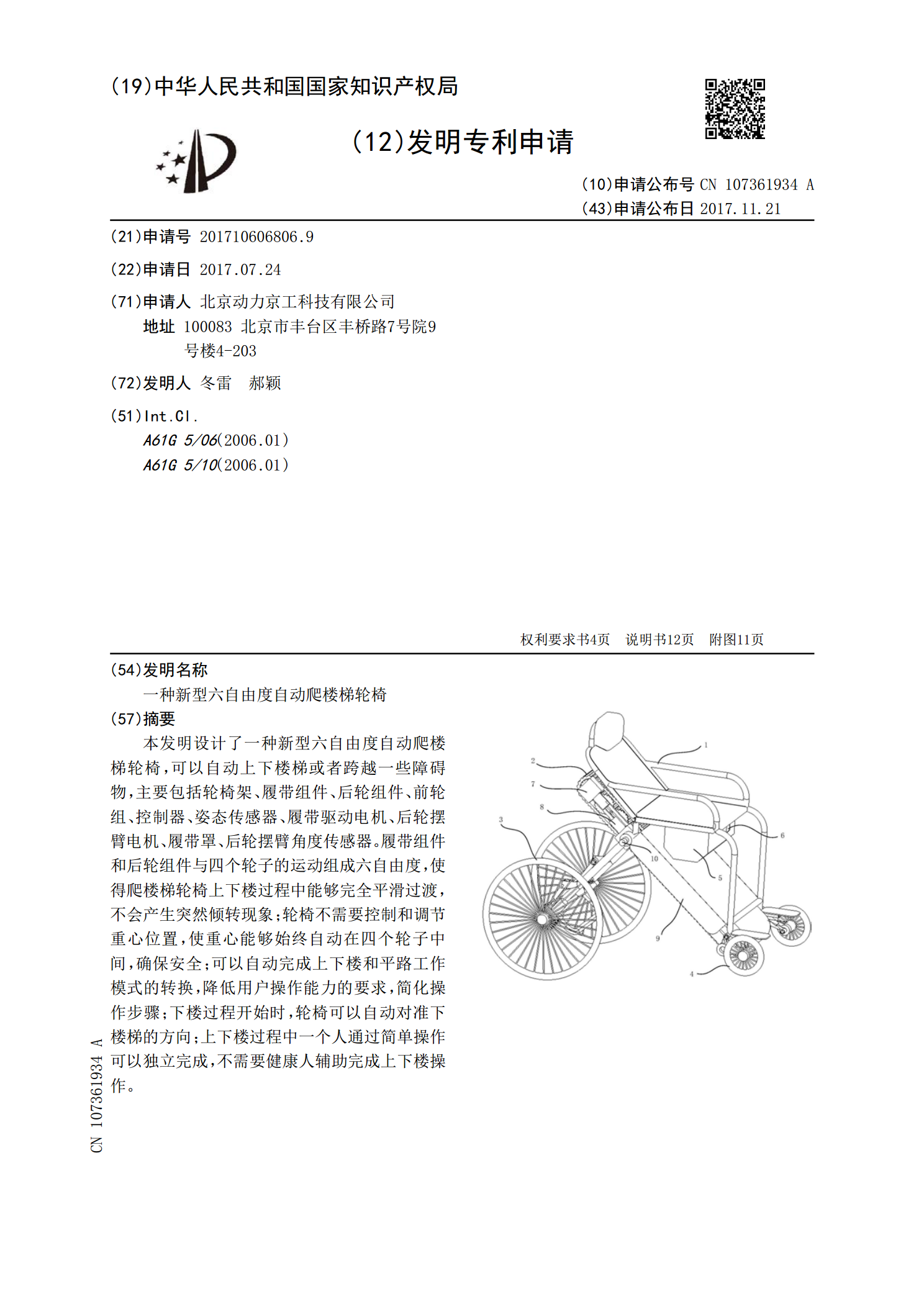
本发明设计了一种新型六自由度自动爬楼梯轮椅,可以自动上下楼梯或者跨越一些障碍物,主要包括轮椅架、履带组件、后轮组件、前轮组、控制器、姿态传感器、履带驱动电机、后轮摆臂电机、履带罩、后轮摆臂角度传感器。履带组件和后轮组件与四个轮子的运动组成六自由度,使得爬楼梯轮椅上下楼过程中能够完全平滑过渡,不会产生突然倾转现象;轮椅不需要控制和调节重心位置,使重心能够始终自动在四个轮子中间,确保安全;可以自动完成上下楼和平路工作模式的转换,降低用户操作能力的要求,简化操作步骤;下楼过程开始时,轮椅可以自动对准下楼梯的方向

一种爬楼梯轮椅.pdf
本发明公开了一种爬楼梯轮椅,其中包括椅面,固定连接在所述椅面下表面的支架,设置在所述椅面下方的前部且用于沿竖直方向移动的第一升降机构,转动设置在所述第一升降机构上的前驱动轮;设置在所述椅面下方的后部且用于沿竖直方向移动的第二升降机构,铰接的所述第二升降机构前端且用于前后摆动的后轮推摆机构,转动设置在所述后轮推摆机构上的后驱动轮;设置在所述第二升降机构后端且用于沿竖直方向移动的第三升降机构,转动设置在所述第三升降机构上的第一辅助轮;固定设置在所述椅面下且用于前后摆动的辅助推摆机构,转动设置在所述辅助推摆机构