
一种全向移动底盘及其控制方法.pdf

是秋****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种全向移动底盘及其控制方法.pdf
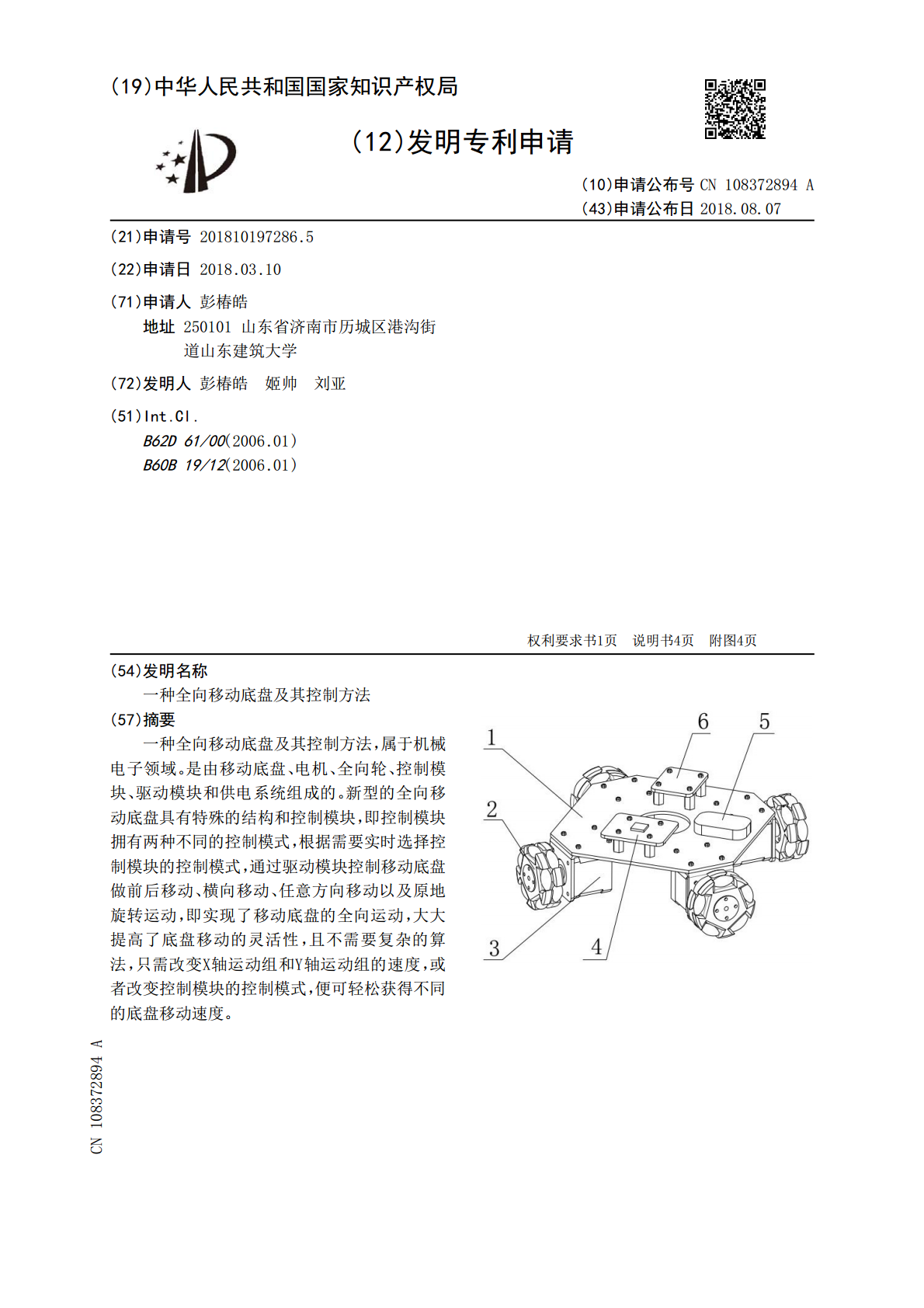
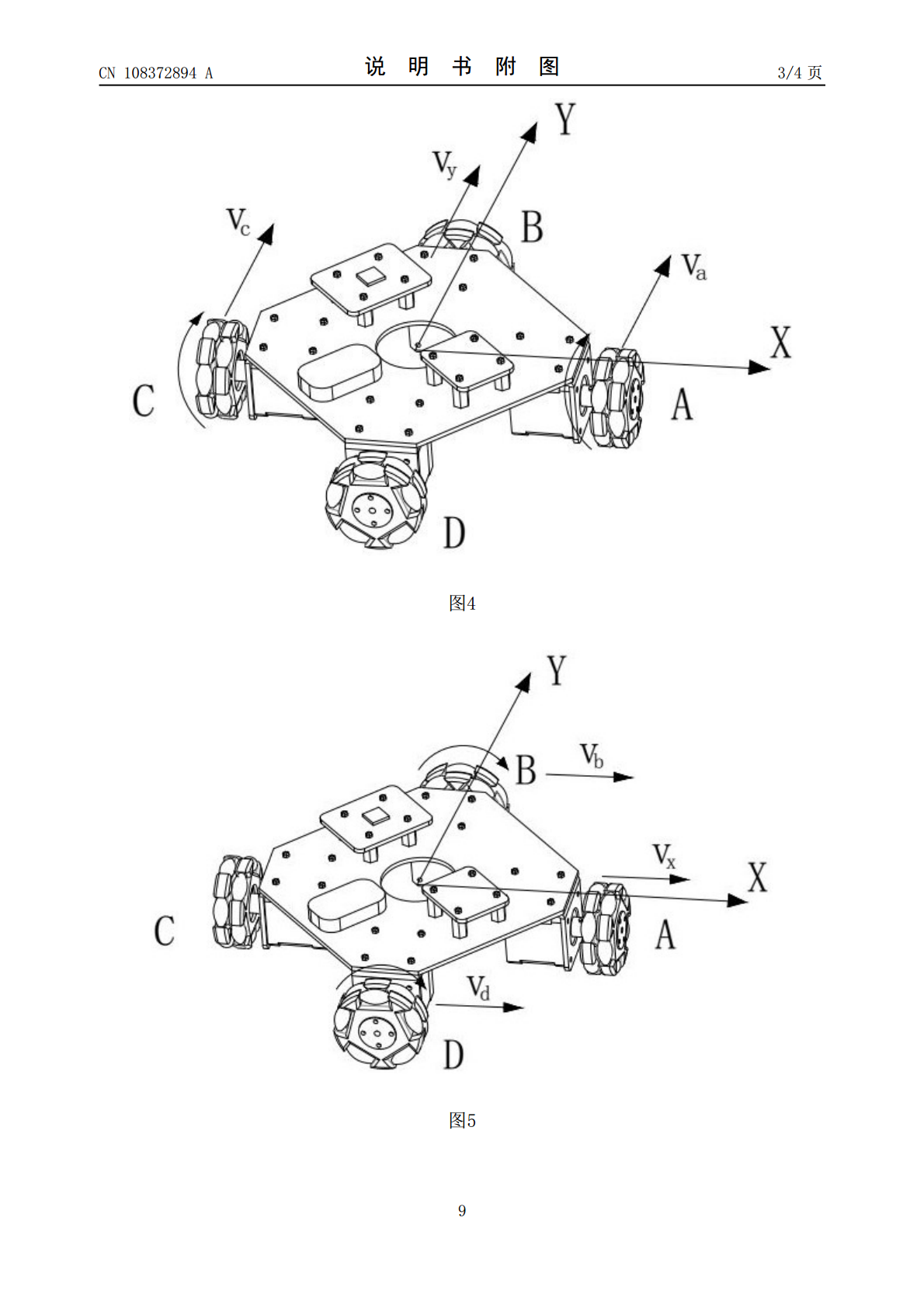
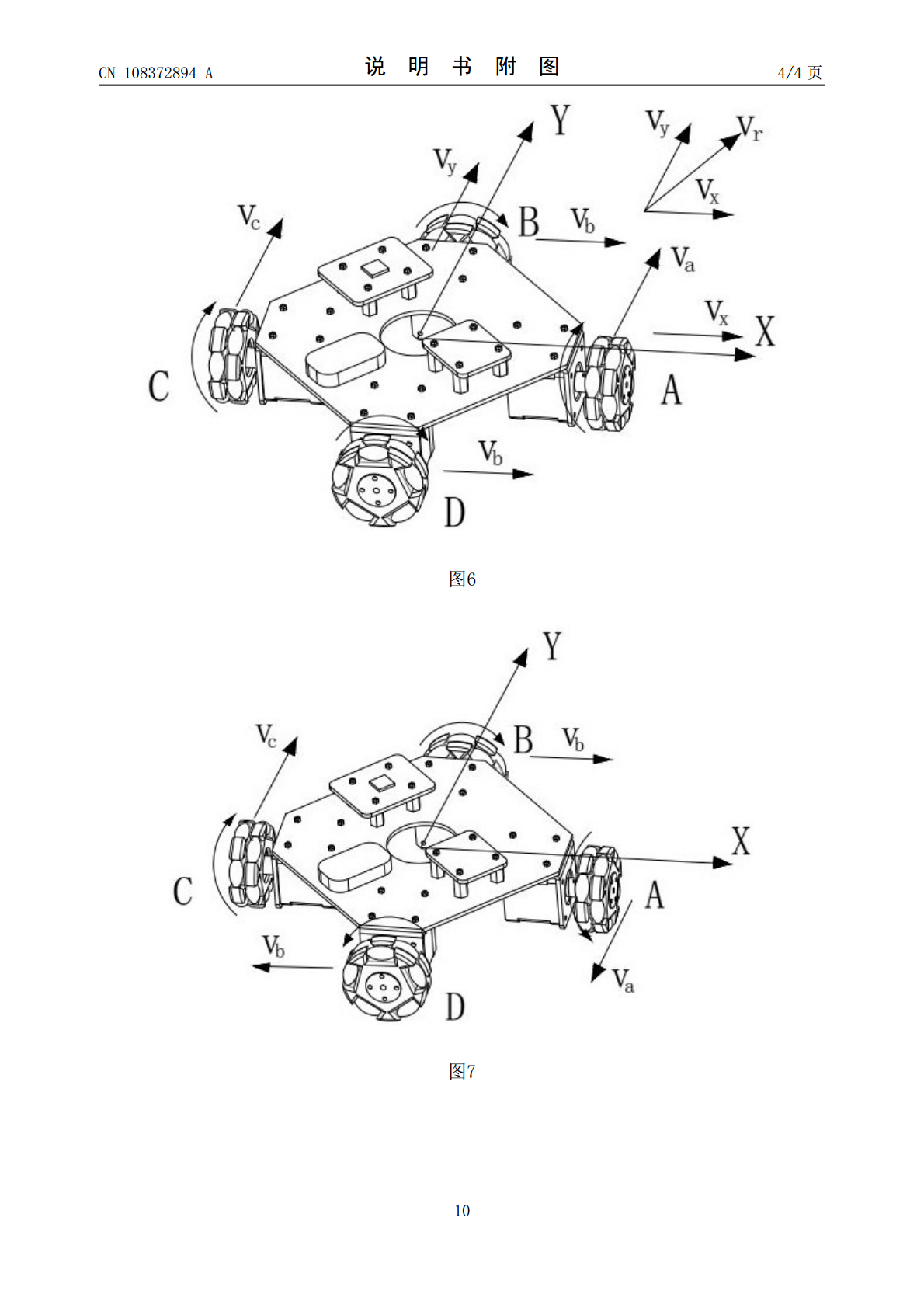
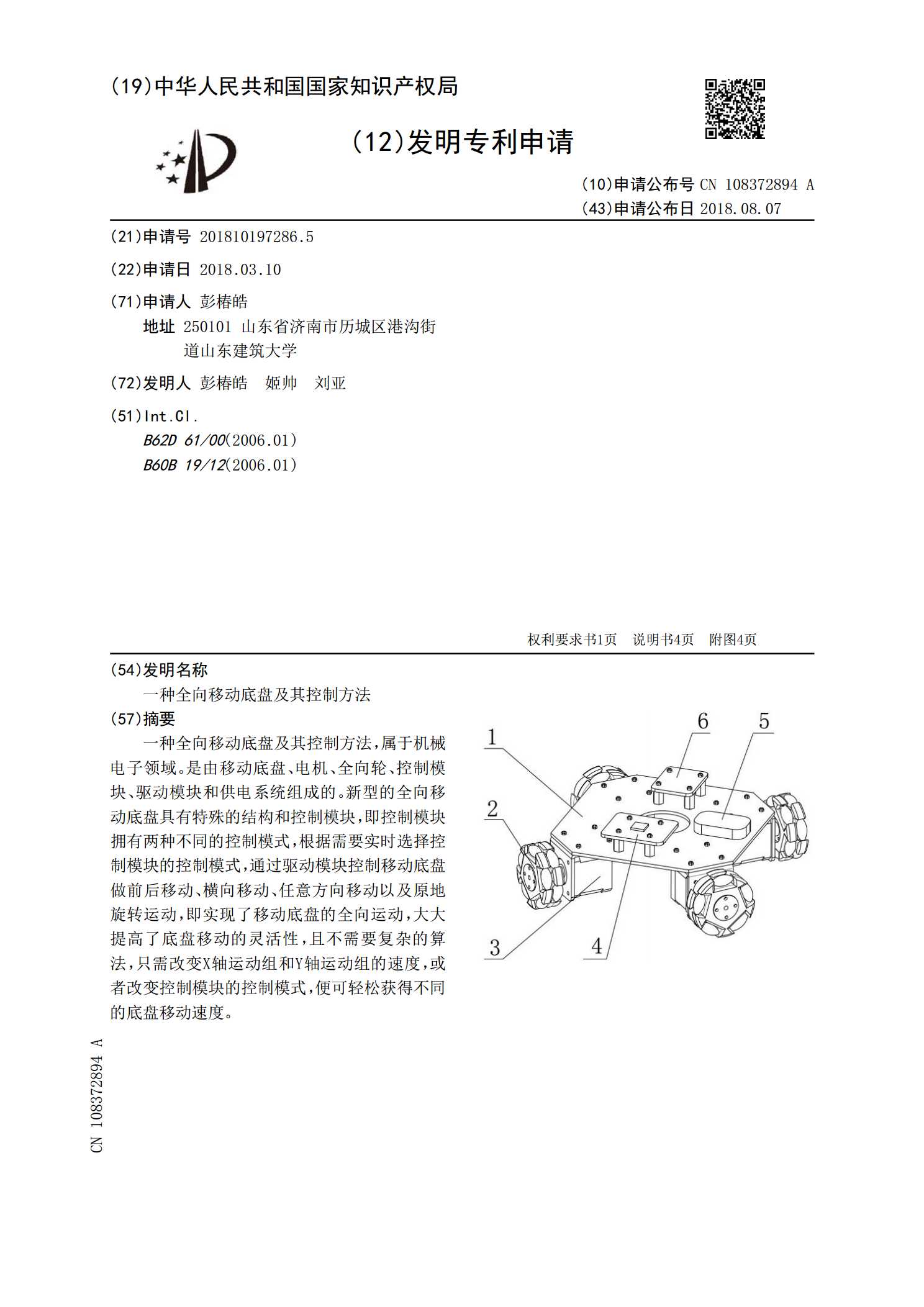
一种全向移动底盘及其控制方法,属于机械电子领域。是由移动底盘、电机、全向轮、控制模块、驱动模块和供电系统组成的。新型的全向移动底盘具有特殊的结构和控制模块,即控制模块拥有两种不同的控制模式,根据需要实时选择控制模块的控制模式,通过驱动模块控制移动底盘做前后移动、横向移动、任意方向移动以及原地旋转运动,即实现了移动底盘的全向运动,大大提高了底盘移动的灵活性,且不需要复杂的算法,只需改变X轴运动组和Y轴运动组的速度,或者改变控制模块的控制模式,便可轻松获得不同的底盘移动速度。

一种轮式全向移动底盘及其控制方法.pdf
本发明公开了一种轮式全向移动底盘及其控制方法,包括底盘,所述底盘包括水平设置的框架和固定在框架内的Y型支架,所述Y型支架包括三条支臂:支臂A、支臂B和支臂C,在三条支臂上分别设置一个电机,在三个电机的输出轴上分别设置一个全向滚轮,每个电机能够带动对应的全向滚轮转动;在Y型支架上还设有控制器和电源,所述控制器与三个电机相连,并能够控制三个电机同时或分别工作;所述电源为控制器和三个电机供电;所述控制方法能够实现底盘的横向移动、前后移动以及原地转动。本发明能够进行横向行驶,转弯半径小,并能够原地转向,从而能够大
全向移动底盘及其调平方法.pdf
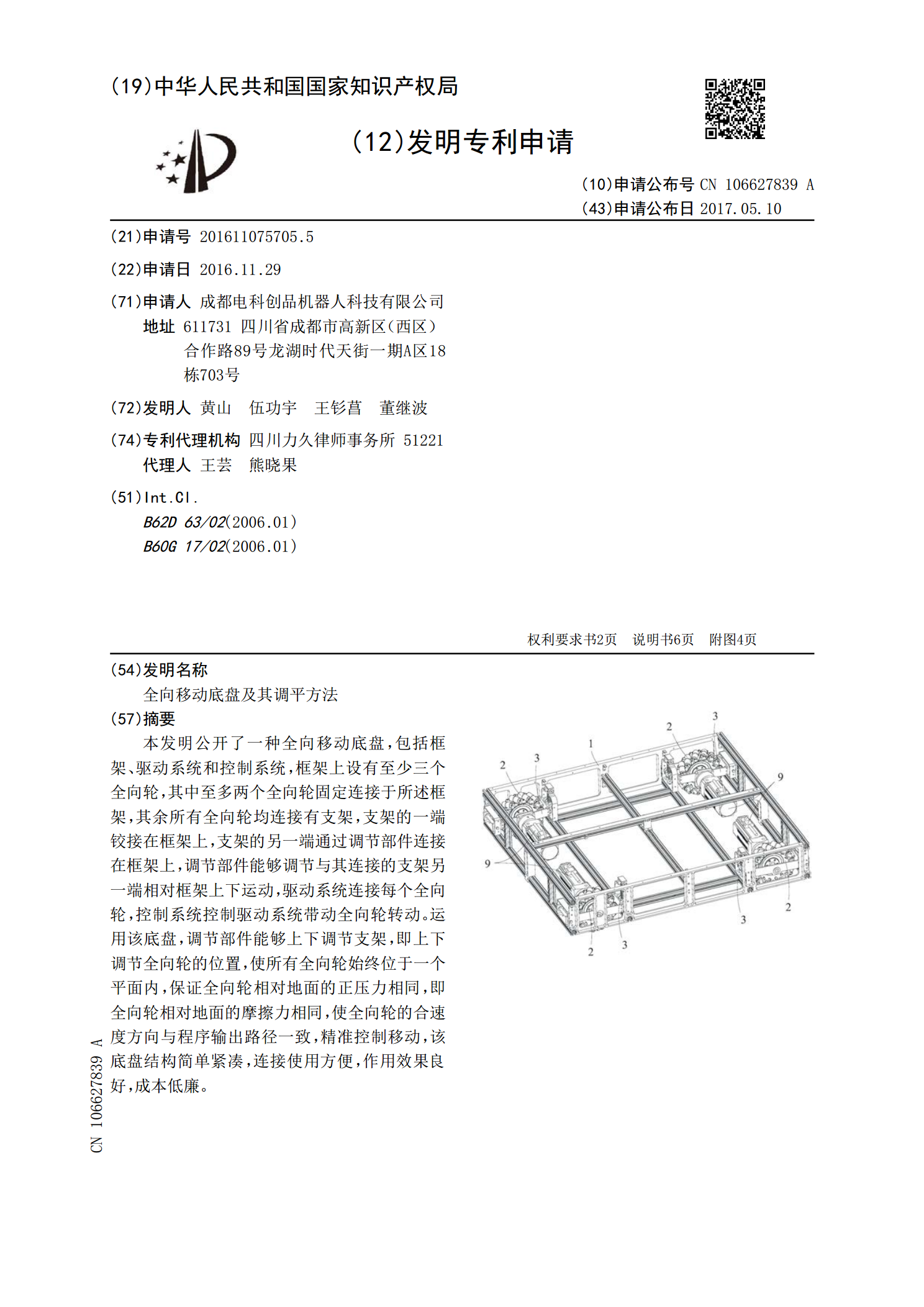
本发明公开了一种全向移动底盘,包括框架、驱动系统和控制系统,框架上设有至少三个全向轮,其中至多两个全向轮固定连接于所述框架,其余所有全向轮均连接有支架,支架的一端铰接在框架上,支架的另一端通过调节部件连接在框架上,调节部件能够调节与其连接的支架另一端相对框架上下运动,驱动系统连接每个全向轮,控制系统控制驱动系统带动全向轮转动。运用该底盘,调节部件能够上下调节支架,即上下调节全向轮的位置,使所有全向轮始终位于一个平面内,保证全向轮相对地面的正压力相同,即全向轮相对地面的摩擦力相同,使全向轮的合速度方向与程序
一种全向移动的底盘、全向移动的底盘系统及机器人系统.pdf
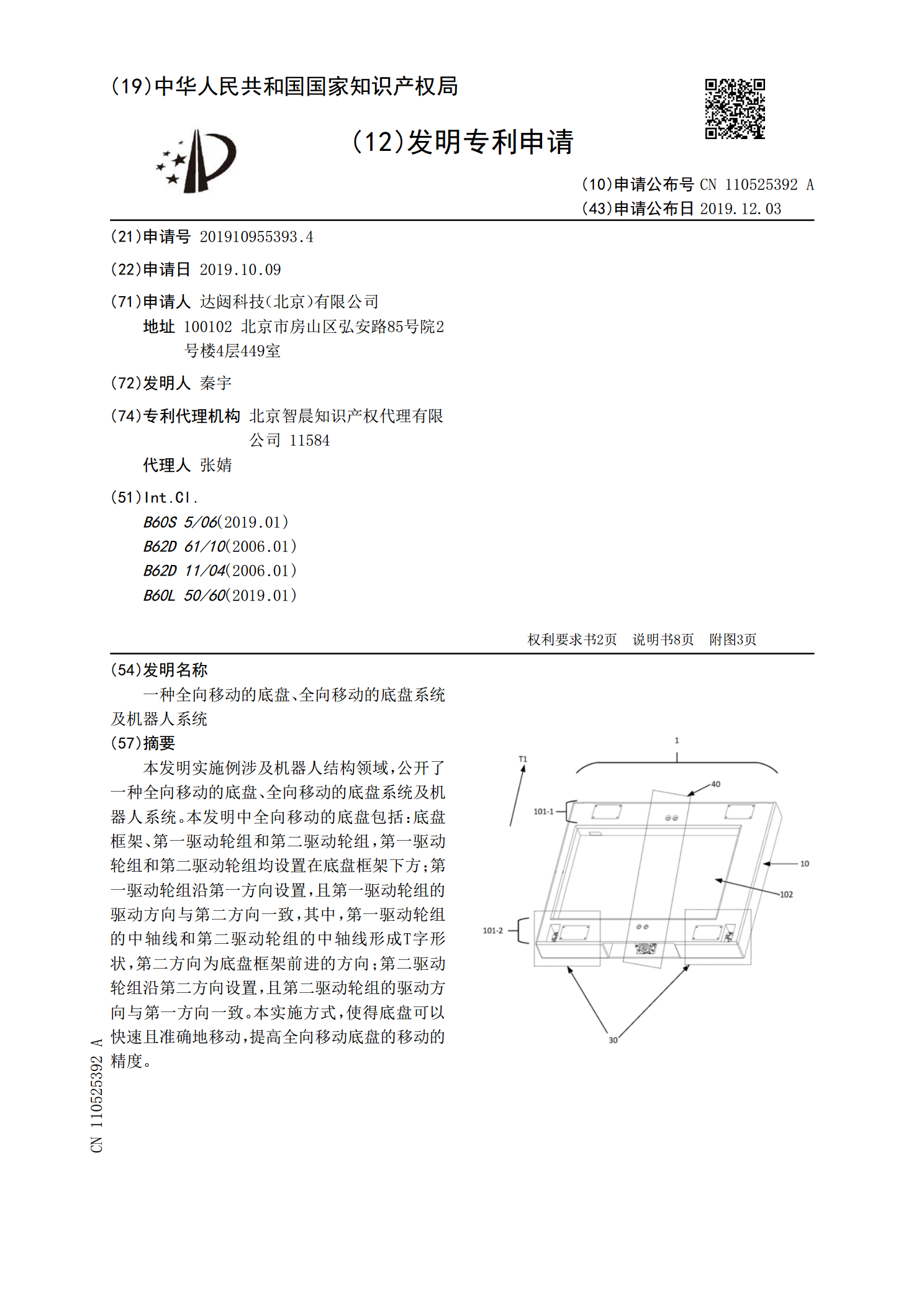
本发明实施例涉及机器人结构领域,公开了一种全向移动的底盘、全向移动的底盘系统及机器人系统。本发明中全向移动的底盘包括:底盘框架、第一驱动轮组和第二驱动轮组,第一驱动轮组和第二驱动轮组均设置在底盘框架下方;第一驱动轮组沿第一方向设置,且第一驱动轮组的驱动方向与第二方向一致,其中,第一驱动轮组的中轴线和第二驱动轮组的中轴线形成T字形状,第二方向为底盘框架前进的方向;第二驱动轮组沿第二方向设置,且第二驱动轮组的驱动方向与第一方向一致。本实施方式,使得底盘可以快速且准确地移动,提高全向移动底盘的移动的精度。
全向移动装置及其姿态控制方法.pdf
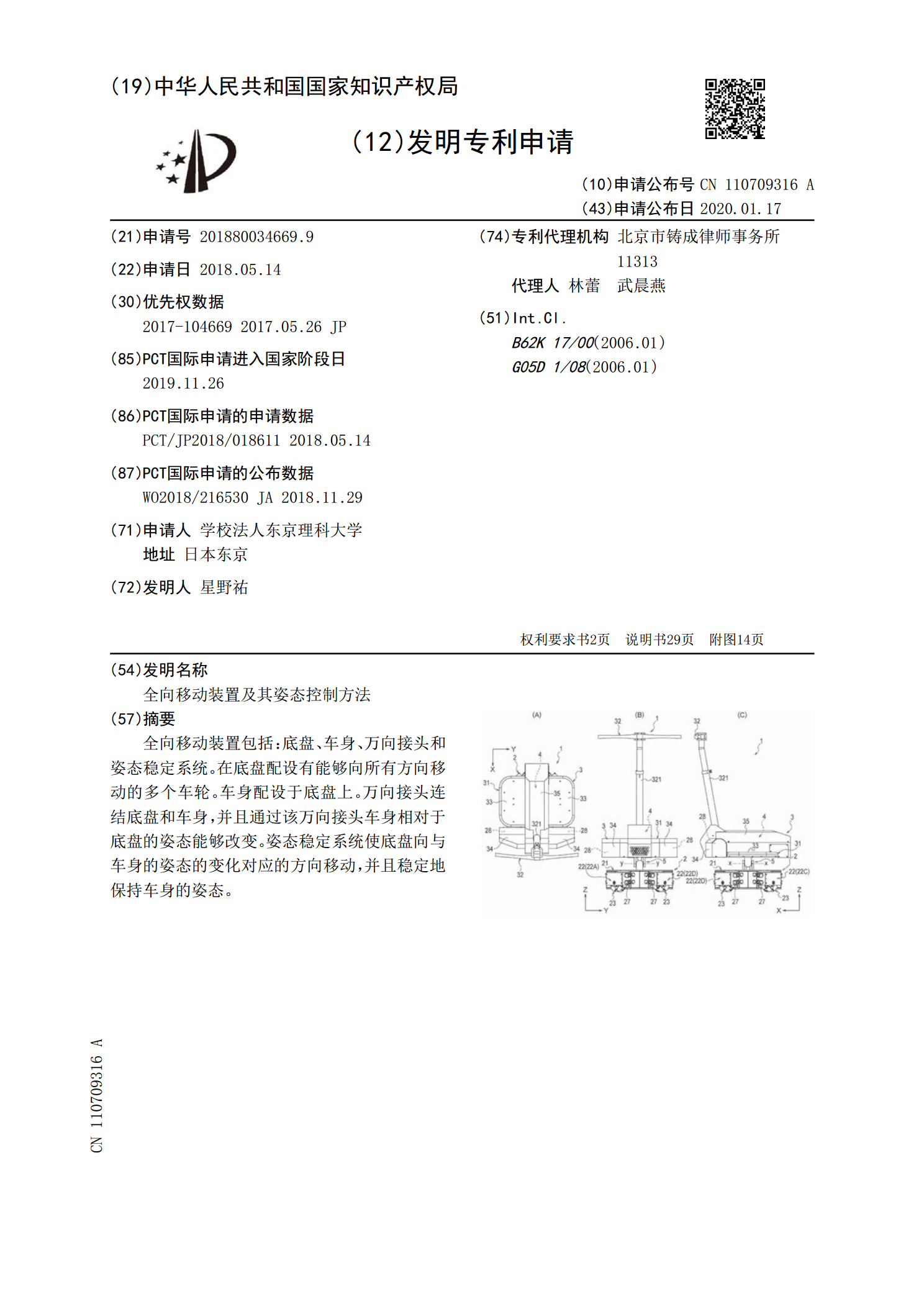
全向移动装置包括:底盘、车身、万向接头和姿态稳定系统。在底盘配设有能够向所有方向移动的多个车轮。车身配设于底盘上。万向接头连结底盘和车身,并且通过该万向接头车身相对于底盘的姿态能够改变。姿态稳定系统使底盘向与车身的姿态的变化对应的方向移动,并且稳定地保持车身的姿态。