
一种四轮轮毂电机独立驱动控制方法.pdf

一只****签网

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种四轮轮毂电机独立驱动控制方法.pdf
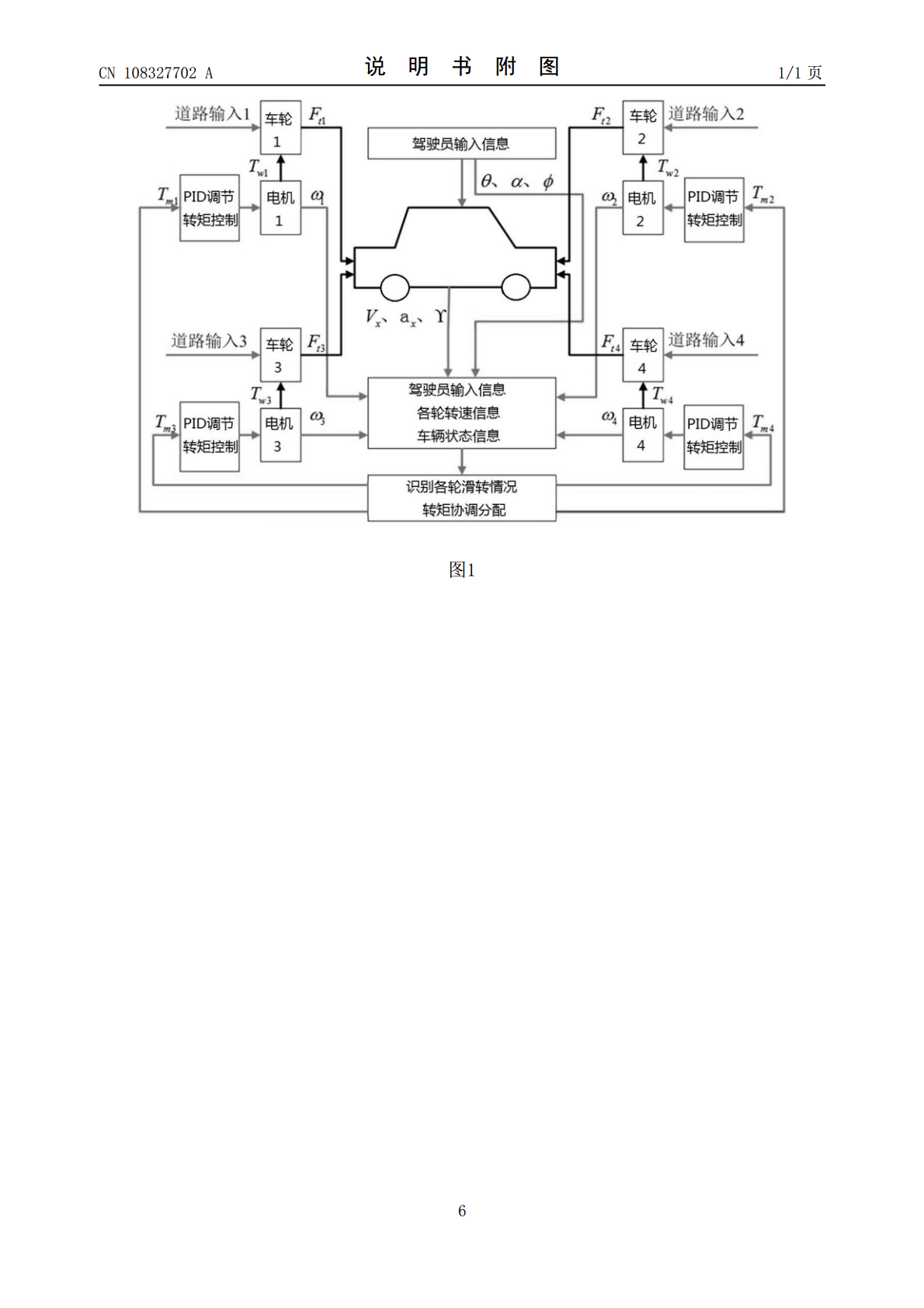
本发明公开了一种四轮轮毂电机独立驱动控制方法。控制过程为:通过对驾驶员输入的信息以和辆状态信息进行计算,得到整车保持稳定的纵向力矩;并确定是进行动力性协调控制或是进行稳定性协调控制;将计算出的纵向力矩分配给各轮毂电机控制器中,实现车辆稳定性控制;确定的进行动力性协调控制或进行稳定性协调控制,分别采用不同策略,调整各电机的驱动力矩使车轮获得最佳的滑转率或调整各电机的驱动转矩得到所需的附加横摆力矩。本发明以车辆动力性和稳定性为目标,合理调节车轮转矩,能够显著提升越野汽车的路面急加速或紧急制动的安全性、实现超强
一种轮毂电机驱动桥电机差速控制方法.pdf
本发明公开了一种轮毂电机驱动桥电机差速控制方法,该方法通过判断两边轮毂电机转速差、整车油门信号、速度大小数值来判断是否进入差速模式,并且在差速模式下对两个轮毂电机的转速以及扭矩进行控制,无需额外辅助传感器,差速完全通过软件实现,没有额外的维护费用;系统更加安全,稳定,因而使得轮毂电机广泛应用于新能源成为可能。
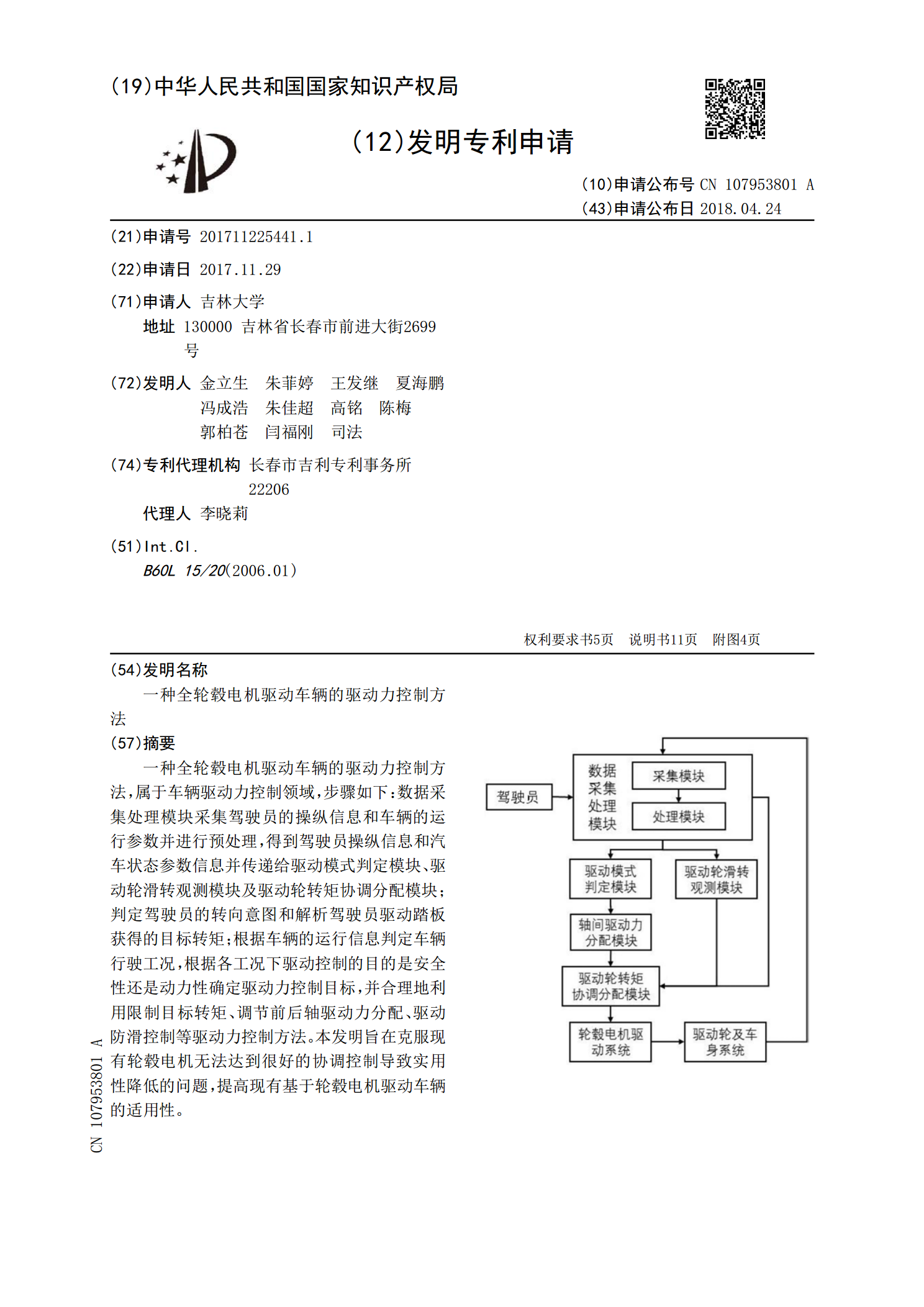
一种全轮毂电机驱动车辆的驱动力控制方法.pdf
一种全轮毂电机驱动车辆的驱动力控制方法,属于车辆驱动力控制领域,步骤如下:数据采集处理模块采集驾驶员的操纵信息和车辆的运行参数并进行预处理,得到驾驶员操纵信息和汽车状态参数信息并传递给驱动模式判定模块、驱动轮滑转观测模块及驱动轮转矩协调分配模块;判定驾驶员的转向意图和解析驾驶员驱动踏板获得的目标转矩;根据车辆的运行信息判定车辆行驶工况,根据各工况下驱动控制的目的是安全性还是动力性确定驱动力控制目标,并合理地利用限制目标转矩、调节前后轴驱动力分配、驱动防滑控制等驱动力控制方法。本发明旨在克服现有轮毂电机无法
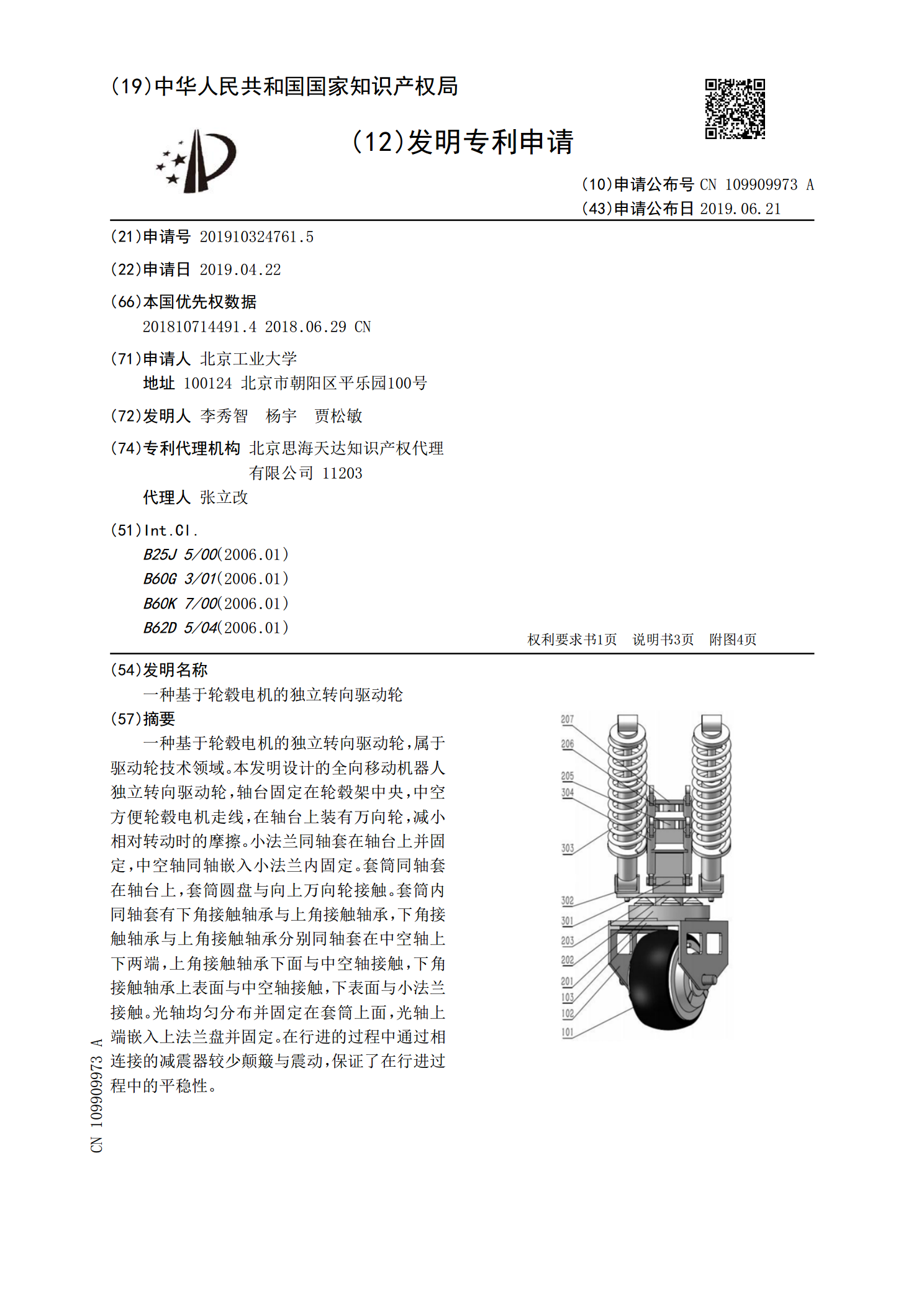
一种基于轮毂电机的独立转向驱动轮.pdf
一种基于轮毂电机的独立转向驱动轮,属于驱动轮技术领域。本发明设计的全向移动机器人独立转向驱动轮,轴台固定在轮毂架中央,中空方便轮毂电机走线,在轴台上装有万向轮,减小相对转动时的摩擦。小法兰同轴套在轴台上并固定,中空轴同轴嵌入小法兰内固定。套筒同轴套在轴台上,套筒圆盘与向上万向轮接触。套筒内同轴套有下角接触轴承与上角接触轴承,下角接触轴承与上角接触轴承分别同轴套在中空轴上下两端,上角接触轴承下面与中空轴接触,下角接触轴承上表面与中空轴接触,下表面与小法兰接触。光轴均匀分布并固定在套筒上面,光轴上端嵌入上法兰
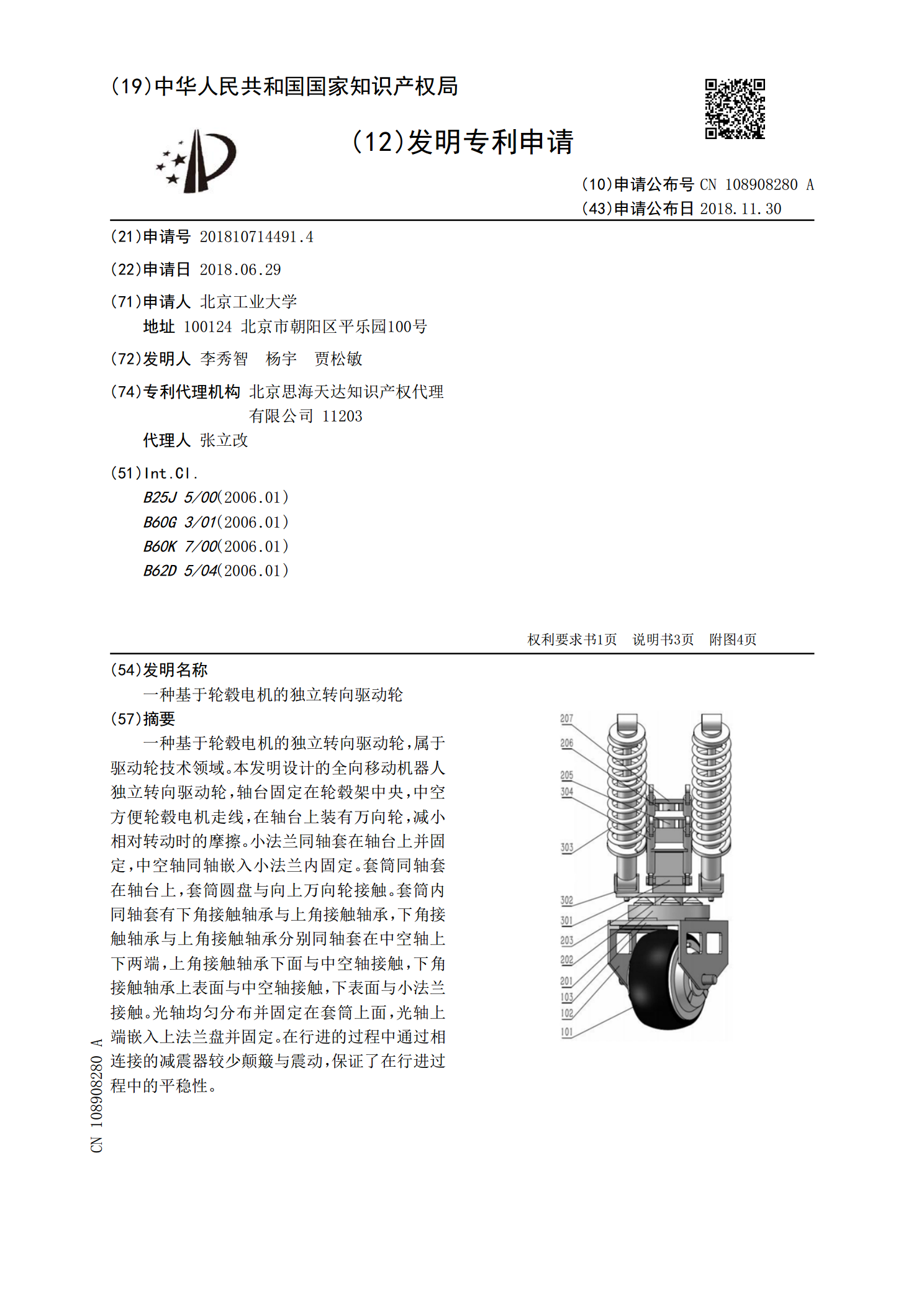
一种基于轮毂电机的独立转向驱动轮.pdf
一种基于轮毂电机的独立转向驱动轮,属于驱动轮技术领域。本发明设计的全向移动机器人独立转向驱动轮,轴台固定在轮毂架中央,中空方便轮毂电机走线,在轴台上装有万向轮,减小相对转动时的摩擦。小法兰同轴套在轴台上并固定,中空轴同轴嵌入小法兰内固定。套筒同轴套在轴台上,套筒圆盘与向上万向轮接触。套筒内同轴套有下角接触轴承与上角接触轴承,下角接触轴承与上角接触轴承分别同轴套在中空轴上下两端,上角接触轴承下面与中空轴接触,下角接触轴承上表面与中空轴接触,下表面与小法兰接触。光轴均匀分布并固定在套筒上面,光轴上端嵌入上法兰