
用于调设车辆的制动压力的方法和用于执行该方法的制动设施.pdf

新月****姐a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于调设车辆的制动压力的方法和用于执行该方法的制动设施.pdf
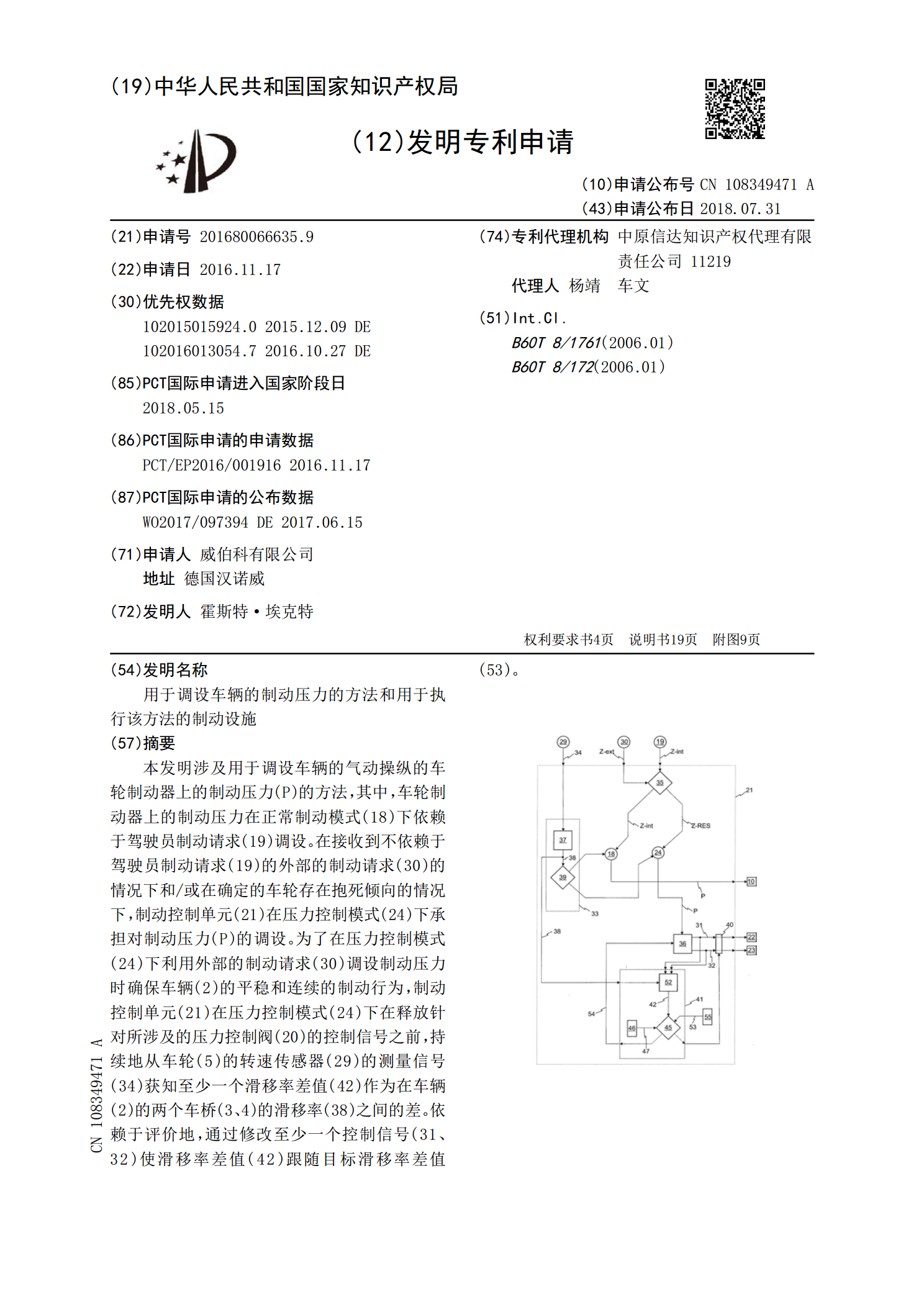
本发明涉及用于调设车辆的气动操纵的车轮制动器上的制动压力(P)的方法,其中,车轮制动器上的制动压力在正常制动模式(18)下依赖于驾驶员制动请求(19)调设。在接收到不依赖于驾驶员制动请求(19)的外部的制动请求(30)的情况下和/或在确定的车轮存在抱死倾向的情况下,制动控制单元(21)在压力控制模式(24)下承担对制动压力(P)的调设。为了在压力控制模式(24)下利用外部的制动请求(30)调设制动压力时确保车辆(2)的平稳和连续的制动行为,制动控制单元(21)在压力控制模式(24)下在释放针对所涉及的压力

用于调整车辆的气动操纵的车轮制动器处的制动压力的方法、用于执行该方法的制动设备以及车辆.pdf
本发明涉及一种用于调整在车辆的气动地操纵的车轮制动器处的制动压力的方法、一种用于执行该方法的制动设备和一种带有这种制动设备的车辆。在车轮制动器处的制动压力在正常制动模式(18)中根据驾驶员制动请求(19)进行调整。为了履行行驶稳定性功能,亦即至少一个防抱死功能,以及为了履行外部的制动请求(30),制动控制单元(21)在压力控制模式(24)中承担起对制动压力(P)的调整。制动控制单元(21)在正常制动模式(18)中连续地确定至少一个滑移率差值(42)作为在车辆(2)的两个车轮或车桥的滑移率值(38)的差,并

用于运行制动系统的方法及执行该方法的制动系统.pdf
本发明涉及一种用于运行机动车的制动系统的方法以及一种制动系统,所述制动系统具有:电控制的压力提供装置(5),其由具有至少一个液压压力室(37)的缸‑活塞组件构成,该缸‑活塞组件的活塞(36)可通过机电式执行器(35)移动;多个车轮制动器(8,9,10,11),分别通过电操作的进入阀(6a~6b)与压力提供装置(5)连接;以及对于车轮制动器至少之一具有电操作的排出阀(7a~7d),所述车轮制动器可借助于所述排出阀与压力介质储备容器(4)连接。在所述制动系统的正常调节模式(N)中,当存在预给定的制动条件(A)
用于车辆的制动系统、车辆和用于运行制动系统的方法.pdf
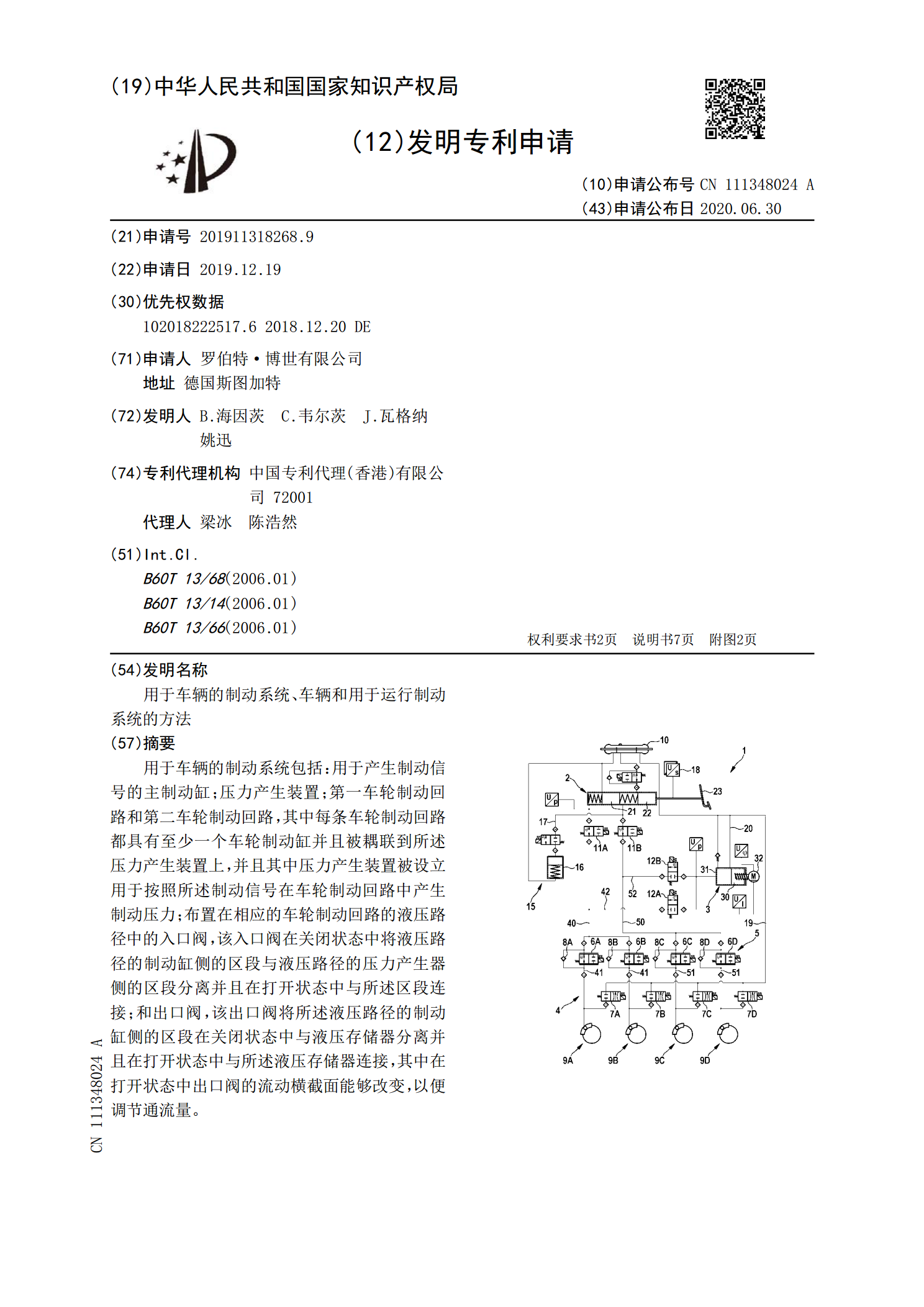
用于车辆的制动系统包括:用于产生制动信号的主制动缸;压力产生装置;第一车轮制动回路和第二车轮制动回路,其中每条车轮制动回路都具有至少一个车轮制动缸并且被耦联到所述压力产生装置上,并且其中压力产生装置被设立用于按照所述制动信号在车轮制动回路中产生制动压力;布置在相应的车轮制动回路的液压路径中的入口阀,该入口阀在关闭状态中将液压路径的制动缸侧的区段与液压路径的压力产生器侧的区段分离并且在打开状态中与所述区段连接;和出口阀,该出口阀将所述液压路径的制动缸侧的区段在关闭状态中与液压存储器分离并且在打开状态中与所述

用于车辆的制动控制装置和用于车辆的制动控制方法.pdf
一种用于车辆的制动控制装置,包括第一减速度计算单元、第二减速度计算单元、辅助控制单元和终止判定单元。第一减速度计算单元利用来自轮速传感器的检测信号计算第一估算车体减速度。第二减速度计算单元利用车体加速度传感器的检测信号计算第二估算车体减速度。如果第一估算车体减速度超过第一减速度判定值并且第二估算车体减速度超过第二减速度判定值,则辅助控制单元启动用于支持增大制动力的辅助控制。终止判定单元基于第一估算车体减速度和/或第二估算车体减速度判定是否已经满足辅助控制的终止条件。如果终止判定单元判定已经满足终止条件,则