
一种柑橘采摘机器人的末端执行器.pdf

文光****iu

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种柑橘采摘机器人的末端执行器.pdf
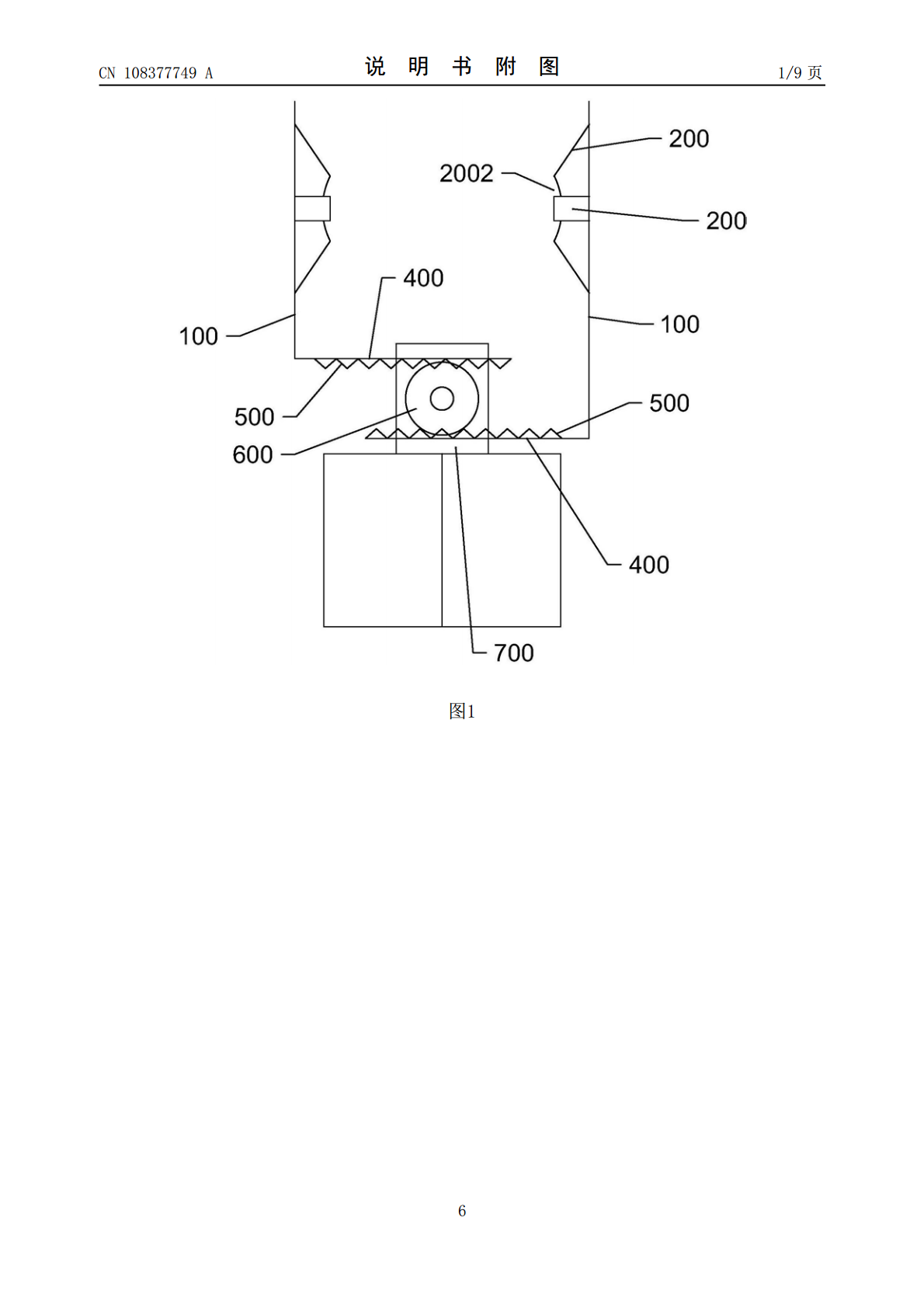
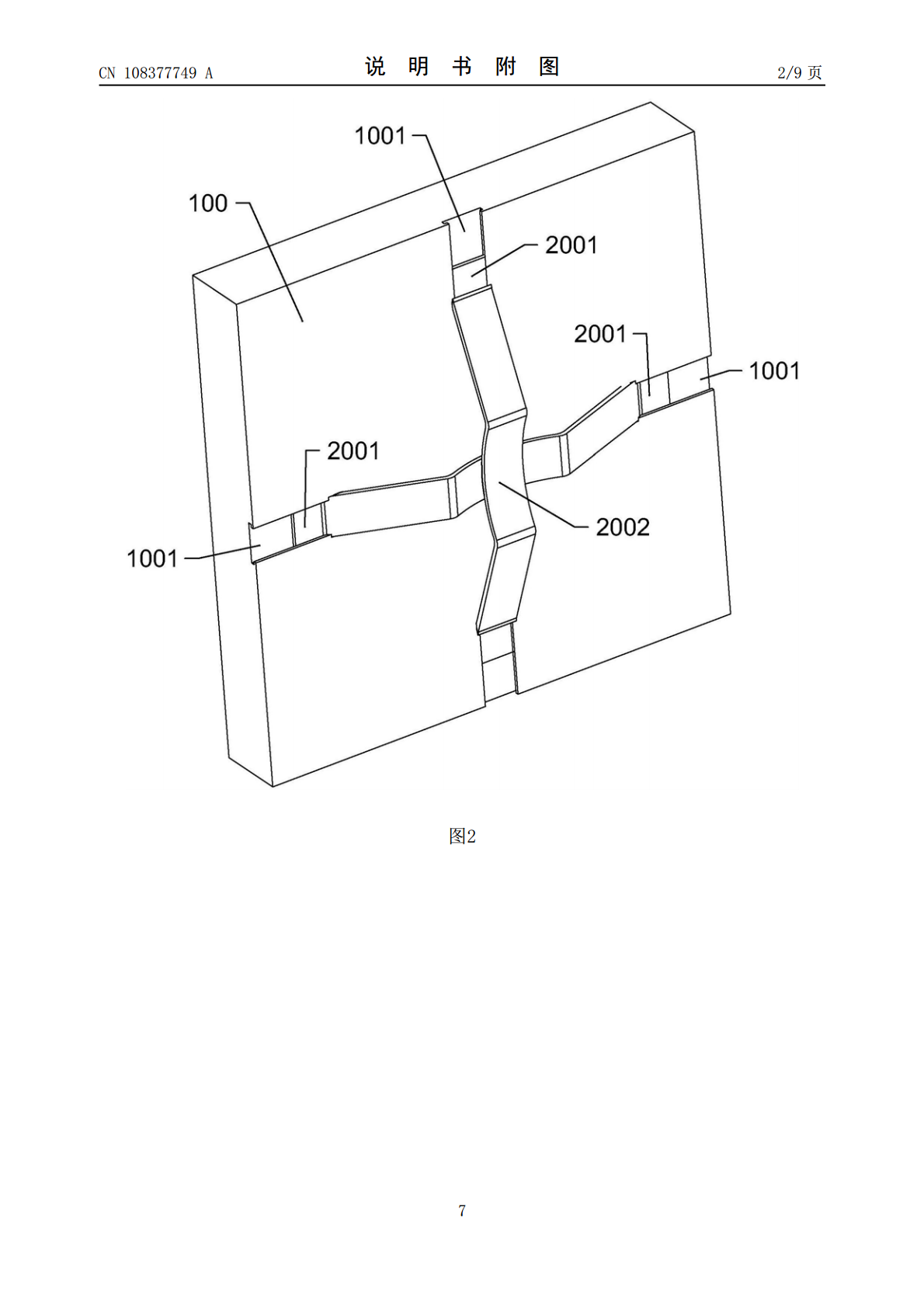
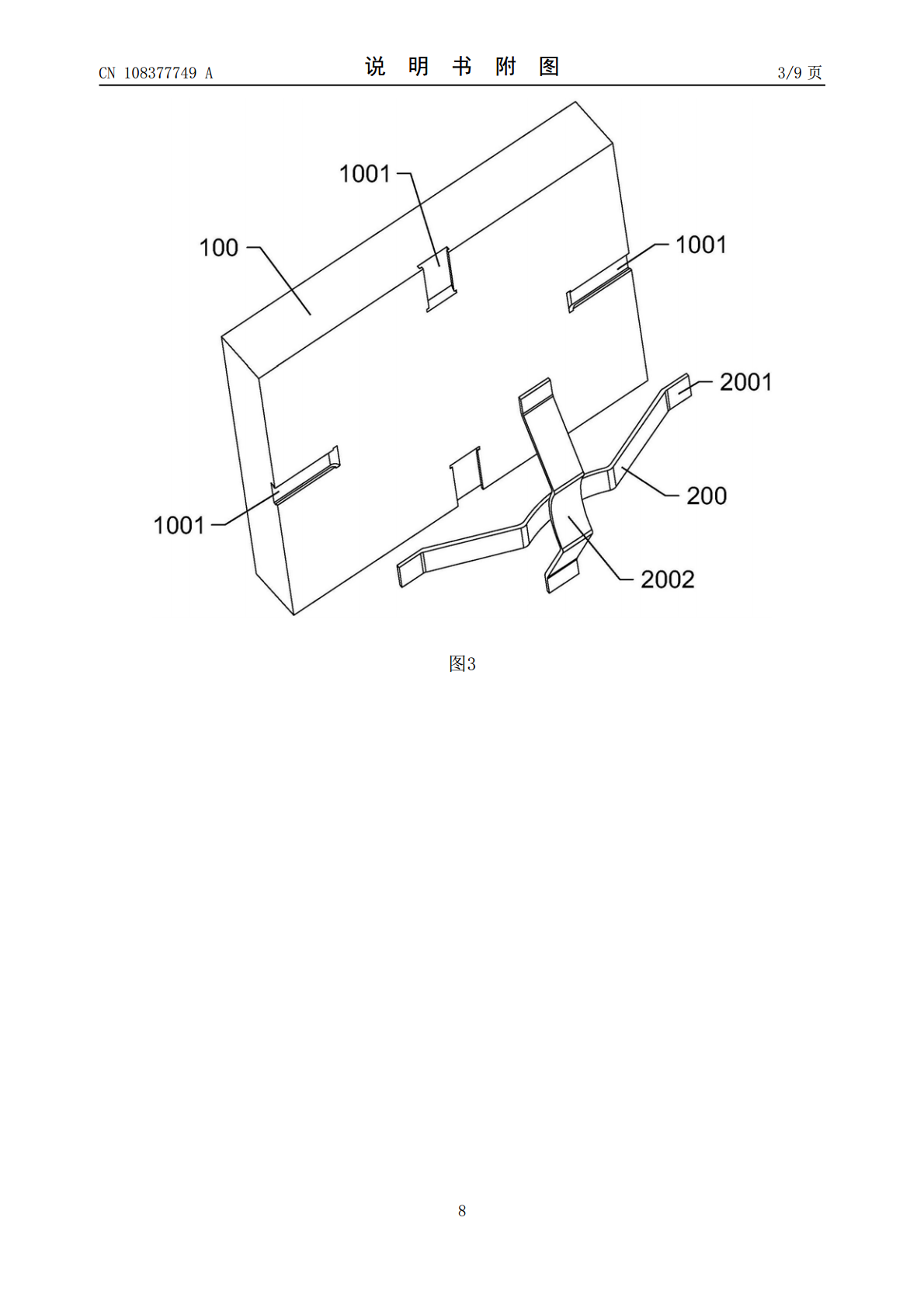
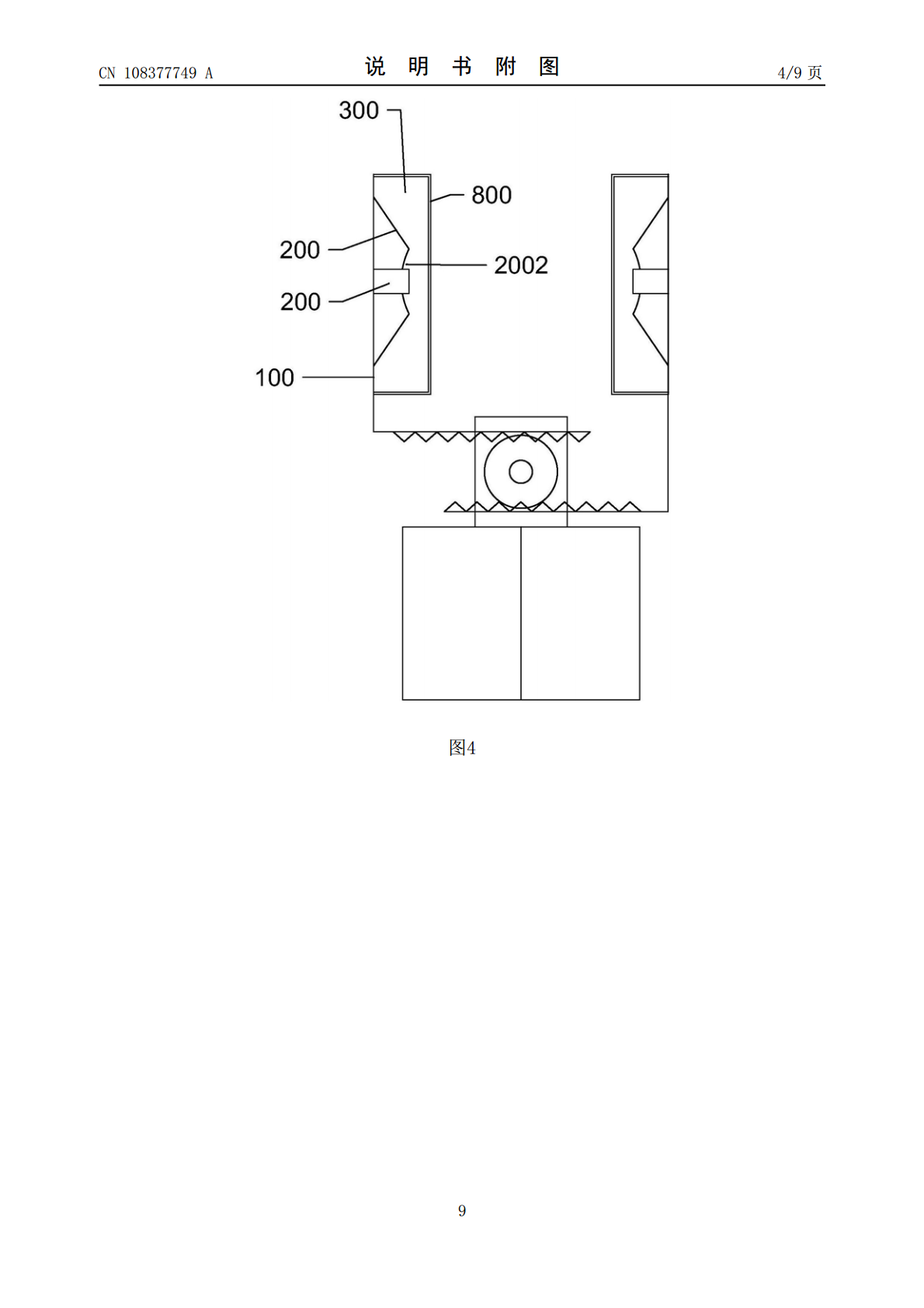
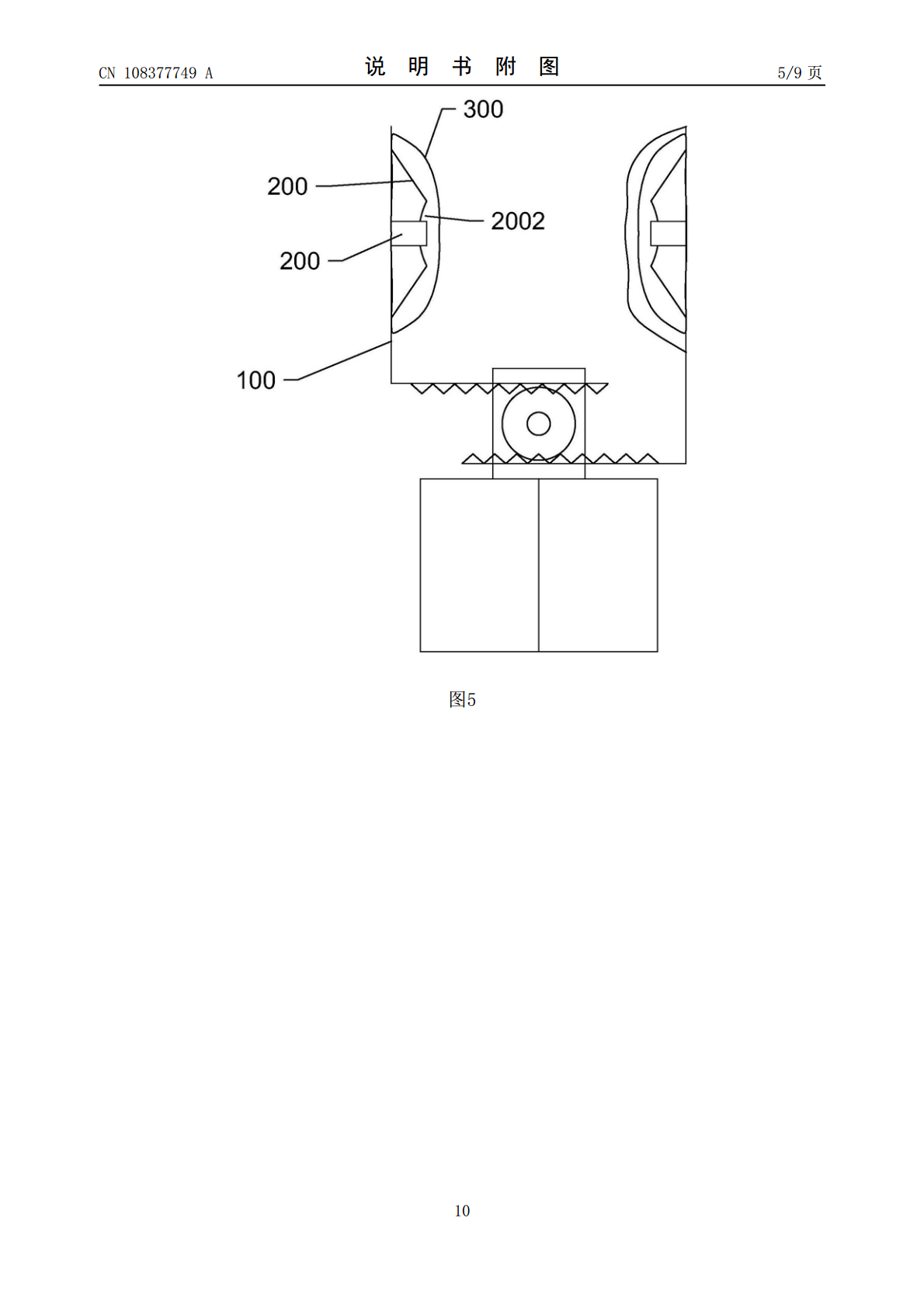
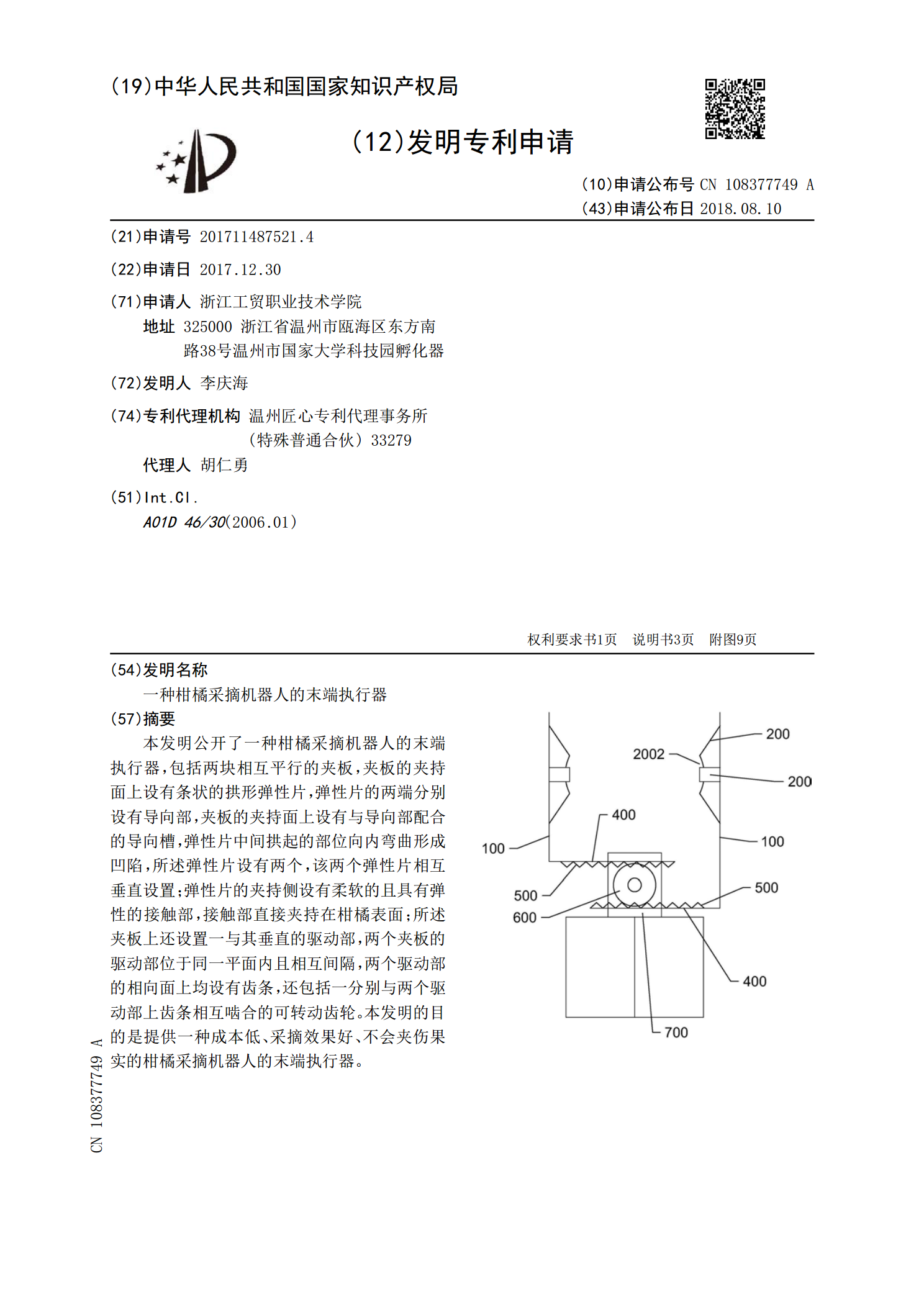
本发明公开了一种柑橘采摘机器人的末端执行器,包括两块相互平行的夹板,夹板的夹持面上设有条状的拱形弹性片,弹性片的两端分别设有导向部,夹板的夹持面上设有与导向部配合的导向槽,弹性片中间拱起的部位向内弯曲形成凹陷,所述弹性片设有两个,该两个弹性片相互垂直设置;弹性片的夹持侧设有柔软的且具有弹性的接触部,接触部直接夹持在柑橘表面;所述夹板上还设置一与其垂直的驱动部,两个夹板的驱动部位于同一平面内且相互间隔,两个驱动部的相向面上均设有齿条,还包括一分别与两个驱动部上齿条相互啮合的可转动齿轮。本发明的目的是提供一种
一种柑橘采摘人体辅助末端执行器.pdf
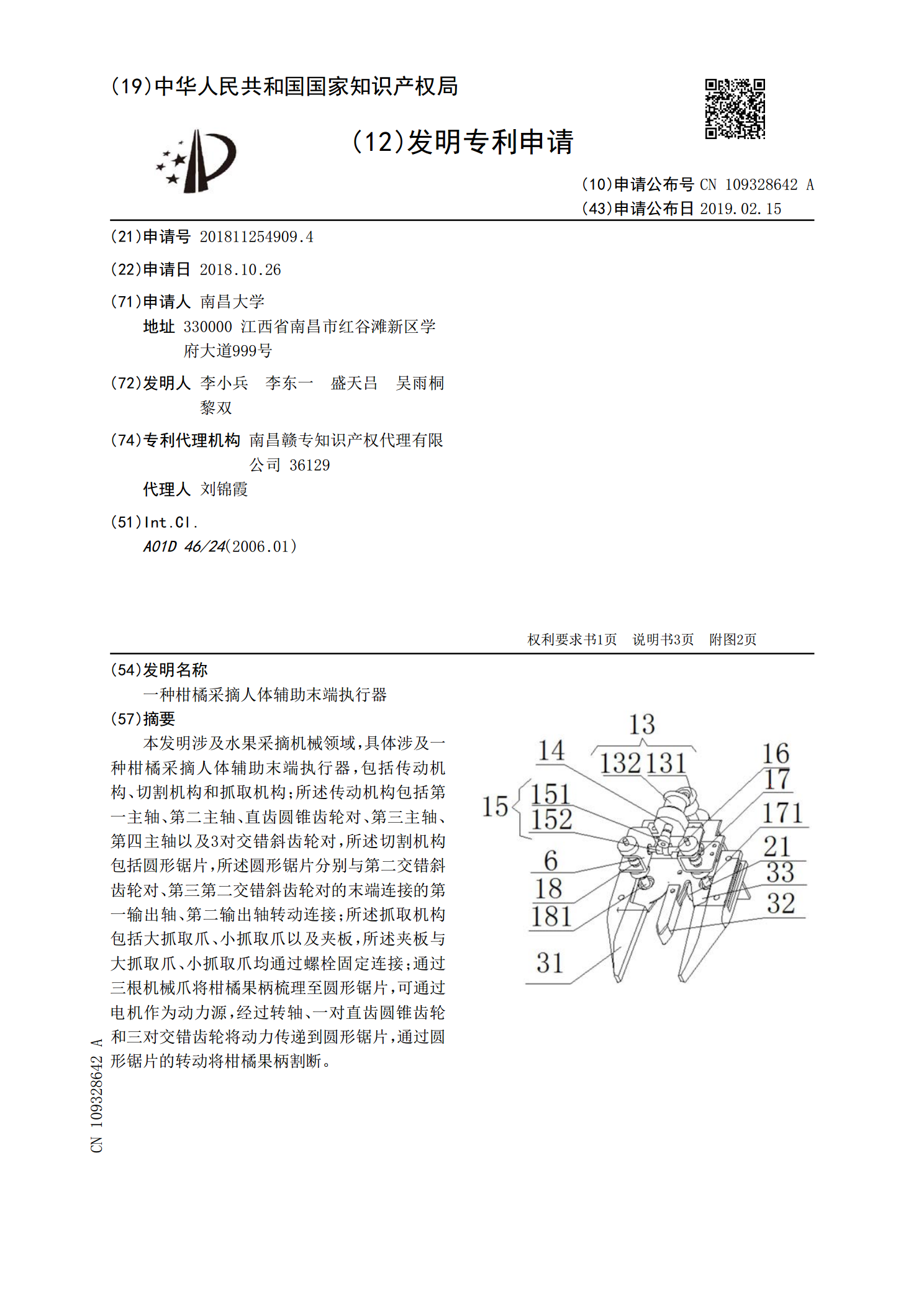
本发明涉及水果采摘机械领域,具体涉及一种柑橘采摘人体辅助末端执行器,包括传动机构、切割机构和抓取机构;所述传动机构包括第一主轴、第二主轴、直齿圆锥齿轮对、第三主轴、第四主轴以及3对交错斜齿轮对,所述切割机构包括圆形锯片,所述圆形锯片分别与第二交错斜齿轮对、第三第二交错斜齿轮对的末端连接的第一输出轴、第二输出轴转动连接;所述抓取机构包括大抓取爪、小抓取爪以及夹板,所述夹板与大抓取爪、小抓取爪均通过螺栓固定连接;通过三根机械爪将柑橘果柄梳理至圆形锯片,可通过电机作为动力源,经过转轴、一对直齿圆锥齿轮和三对交错
一种气囊式柑橘采摘机械手末端执行器.pdf
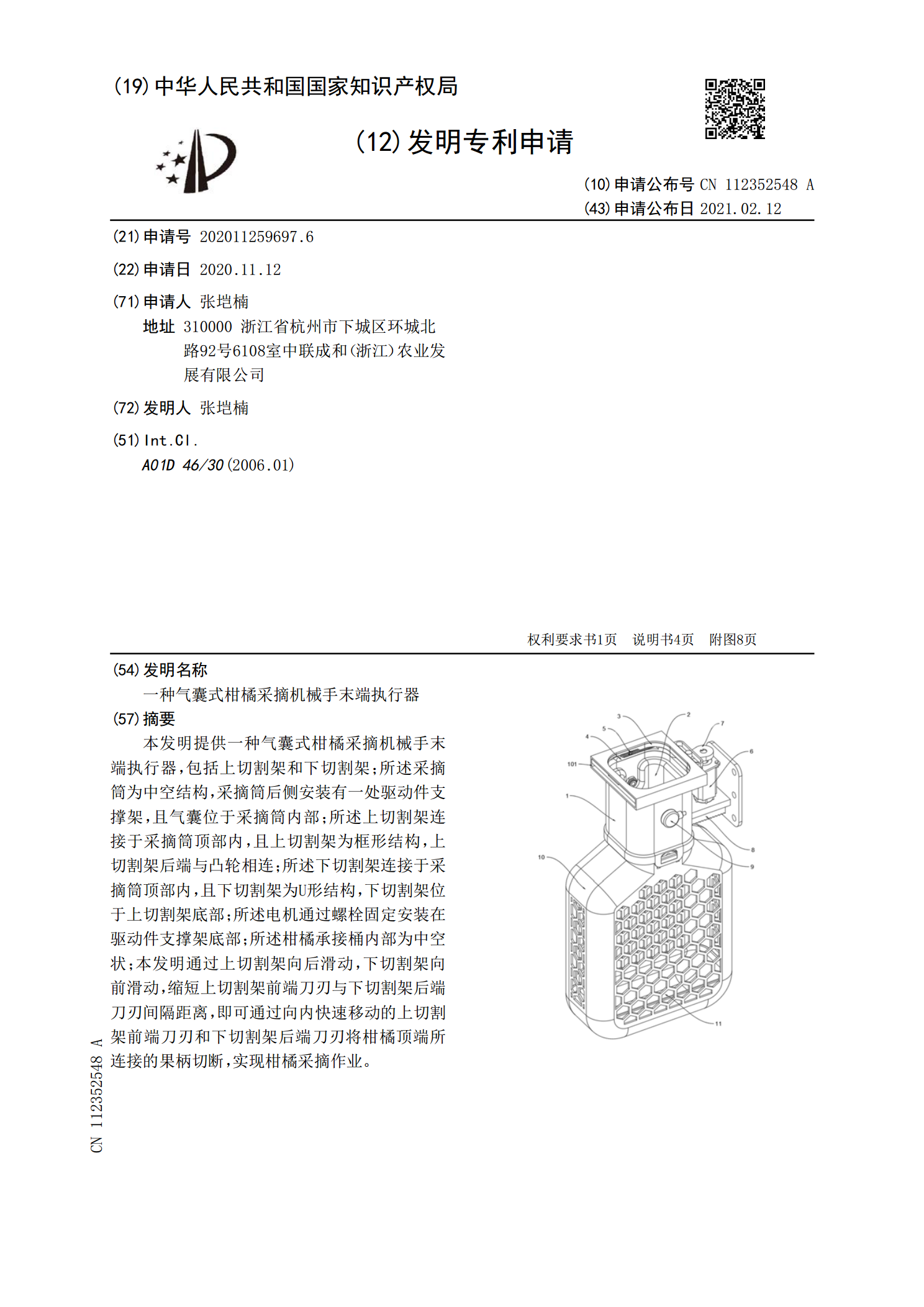
本发明提供一种气囊式柑橘采摘机械手末端执行器,包括上切割架和下切割架;所述采摘筒为中空结构,采摘筒后侧安装有一处驱动件支撑架,且气囊位于采摘筒内部;所述上切割架连接于采摘筒顶部内,且上切割架为框形结构,上切割架后端与凸轮相连;所述下切割架连接于采摘筒顶部内,且下切割架为U形结构,下切割架位于上切割架底部;所述电机通过螺栓固定安装在驱动件支撑架底部;所述柑橘承接桶内部为中空状;本发明通过上切割架向后滑动,下切割架向前滑动,缩短上切割架前端刀刃与下切割架后端刀刃间隔距离,即可通过向内快速移动的上切割架前端刀刃
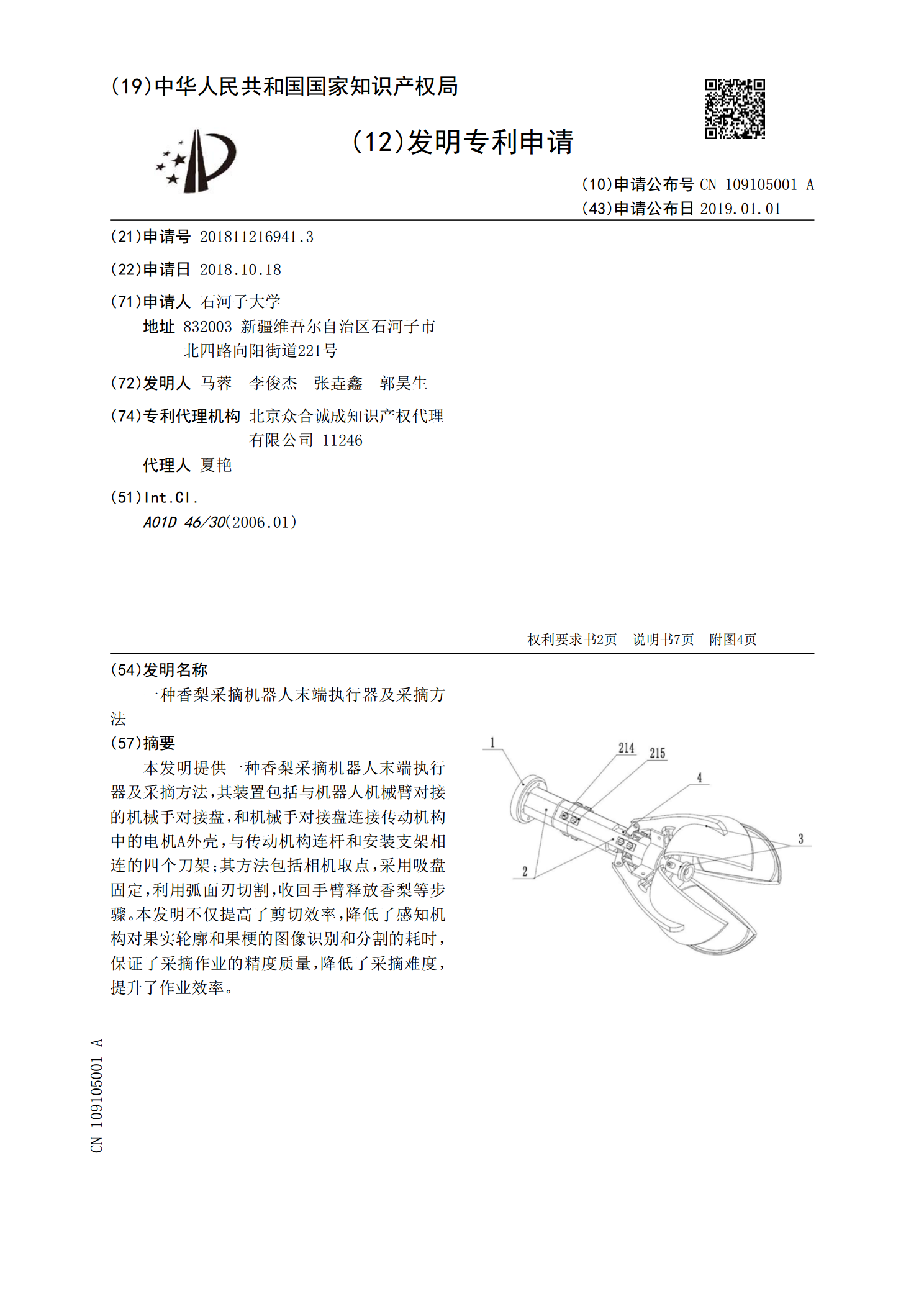
一种香梨采摘机器人末端执行器及采摘方法.pdf
本发明提供一种香梨采摘机器人末端执行器及采摘方法,其装置包括与机器人机械臂对接的机械手对接盘,和机械手对接盘连接传动机构中的电机A外壳,与传动机构连杆和安装支架相连的四个刀架;其方法包括相机取点,采用吸盘固定,利用弧面刃切割,收回手臂释放香梨等步骤。本发明不仅提高了剪切效率,降低了感知机构对果实轮廓和果梗的图像识别和分割的耗时,保证了采摘作业的精度质量,降低了采摘难度,提升了作业效率。
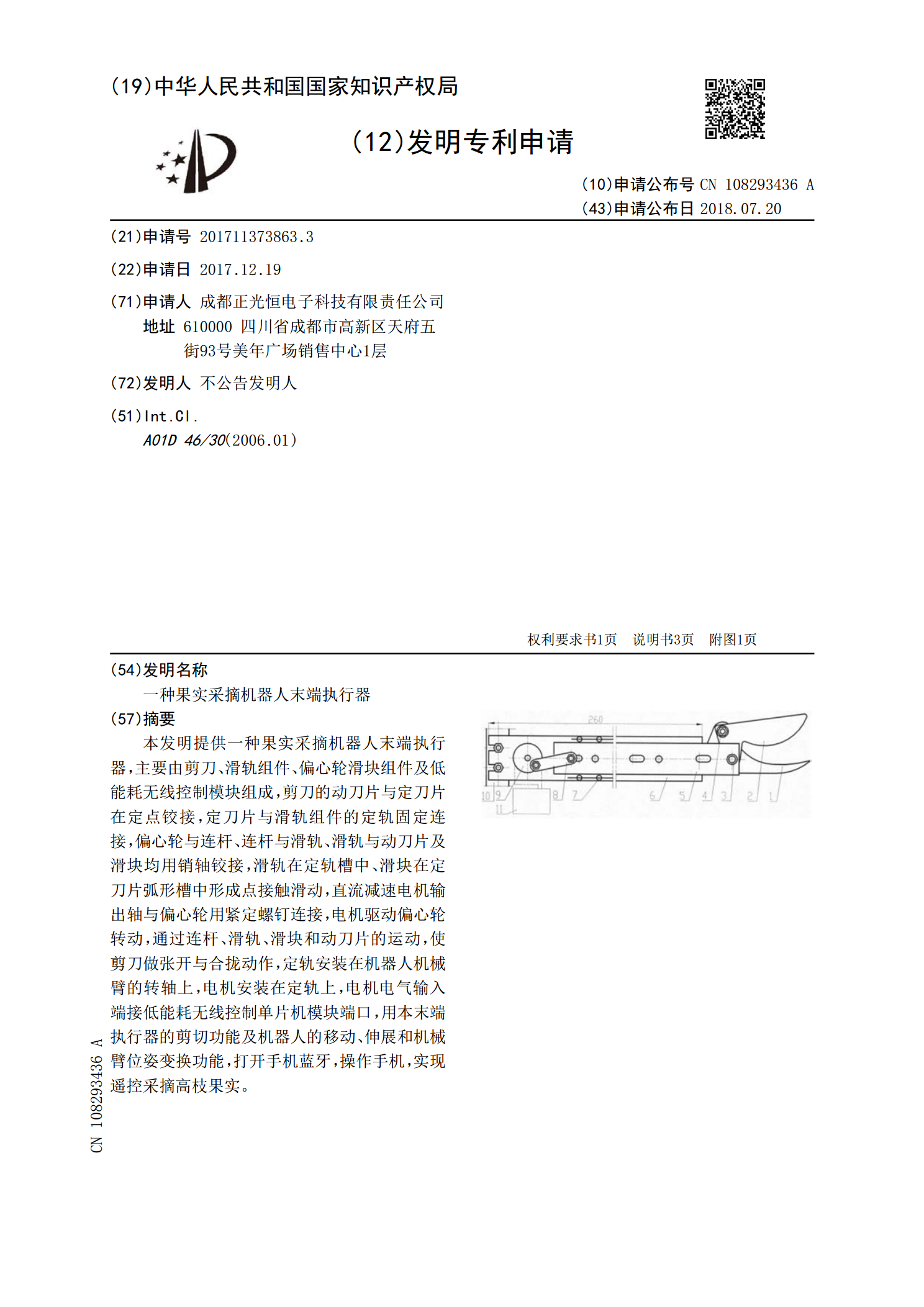
一种果实采摘机器人末端执行器.pdf
本发明提供一种果实采摘机器人末端执行器,主要由剪刀、滑轨组件、偏心轮滑块组件及低能耗无线控制模块组成,剪刀的动刀片与定刀片在定点铰接,定刀片与滑轨组件的定轨固定连接,偏心轮与连杆、连杆与滑轨、滑轨与动刀片及滑块均用销轴铰接,滑轨在定轨槽中、滑块在定刀片弧形槽中形成点接触滑动,直流减速电机输出轴与偏心轮用紧定螺钉连接,电机驱动偏心轮转动,通过连杆、滑轨、滑块和动刀片的运动,使剪刀做张开与合拢动作,定轨安装在机器人机械臂的转轴上,电机安装在定轨上,电机电气输入端接低能耗无线控制单片机模块端口,用本末端执行器的