
一种楼梯清洁机器人.pdf

是立****92

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种楼梯清洁机器人.pdf
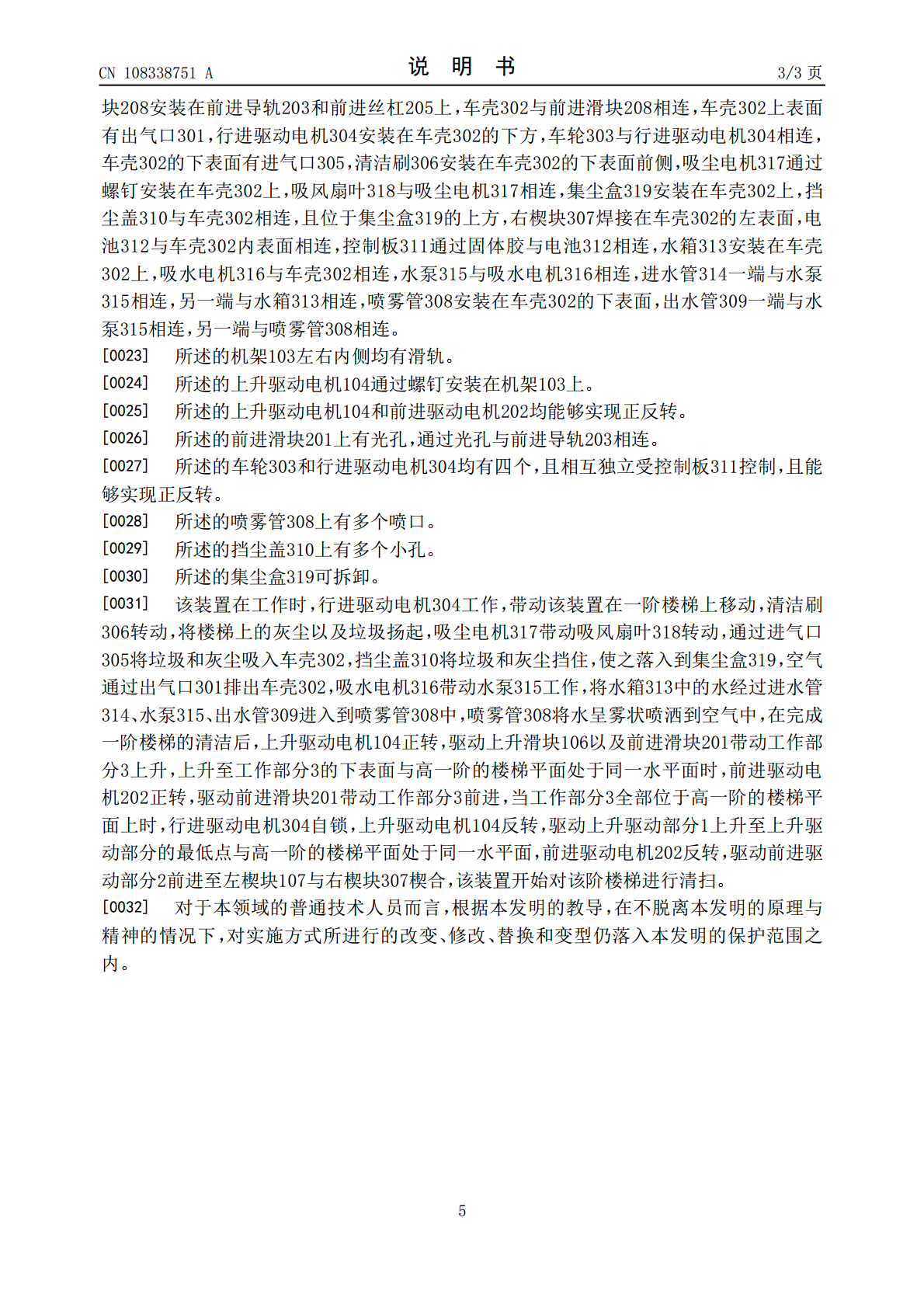
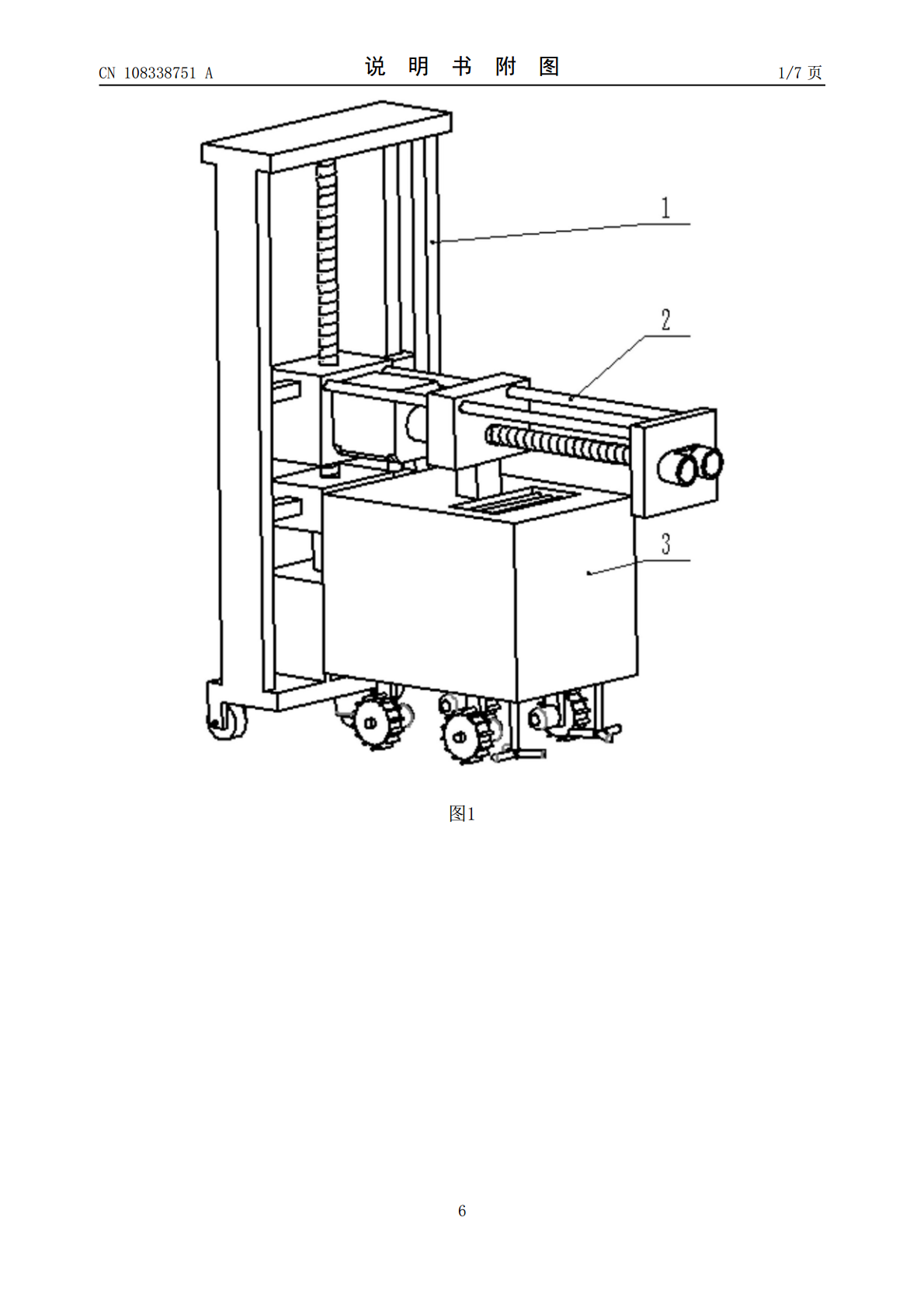
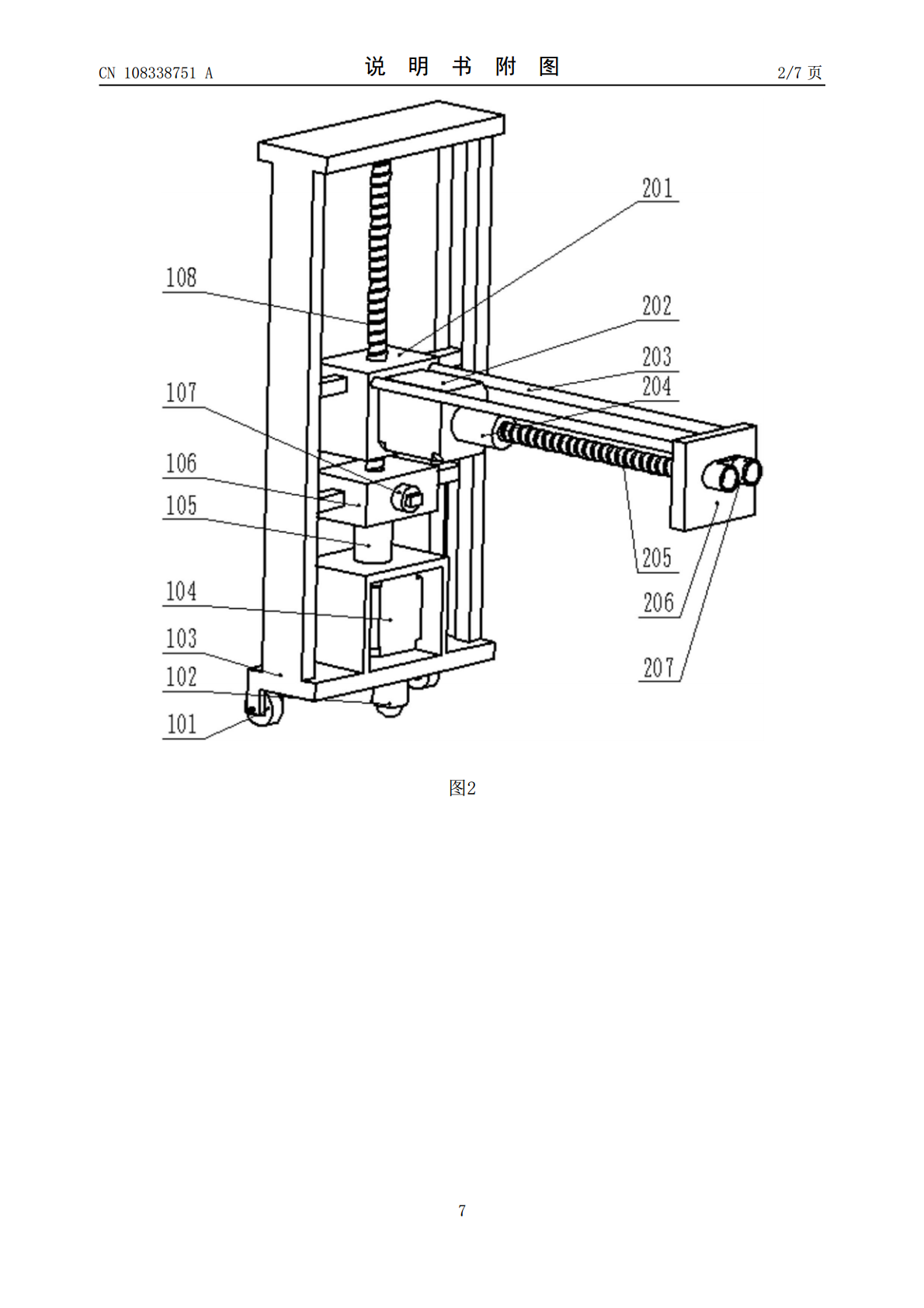
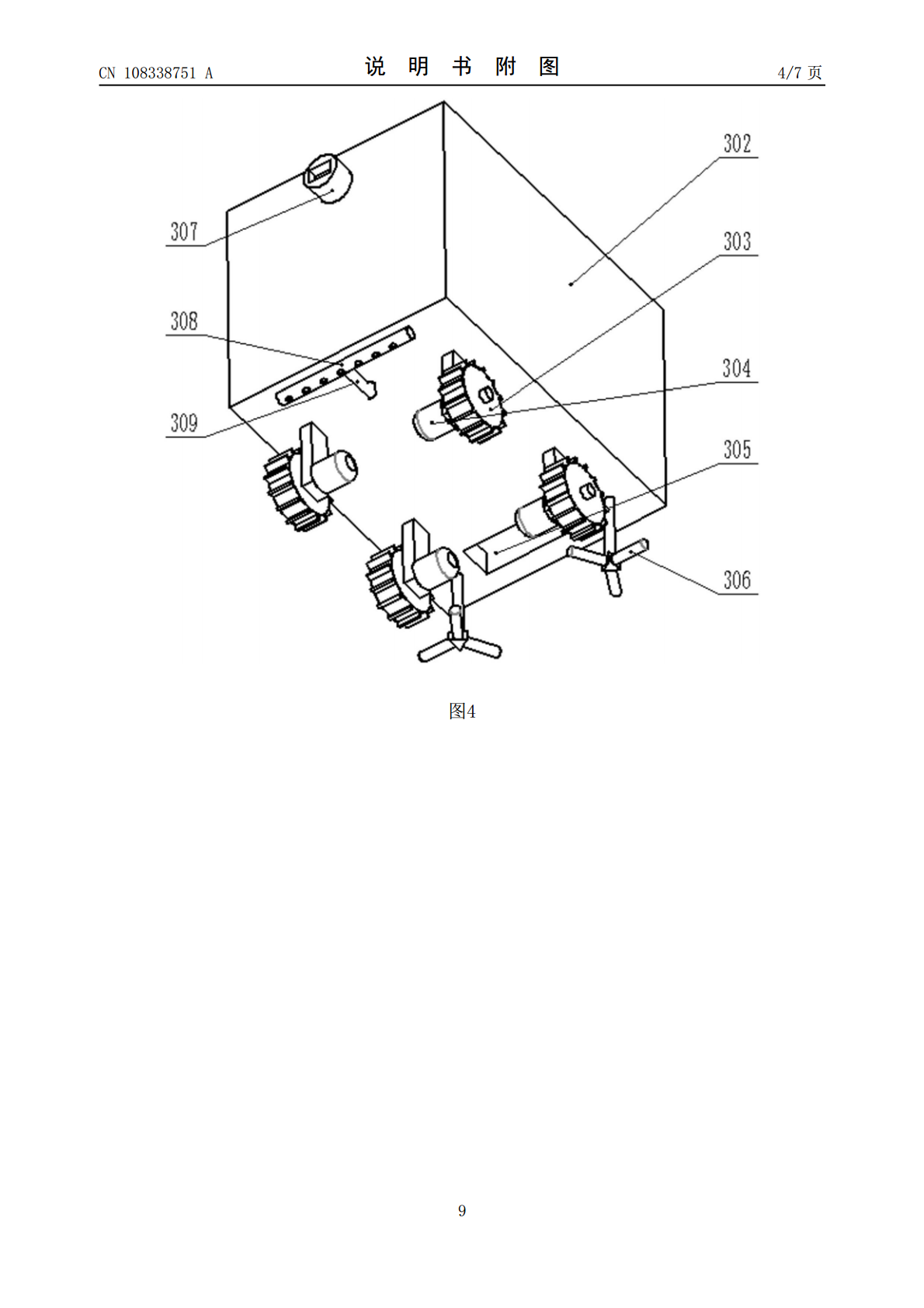
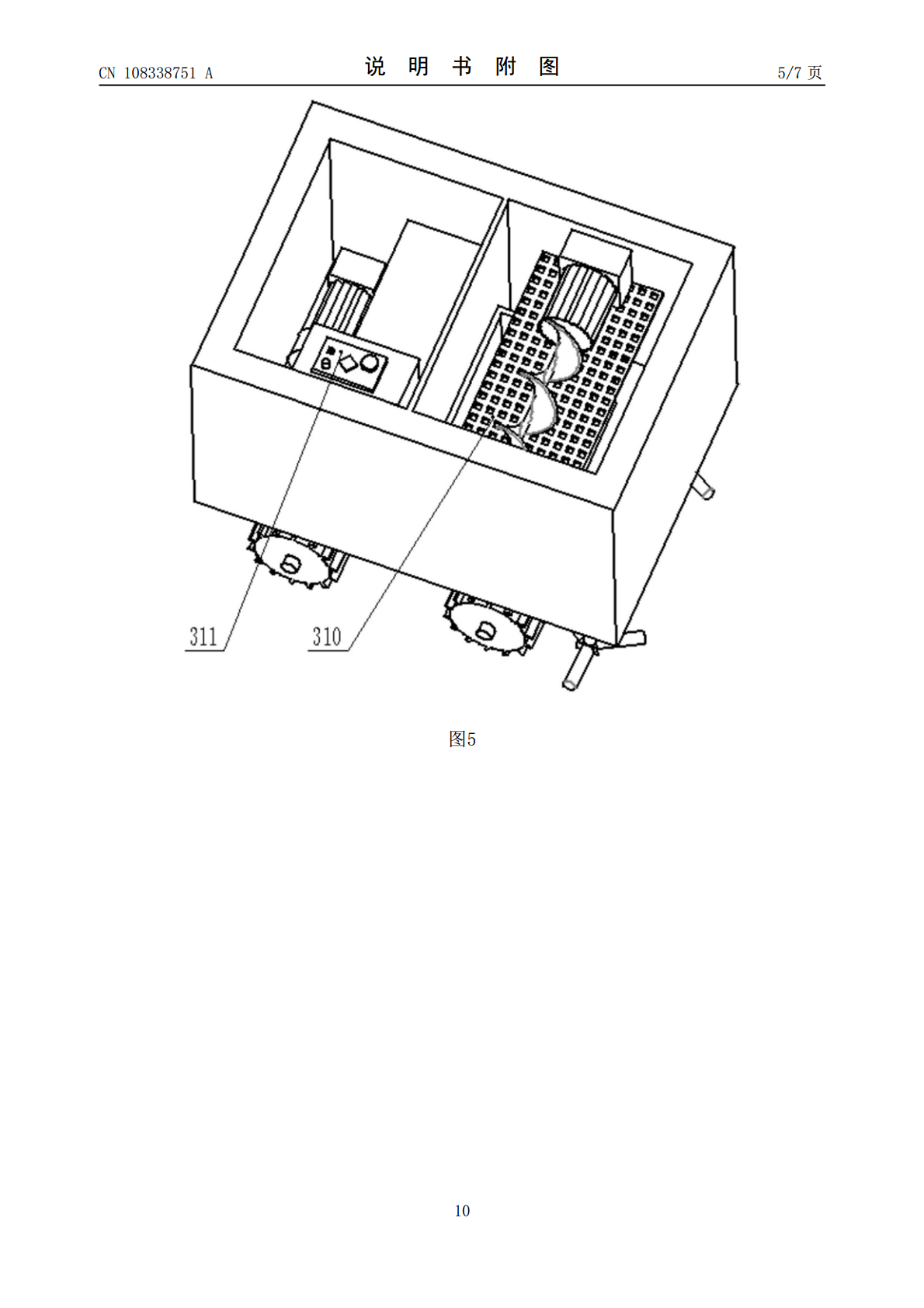
一种楼梯清洁机器人,属于服务机器人领域。是由上升驱动部分、前进驱动部分和工作部分组成的,上升驱动部分具有定向轮、球形万向轮、机架、上升驱动电机、上升联轴器、上升滑块、左楔块和上升丝杠结构,前进驱动部分具有前进滑块、前进驱动电机、前进导轨、前进联轴器、前进丝杠、前进挡板、超声波传感器和前进滑块结构,工作部分具有出气口、车壳、车轮、行进驱动电机、进气口、清洁刷、右楔块、喷雾管、出水管、挡尘盖、控制板、电池、水箱、进水管、水泵、吸水电机、吸尘电机、吸风扇叶和集尘盒结构。该装置通过两组丝杠滑块结构,使该装置完成了
楼梯扶手清洁机器人.pdf
一种楼梯扶手清洁机器人,由攀爬结构与清洁系统构成,所述攀爬结构由往复推进结构与夹持转动结构构成,所述往复推进机构由驱动电机、偏向凸轮、连杆、前滑块、后滑块、导轨光轴、前推块、后推块、推块固定架构成,所述夹持转动结构包括前、后两个夹持手,所述夹持手由凸形回转连接件、夹爪、顶杆、第一压缩弹簧、卡簧构成,前、后夹持手分别可转动地安装在前、后滑块上,夹持手中的顶杆在第一压缩弹簧的作用下顶触在前、后推块上。楼梯扶手清洁机器人的清洁系统,由触发式清洗液喷射装置与清洁刷构成。本发明提出了一种通过巧妙的凸轮顶针机构结合连
楼梯清洁机器人.pdf
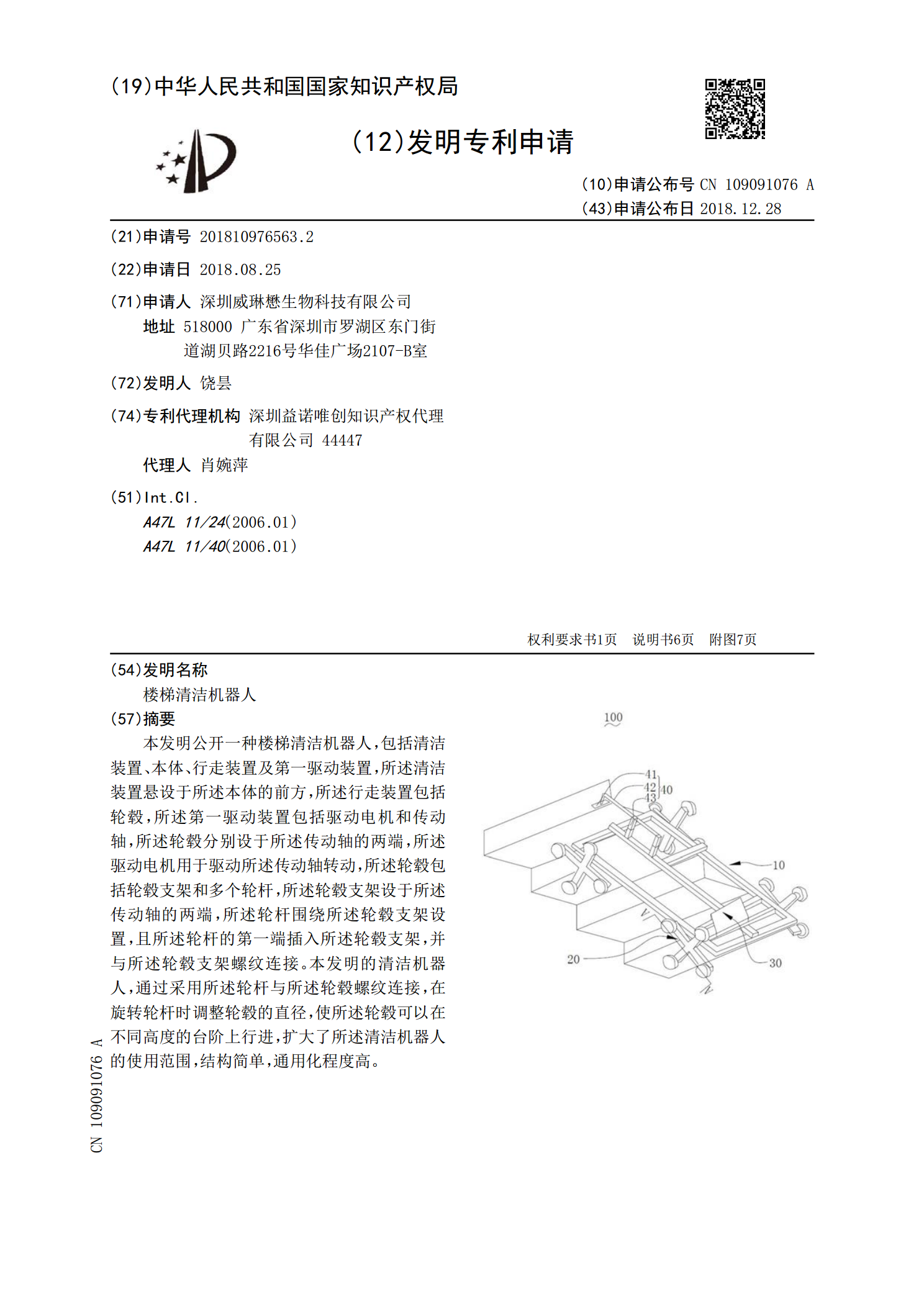
本发明公开一种楼梯清洁机器人,包括清洁装置、本体、行走装置及第一驱动装置,所述清洁装置悬设于所述本体的前方,所述行走装置包括轮毂,所述第一驱动装置包括驱动电机和传动轴,所述轮毂分别设于所述传动轴的两端,所述驱动电机用于驱动所述传动轴转动,所述轮毂包括轮毂支架和多个轮杆,所述轮毂支架设于所述传动轴的两端,所述轮杆围绕所述轮毂支架设置,且所述轮杆的第一端插入所述轮毂支架,并与所述轮毂支架螺纹连接。本发明的清洁机器人,通过采用所述轮杆与所述轮毂螺纹连接,在旋转轮杆时调整轮毂的直径,使所述轮毂可以在不同高度的台阶
一种用于楼梯扶手清洁的机器人.pdf
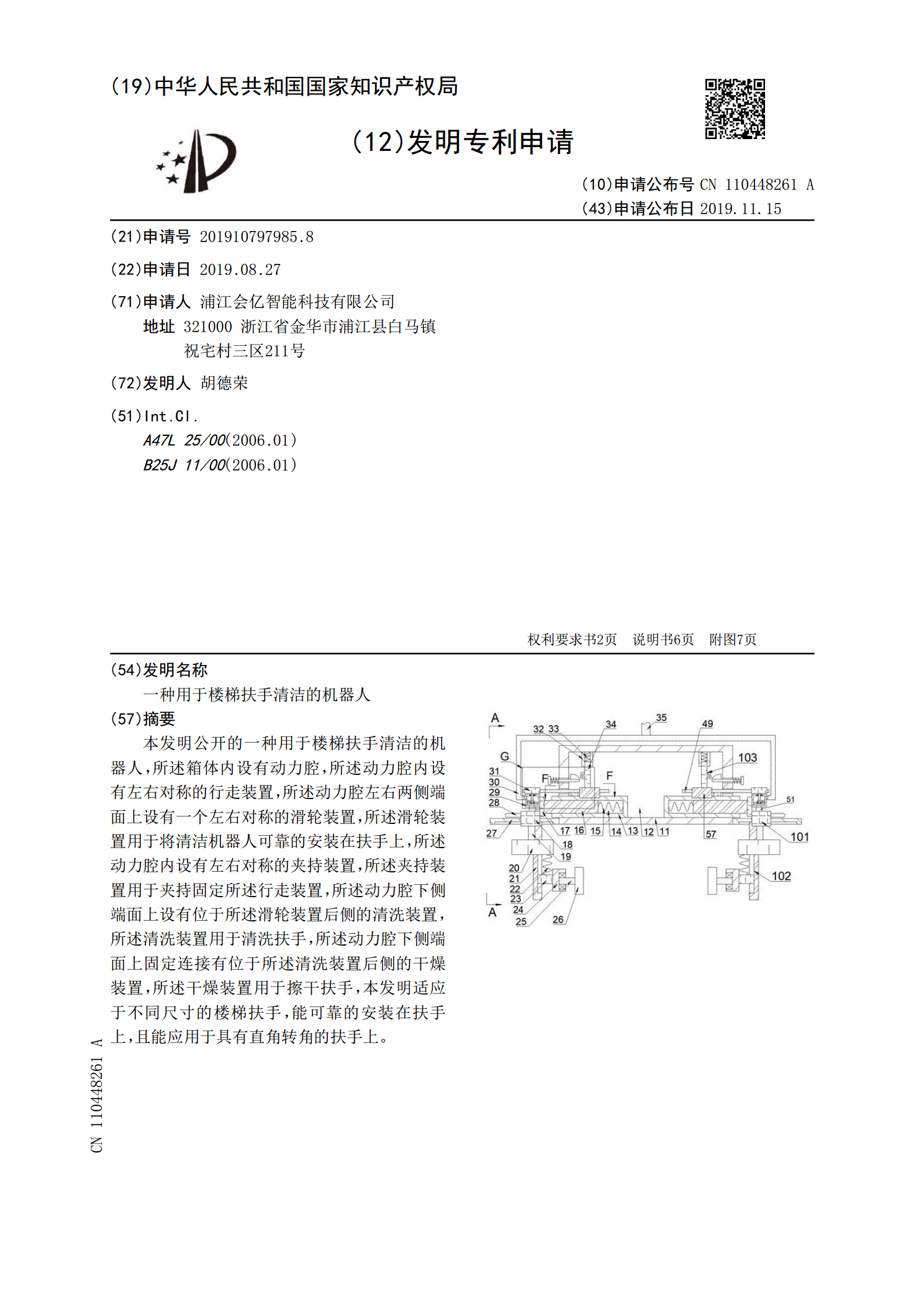
本发明公开的一种用于楼梯扶手清洁的机器人,所述箱体内设有动力腔,所述动力腔内设有左右对称的行走装置,所述动力腔左右两侧端面上设有一个左右对称的滑轮装置,所述滑轮装置用于将清洁机器人可靠的安装在扶手上,所述动力腔内设有左右对称的夹持装置,所述夹持装置用于夹持固定所述行走装置,所述动力腔下侧端面上设有位于所述滑轮装置后侧的清洗装置,所述清洗装置用于清洗扶手,所述动力腔下侧端面上固定连接有位于所述清洗装置后侧的干燥装置,所述干燥装置用于擦干扶手,本发明适应于不同尺寸的楼梯扶手,能可靠的安装在扶手上,且能应用于具
一种楼梯清洁机器人的不转身下楼梯控制方法.pdf
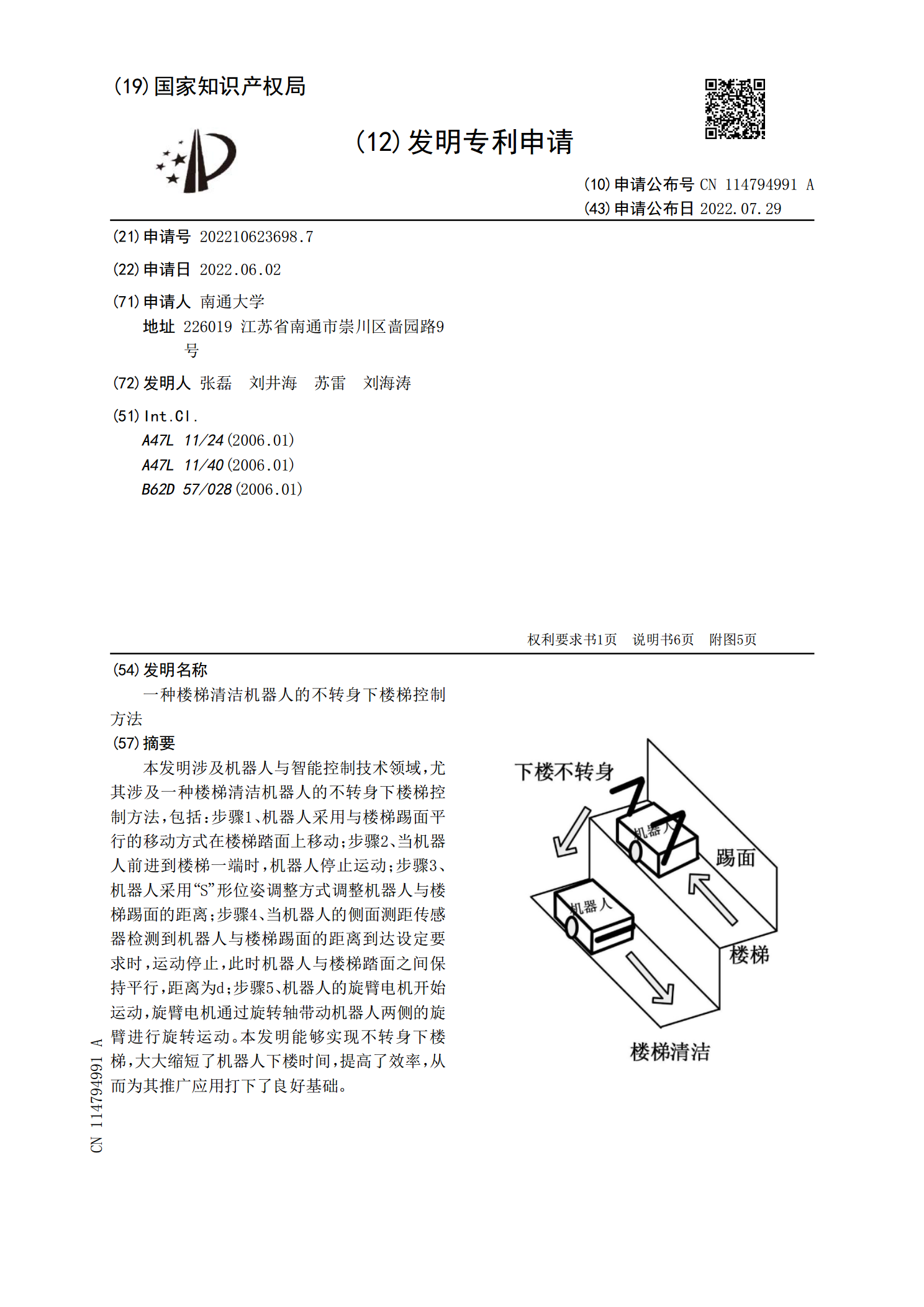
本发明涉及机器人与智能控制技术领域,尤其涉及一种楼梯清洁机器人的不转身下楼梯控制方法,包括:步骤1、机器人采用与楼梯踢面平行的移动方式在楼梯踏面上移动;步骤2、当机器人前进到楼梯一端时,机器人停止运动;步骤3、机器人采用“S”形位姿调整方式调整机器人与楼梯踢面的距离;步骤4、当机器人的侧面测距传感器检测到机器人与楼梯踢面的距离到达设定要求时,运动停止,此时机器人与楼梯踏面之间保持平行,距离为d;步骤5、机器人的旋臂电机开始运动,旋臂电机通过旋转轴带动机器人两侧的旋臂进行旋转运动。本发明能够实现不转身下楼梯